The arduino-LoRa library LoRaDuplex sample is the basis for the last in this series of posts. The LoRaDuplex sample implements a basic protocol for addressed messages. The message payload starts with the destination address(byte), source address(byte), message counter(byte), payload length(byte), and then the payload(array of bytes).
LoRaDuplex
The sample code has configuration settings for the local address and destination (address).
#include <SPI.h> // include libraries
#include <LoRa.h>
const int csPin = 10; // LoRa radio chip select
const int resetPin = 9; // LoRa radio reset
const int irqPin = 2; // change for your board; must be a hardware interrupt pin
String outgoing; // outgoing message
byte msgCount = 0; // count of outgoing messages
byte localAddress = 0xAA; // address of this device
byte destination = 0x0; // destination to send to
long lastSendTime = 0; // last send time
int interval = 2000; // interval between sends
void setup() {
Serial.begin(9600); // initialize serial
while (!Serial);
Serial.println("LoRa Duplex");
// override the default CS, reset, and IRQ pins (optional)
LoRa.setPins(csPin, resetPin, irqPin);// set CS, reset, IRQ pin
if (!LoRa.begin(915E6)) { // initialize ratio at 915 MHz
Serial.println("LoRa init failed. Check your connections.");
while (true); // if failed, do nothing
}
LoRa.enableCrc();
Serial.println("LoRa init succeeded.");
}
void loop() {
if (millis() - lastSendTime > interval) {
String message = "HeLoRa World!"; // send a message
sendMessage(message);
Serial.println("Sending " + message);
lastSendTime = millis(); // timestamp the message
interval = random(2000) + 29000; // 2-3 seconds
}
// parse for a packet, and call onReceive with the result:
onReceive(LoRa.parsePacket());
}
void sendMessage(String outgoing) {
LoRa.beginPacket(); // start packet
LoRa.write(destination); // add destination address
LoRa.write(localAddress); // add sender address
LoRa.write(msgCount); // add message ID
LoRa.write(outgoing.length()); // add payload length
LoRa.print(outgoing); // add payload
LoRa.endPacket(); // finish packet and send it
msgCount++; // increment message ID
}
void onReceive(int packetSize) {
if (packetSize == 0) return; // if there's no packet, return
// read packet header bytes:
int recipient = LoRa.read(); // recipient address
byte sender = LoRa.read(); // sender address
byte incomingMsgId = LoRa.read(); // incoming msg ID
byte incomingLength = LoRa.read(); // incoming msg length
String incoming = "";
while (LoRa.available()) {
incoming += (char)LoRa.read();
}
if (incomingLength != incoming.length()) { // check length for error
Serial.println("error: message length does not match length");
return; // skip rest of function
}
// if the recipient isn't this device or broadcast,
