Factory Reset
When writing communications libraries one of the first things I try and get working is a “factory reset”. At some stage I will misconfigure the device so badly that it won’t work anymore and having a way to return to the device to its original configuration is really useful.
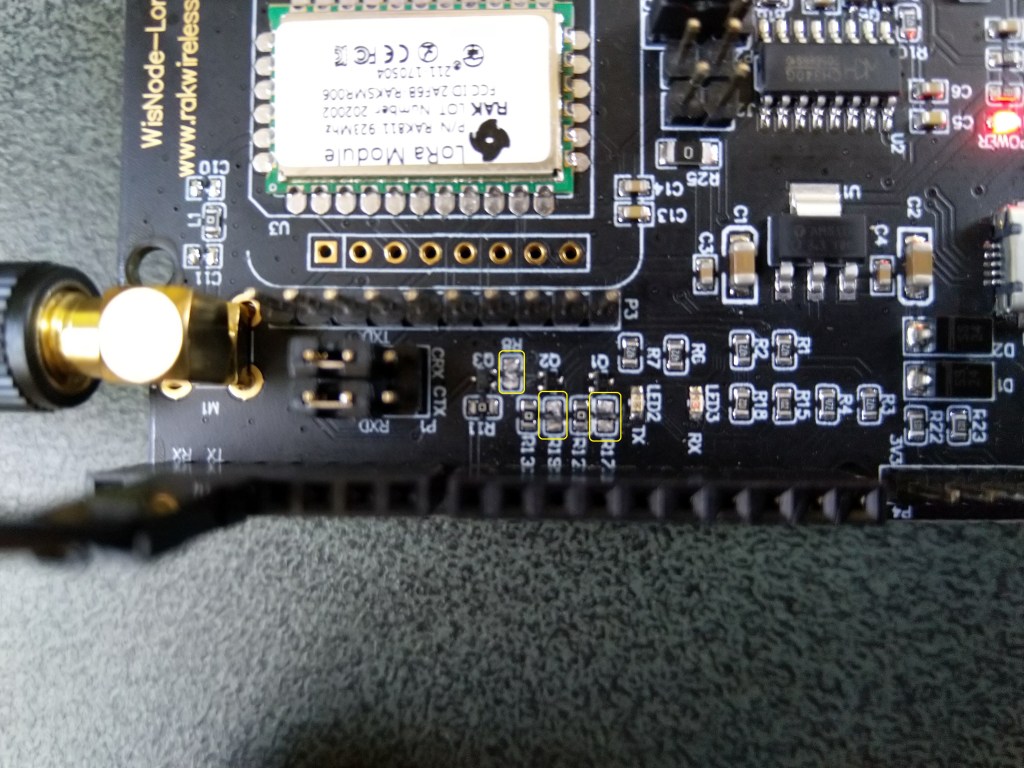
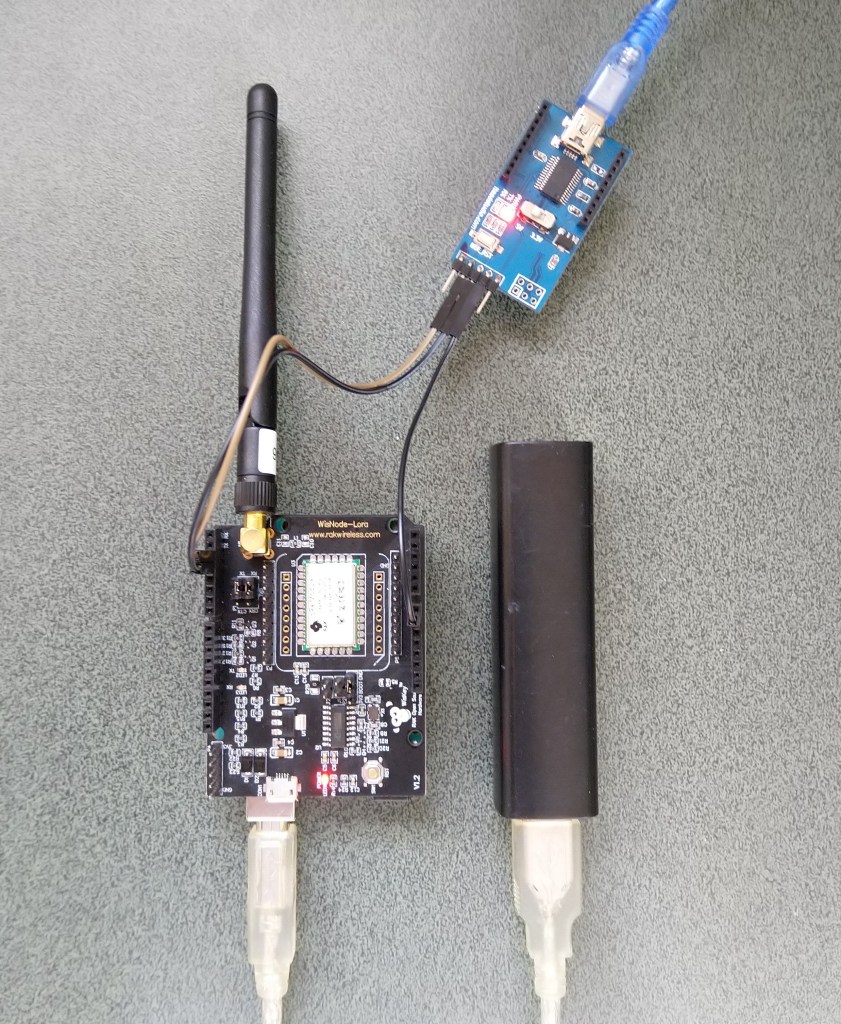
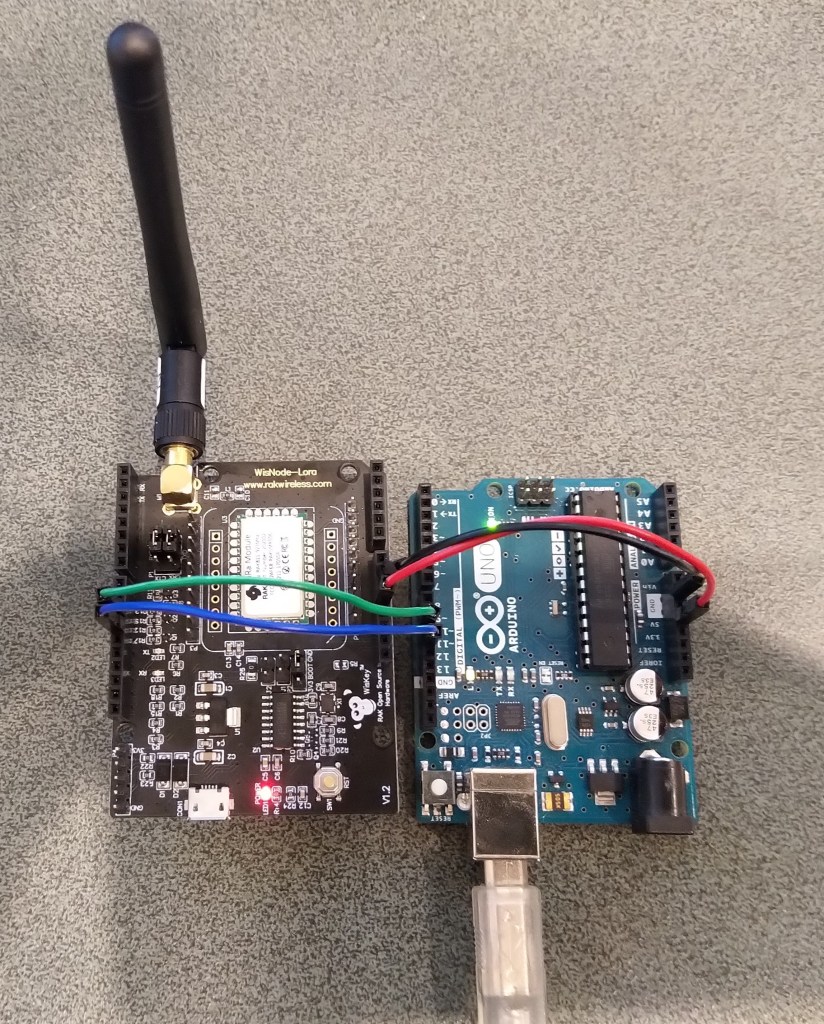