if (recipient != localAddress && recipient != 0xFF) {
Serial.println("This message is not for me.");
return; // skip rest of function
}
// if message is for this device, or broadcast, print details:
Serial.println("Received from: 0x" + String(sender, HEX));
Serial.println("Sent to: 0x" + String(recipient, HEX));
Serial.println("Message ID: " + String(incomingMsgId));
Serial.println("Message length: " + String(incomingLength));
Serial.println("Message: " + incoming);
Serial.println("RSSI: " + String(LoRa.packetRssi()));
Serial.println("Snr: " + String(LoRa.packetSnr()));
Serial.println();
}

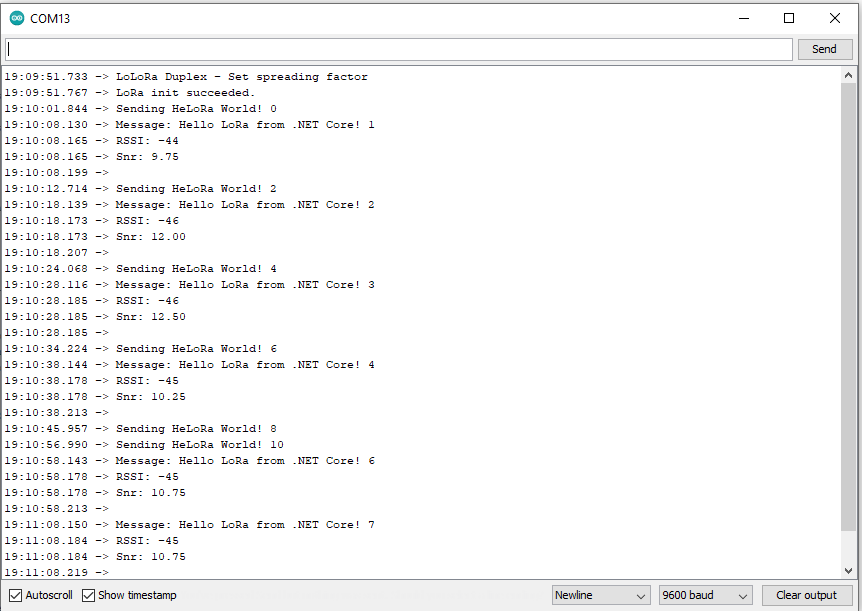
In the Visual Studio output window I could see the SX127XLoRaDeviceClient sending and receiving messages
Loaded '/usr/lib/dotnet/shared/Microsoft.NETCore.App/5.0.4/Microsoft.Win32.Primitives.dll'. Skipped loading symbols. Module is optimized and the debugger option 'Just My Code' is enabled.
17:26:10-TX to 0xAA from 0x00 count 1 length 28 "Hello LoRa from .NET Core! 1"
17:26:10-TX Done
17:26:20-TX to 0xAA from 0x00 count 2 length 28 "Hello LoRa from .NET Core! 2"
17:26:20-TX Done
17:26:30-TX to 0xAA from 0x00 count 3 length 28 "Hello LoRa from .NET Core! 3"
17:26:30-TX Done
17:26:31-RX to 0x00 from 0xAA count 0 length 13 "HeLoRa World!" snr 9.5 packet rssi -57dBm rssi -100dBm
17:26:40-TX to 0xAA from 0x00 count 4 length 28 "Hello LoRa from .NET Core! 4"
17:26:40-TX Done
17:26:50-TX to 0xAA from 0x00 count 5 length 28 "Hello LoRa from .NET Core! 5"
17:26:50-TX Done
17:27:00-TX to 0xAA from 0x00 count 6 length 28 "Hello LoRa from .NET Core! 6"
17:27:00-TX Done
17:27:01-RX to 0x00 from 0xBB count 1 length 13 "HeLoRa World!" snr 9.8 packet rssi -50dBm rssi -100dBm
17:27:10-TX to 0xAA from 0x00 count 7 length 28 "Hello LoRa from .NET Core! 7"
17:27:10-TX Done
17:27:20-TX to 0xAA from 0x00 count 8 length 28 "Hello LoRa from .NET Core! 8"
17:27:20-TX Done
17:27:30-TX to 0xAA from 0x00 count 9 length 28 "Hello LoRa from .NET Core! 9"
17:27:30-TX Done
I modified the SX127X.NetCore SX127XLoRaDeviceClient adding one final conditional compile option(LoRaDuplex) for this sample
static void Main(string[] args)
{
int messageCount = 1;
sX127XDevice.Initialise(
SX127XDevice.RegOpModeMode.ReceiveContinuous,
915000000.0,
powerAmplifier: SX127XDevice.PowerAmplifier.PABoost,
#if LORA_SENDER // From the Arduino point of view
rxDoneignoreIfCrcMissing: false
#endif
#if LORA_RECEIVER // From the Arduino point of view, don't actually need this as already inverted
invertIQTX: true
#endif
#if LORA_SET_SYNCWORD
syncWord: 0xF3,
invertIQTX: true,
rxDoneignoreIfCrcMissing: false
#endif
#if LORA_SET_SPREAD
spreadingFactor: SX127XDevice.RegModemConfig2SpreadingFactor._256ChipsPerSymbol,
invertIQTX: true,
rxDoneignoreIfCrcMissing: false