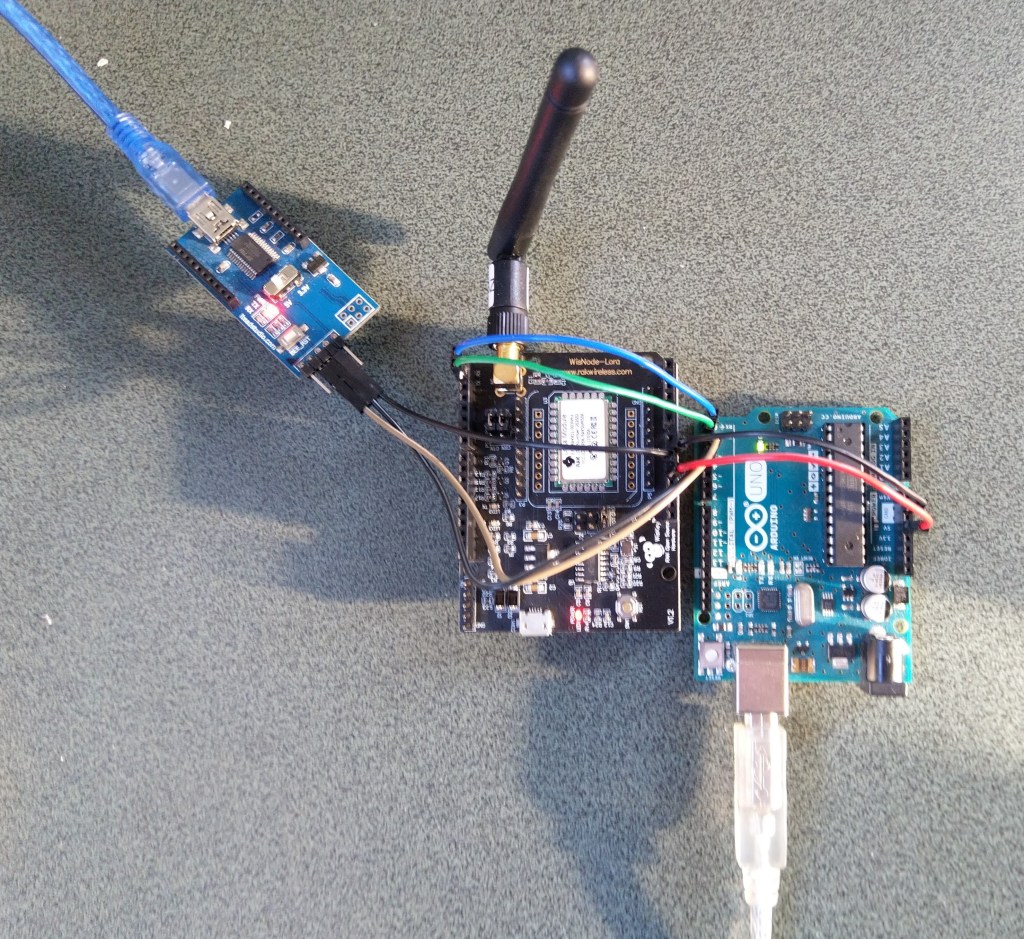
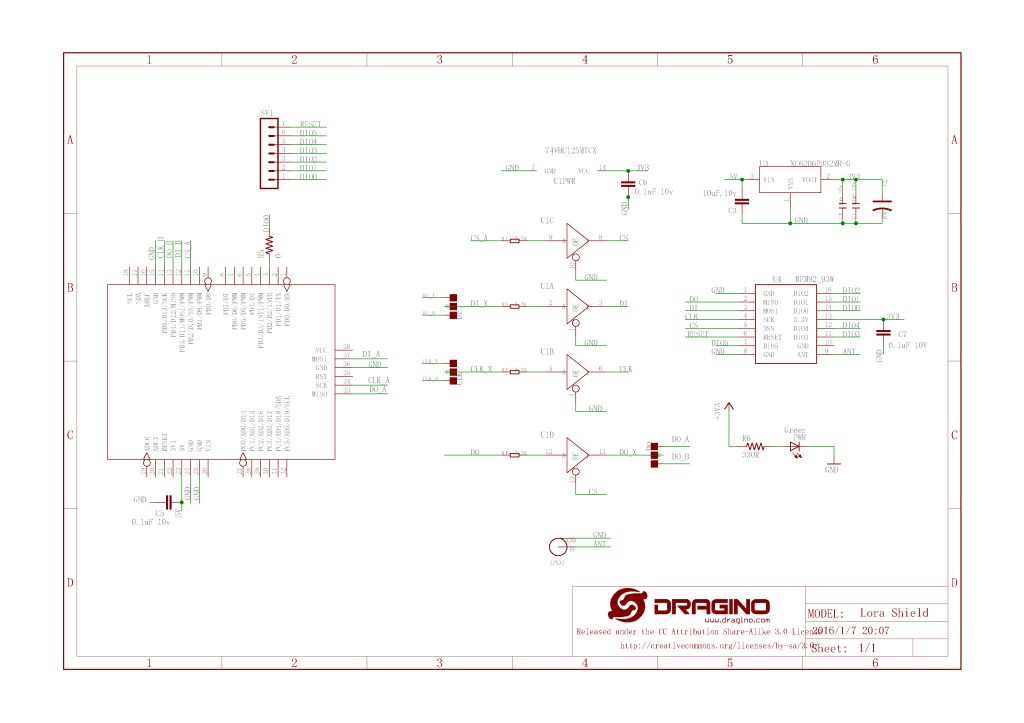
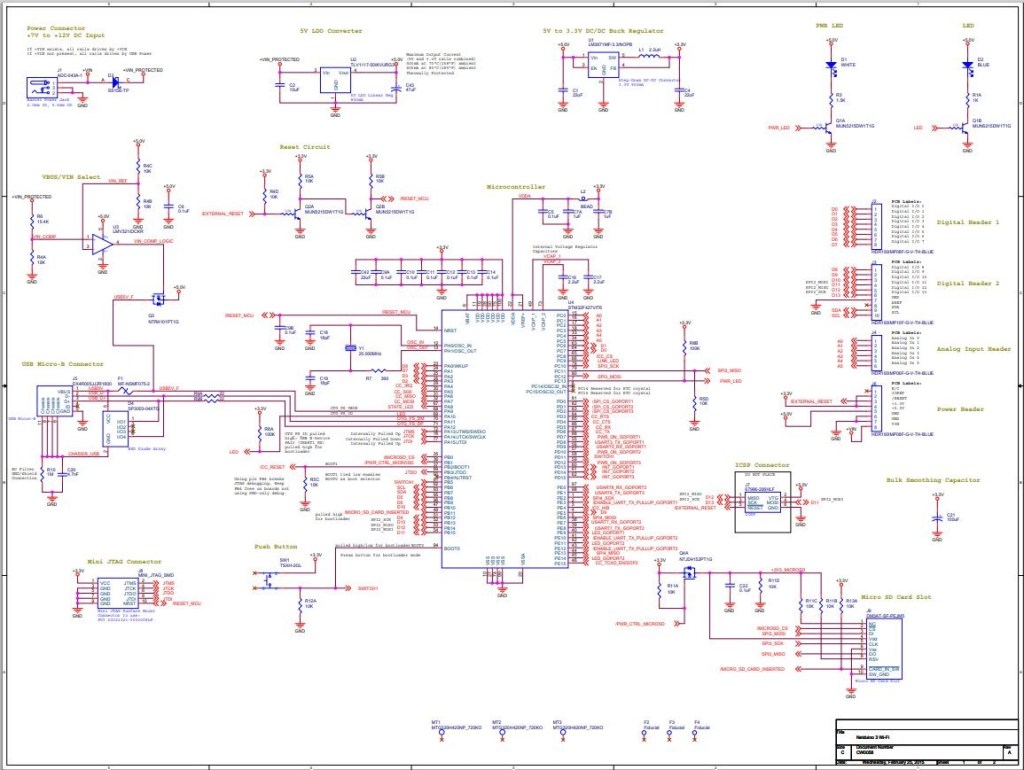
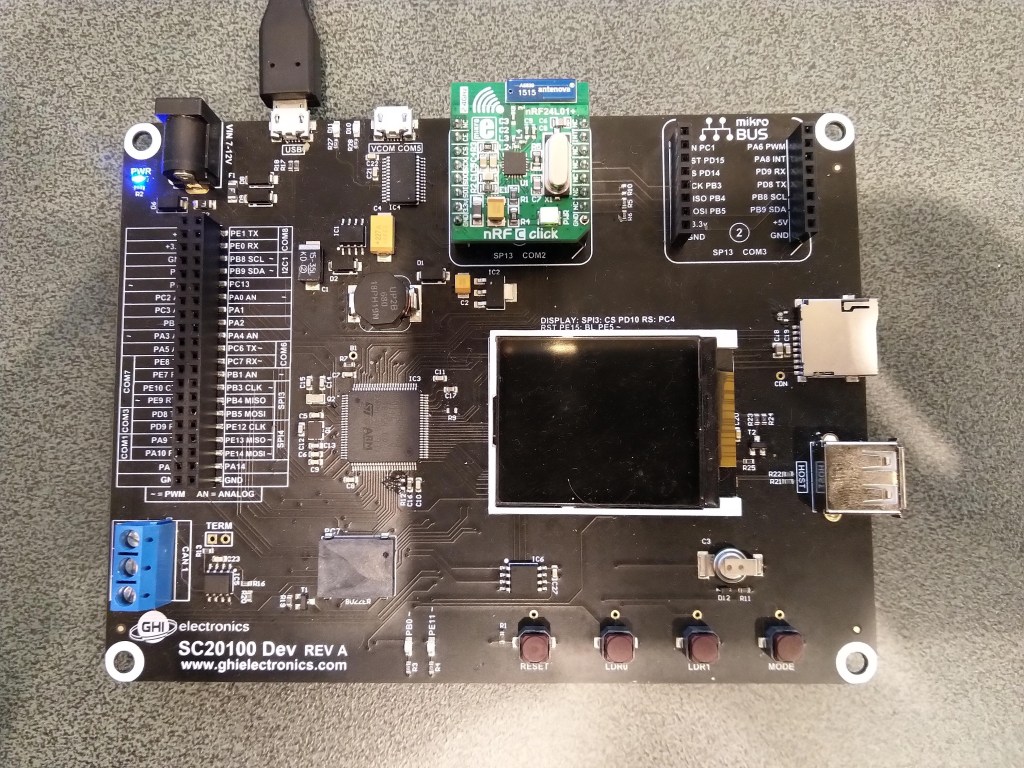
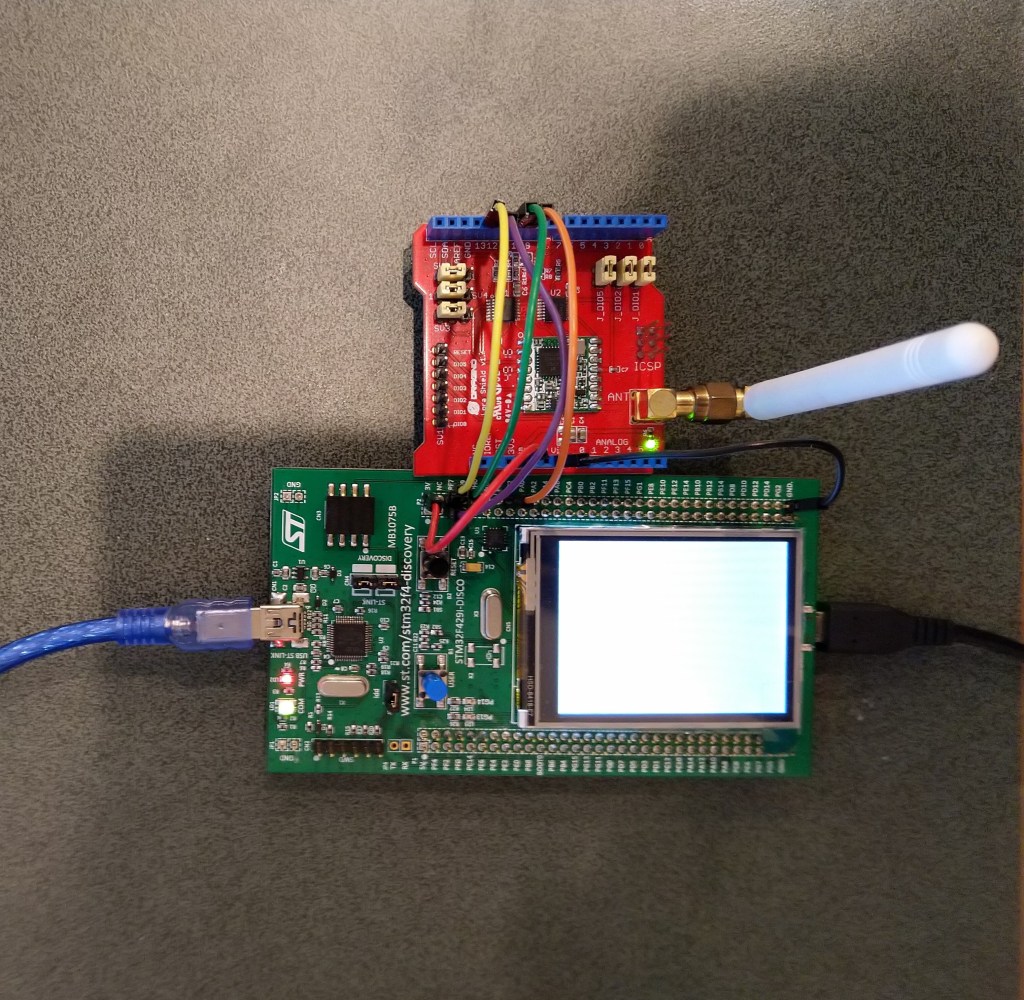
The RAK811 LPWAN Evaluation Board(EVB) test rig was based on an STM32F691DISCOVERY board which supports hardware (using D8 as I haven’t removed R11) and software reset with an AT command.
//---------------------------------------------------------------------------------
// Copyright (c) June 2020, devMobile Software
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
//
//---------------------------------------------------------------------------------
// nanoff --target ST_STM32F769I_DISCOVERY --update
//#define SERIAL_SYNC_READ
//#define HARDWARE_RESET
//#define SOFTWARE_RESTART
//#define DEVICE_STATUS
//#define LORA_STATUS
namespace devMobile.IoT.Rak811.FactoryReset
{
using System;
using System.Diagnostics;
using System.Threading;
using Windows.Devices.Gpio;
using Windows.Devices.SerialCommunication;
using Windows.Storage.Streams;
public class Program
{
private const string SerialPortId = "COM6";
public static void Main()
{
SerialDevice serialDevice;
Debug.WriteLine("devMobile.IoT.Rak811.FactoryReset starting");
Debug.WriteLine(Windows.Devices.SerialCommunication.SerialDevice.GetDeviceSelector());
try
{
#if HARDWARE_RESET
GpioPin resetPin = GpioController.GetDefault().OpenPin(PinNumber('J', 4));
resetPin.SetDriveMode(GpioPinDriveMode.Output);
resetPin.Write(GpioPinValue.Low);
#endif
serialDevice = SerialDevice.FromId(SerialPortId);
// set parameters
serialDevice.BaudRate = 9600;
serialDevice.Parity = SerialParity.None;
serialDevice.StopBits = SerialStopBitCount.One;
serialDevice.Handshake = SerialHandshake.None;
serialDevice.DataBits = 8;
serialDevice.ReadTimeout = new TimeSpan(0, 0, 30);
serialDevice.WriteTimeout = new TimeSpan(0, 0, 4);
DataWriter outputDataWriter = new DataWriter(serialDevice.OutputStream);
#if SERIAL_SYNC_READ
DataReader inputDataReader = new DataReader(serialDevice.InputStream);
#else
serialDevice.DataReceived += SerialDevice_DataReceived;
#endif
// set a watch char to be notified when it's available in the input stream
serialDevice.WatchChar = '\n';
while (true)
{
#if HARDWARE_RESET
resetPin.Write(GpioPinValue.High);
Thread.Sleep(10);
resetPin.Write(GpioPinValue.Low);
#endif
#if SOFTWARE_RESTART
uint bytesWritten = outputDataWriter.WriteString("at+set_config=device:restart\r\n");
Debug.WriteLine($"TX: {outputDataWriter.UnstoredBufferLength} bytes to output stream.");
// calling the 'Store' method on the data writer actually sends the data
uint txByteCount = outputDataWriter.Store();
Debug.WriteLine($"TX: {txByteCount} bytes via {serialDevice.PortName}");
#endif
#if DEVICE_STATUS
uint bytesWritten = outputDataWriter.WriteString("at+get_config=device:status\r\n");
Debug.WriteLine($"TX: {outputDataWriter.UnstoredBufferLength} bytes to output stream.");
// calling the 'Store' method on the data writer actually sends the data
uint txByteCount = outputDataWriter.Store();
Debug.WriteLine($"TX: {txByteCount} bytes via {serialDevice.PortName}");
#endif
#if LORA_STATUS
uint bytesWritten = outputDataWriter.WriteString("at+get_config=lora:status\r\n");
Debug.WriteLine($"TX: {outputDataWriter.UnstoredBufferLength} bytes to output stream.");
// calling the 'Store' method on the data writer actually sends the data
uint txByteCount = outputDataWriter.Store();
Debug.WriteLine($"TX: {txByteCount} bytes via {serialDevice.PortName}");
#endif
#if SERIAL_SYNC_READ
// June 2020 appears to be limited to 256 chars
uint bytesRead = inputDataReader.Load(50);
Debug.WriteLine($"RXs :{bytesRead} bytes read from {serialDevice.PortName}");
if (bytesRead > 0)
{
String response = inputDataReader.ReadString(bytesRead);
Debug.WriteLine($"RX sync:{response}");
}
#endif
Thread.Sleep(20000);
}
}
catch (Exception ex)
{
Debug.WriteLine(ex.Message);
}
}
private static void SerialDevice_DataReceived(object sender, SerialDataReceivedEventArgs e)
{
switch (e.EventType)
{
case SerialData.Chars:
//Debug.WriteLine("RX SerialData.Chars");
break;
case SerialData.WatchChar:
Debug.WriteLine("RX: SerialData.WatchChar");
SerialDevice serialDevice = (SerialDevice)sender;
using (DataReader inputDataReader = new DataReader(serialDevice.InputStream))
{
inputDataReader.InputStreamOptions = InputStreamOptions.Partial;
// read all available bytes from the Serial Device input stream
uint bytesRead = inputDataReader.Load(serialDevice.BytesToRead);
Debug.WriteLine($"RXa: {bytesRead} bytes read from {serialDevice.PortName}");
if (bytesRead > 0)
{
String response = inputDataReader.ReadString(bytesRead);
Debug.WriteLine($"RX:{response}");
}
}
break;
default:
Debug.Assert(false, $"e.EventType {e.EventType} unknown");
break;
}
}
static int PinNumber(char port, byte pin)
{
if (port < 'A' || port > 'J')
throw new ArgumentException();
return ((port - 'A') * 16) + pin;
}
}
}
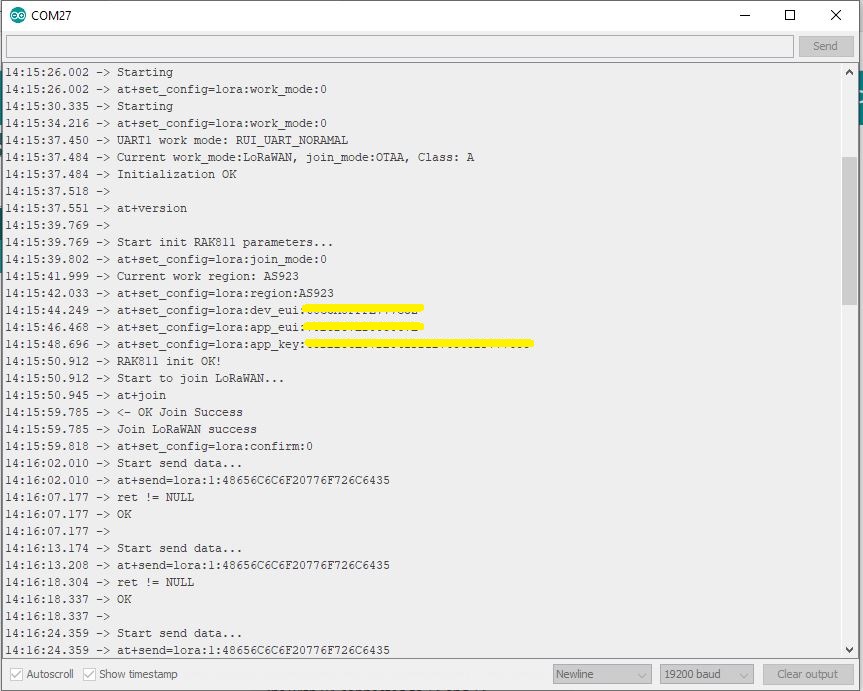
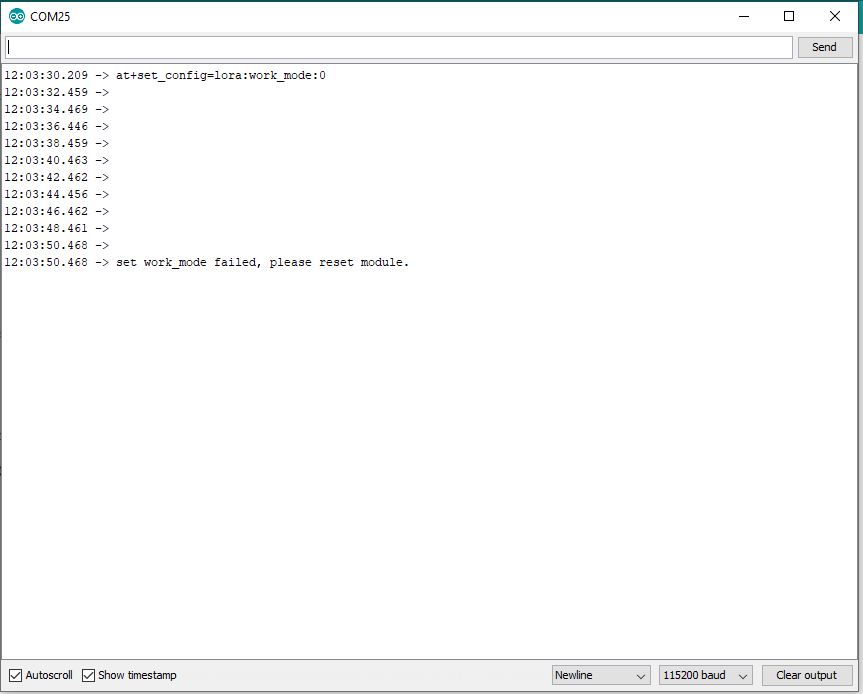
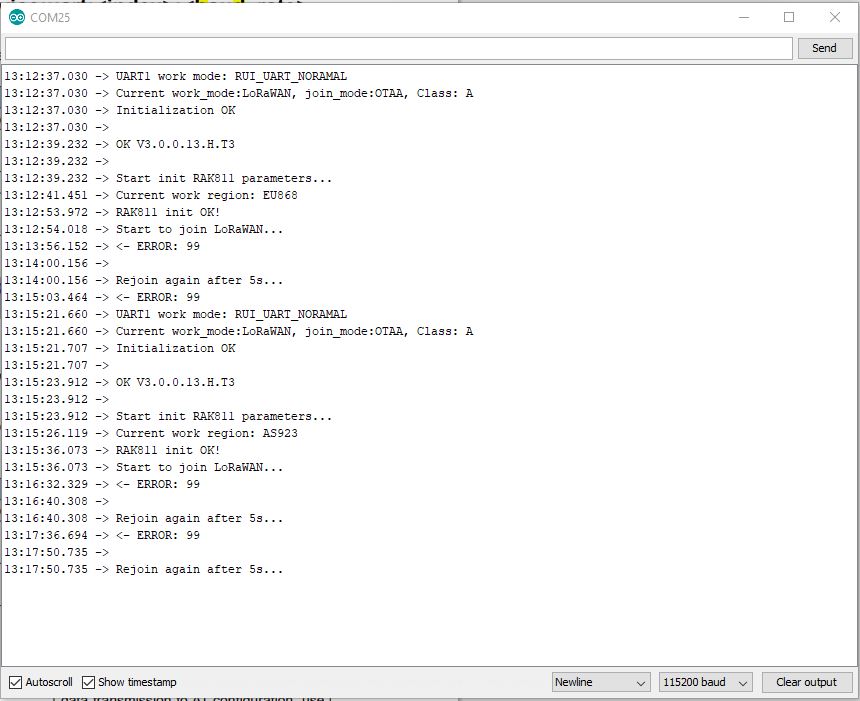
Initially I tried strobing D8 which is connected to the reset pin on the RAK811 module.
UART1 work mode: RUI_UART_NORAMAL
Current work_mode:LoRaWAN, join_mode:OTAA, Class: A
Initialization OK
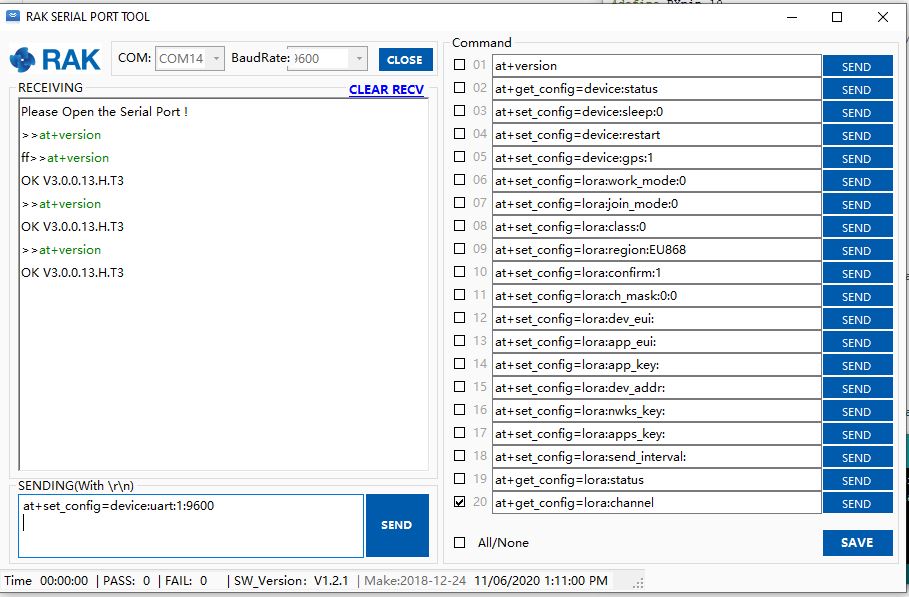
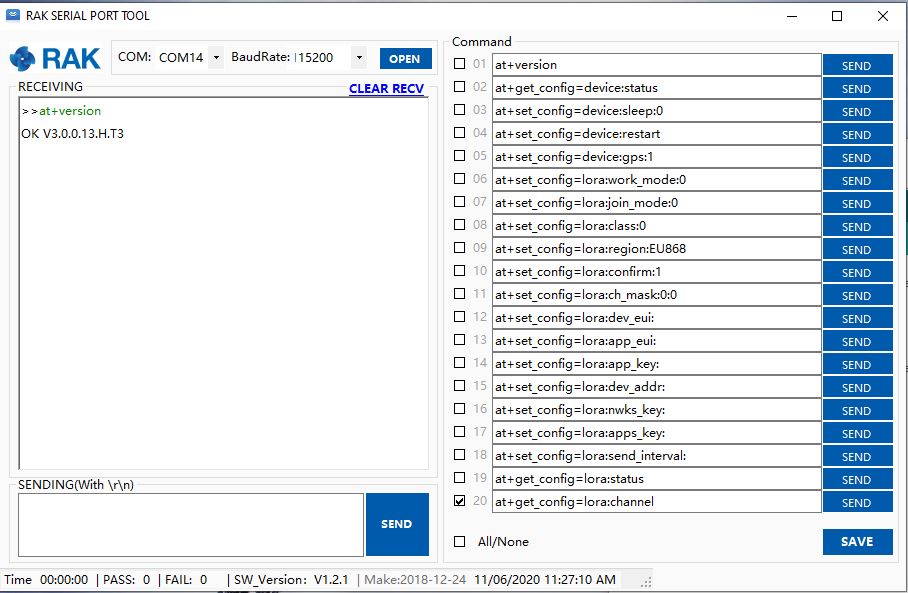
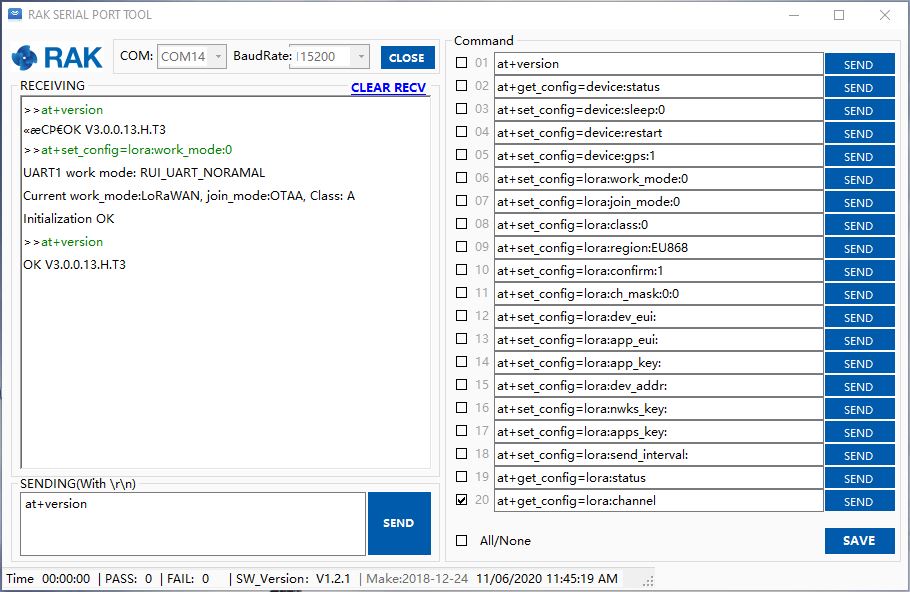
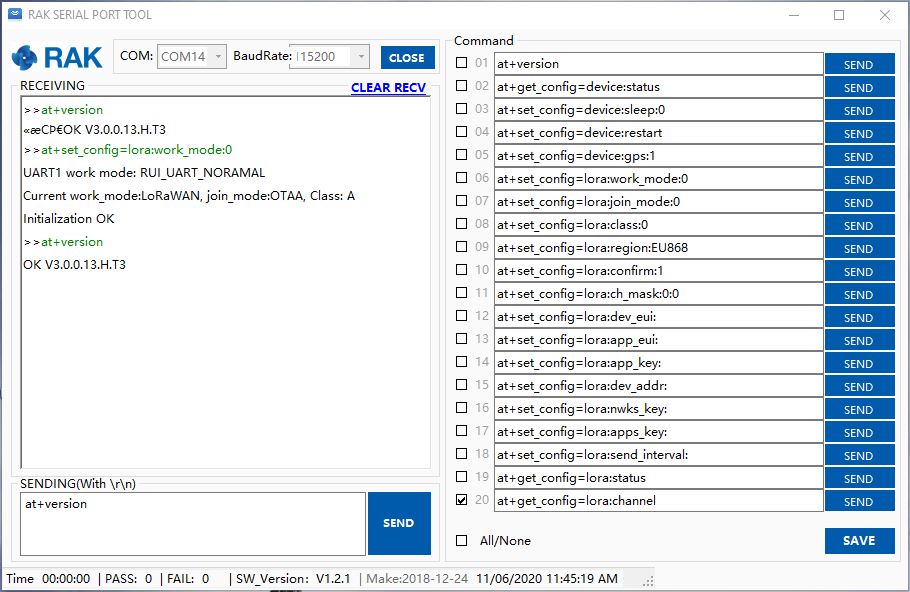
I then used the RAK Serial Port Tool to see if the configuration had changed
OK Work Mode: LoRaWAN
Region: AS923
Send_interval: 600s
Auto send status: false.
Join_mode: OTAA
DevEui: ...
AppEui: ...
AppKey: ...
Class: A
Joined Network:false
IsConfirm: false
AdrEnable: true
EnableRepeaterSupport: false
RX2_CHANNEL_FREQUENCY: 923200000, RX2_CHANNEL_DR:2
RX_WINDOW_DURATION: 3000ms
RECEIVE_DELAY_1: 1000ms
RECEIVE_DELAY_2: 2000ms
JOIN_ACCEPT_DELAY_1: 5000ms
JOIN_ACCEPT_DELAY_2: 6000ms
Current Datarate: 2
Primeval Datarate: 2
ChannelsTxPower: 0
UpLinkCounter: 0
DownLinkCounter: 0
The device reset but the settings appear not to have returned to factory.
I then tried the device:restart AT command
>>at+set_config=device:restart
UART1 work mode: RUI_UART_NORAMAL
Current work_mode:LoRaWAN, join_mode:OTAA, Class: A
Initialization OK
>>at+get_config=lora:status
OK Work Mode: LoRaWAN
Region: AS923
Send_interval: 600s
Auto send status: false.
Join_mode: OTAA
DevEui: ...
AppEui: ...
AppKey: ...
Class: A
Joined Network:false
IsConfirm: false
AdrEnable: true
EnableRepeaterSupport: false
RX2_CHANNEL_FREQUENCY: 923200000, RX2_CHANNEL_DR:2
RX_WINDOW_DURATION: 3000ms
RECEIVE_DELAY_1: 1000ms
RECEIVE_DELAY_2: 2000ms
JOIN_ACCEPT_DELAY_1: 5000ms
JOIN_ACCEPT_DELAY_2: 6000ms
Current Datarate: 2
Primeval Datarate: 2
ChannelsTxPower: 0
UpLinkCounter: 0
DownLinkCounter: 0
The device settings appear not to have returned to factory.
After some experimentation it looks like the only way to get a factory reset maybe re-flashing the device.