#endif
#if LORA_SIMPLE_NODE // From the Arduino point of view
invertIQTX: false,
rxDoneignoreIfCrcMissing: false
#endif
#if LORA_SIMPLE_GATEWAY // From the Arduino point of view
invertIQRX: true,
rxDoneignoreIfCrcMissing: false
#endif
#if LORA_DUPLEX
rxPayloadCrcOn: true
#endif
);
#if DEBUG
sX127XDevice.RegisterDump();
#endif
#if !LORA_RECEIVER
sX127XDevice.OnReceive += SX127XDevice_OnReceive;
sX127XDevice.Receive();
#endif
#if !LORA_SENDER
sX127XDevice.OnTransmit += SX127XDevice_OnTransmit;
#endif
#if LORA_SENDER
Thread.Sleep(-1);
#else
Thread.Sleep(5000);
#endif
while (true)
{
string messageText = "Hello LoRa from .NET Core! " + messageCount.ToString();
#if LORA_DUPLEX
byte[] messageBytes = new byte[messageText.Length+4];
messageBytes[0] = 0xaa;
messageBytes[1] = 0x00;
messageBytes[2] = (byte)messageCount;
messageBytes[3] = (byte)messageText.Length;
Array.Copy(UTF8Encoding.UTF8.GetBytes(messageText), 0, messageBytes, 4, messageBytes[3]);
Console.WriteLine($"{DateTime.Now:HH:mm:ss}-TX to 0x{messageBytes[0]:X2} from 0x{messageBytes[1]:X2} count {messageBytes[2]} length {messageBytes[3]} \"{messageText}\"");
#else
byte[] messageBytes = UTF8Encoding.UTF8.GetBytes(messageText);
Console.WriteLine($"{DateTime.Now:HH:mm:ss}- Length {messageBytes.Length} \"{messageText}\"");
#endif
messageCount += 1;
sX127XDevice.Send(messageBytes);
Thread.Sleep(10000);
}
}
private static void SX127XDevice_OnReceive(object sender, SX127XDevice.OnDataReceivedEventArgs e)
{
string messageText;
#if LORA_DUPLEX
if ((e.Data[0] != 0x00) && (e.Data[0] != 0xFF))
{
#if DEBUG
Console.WriteLine($"{DateTime.UtcNow:hh:mm:ss}-RX to 0x{e.Data[0]:X2} from 0x{e.Data[1]:X2} invalid address");
#endif
return;
}
// check payload not to long/short
if ((e.Data[3] + 4) != e.Data.Length)
{
Console.WriteLine($"{DateTime.UtcNow:hh:mm:ss}-RX Invalid payload");
return;
}
try
{
messageText = UTF8Encoding.UTF8.GetString(e.Data, 4, e.Data[3]);
Console.WriteLine($"{DateTime.Now:HH:mm:ss}-RX to 0x{e.Data[0]:X2} from 0x{e.Data[1]:X2} count {e.Data[2]} length {e.Data[3]} \"{messageText}\" snr {e.PacketSnr:0.0} packet rssi {e.PacketRssi}dBm rssi {e.Rssi}dBm ");
}
catch (Exception ex)
{
Console.WriteLine(ex.Message);
}
#else
try
{
messageText = UTF8Encoding.UTF8.GetString(e.Data);
Console.WriteLine($"{DateTime.Now:HH:mm:ss}-RX length {e.Data.Length} \"{messageText}\" snr {e.PacketSnr:0.0} packet rssi {e.PacketRssi}dBm rssi {e.Rssi}dBm ");
}
catch (Exception ex)
{
Console.WriteLine(ex.Message);
}
#endif
}
The inbound messages have to have a valid Cyclic Redundancy Check(CRC) and I ignore messages with an invalid payload length. The message protocol is insecure (but fine for demos) as the messages are sent as “plain text”, and the message headers/payload can be tampered with.
Summary
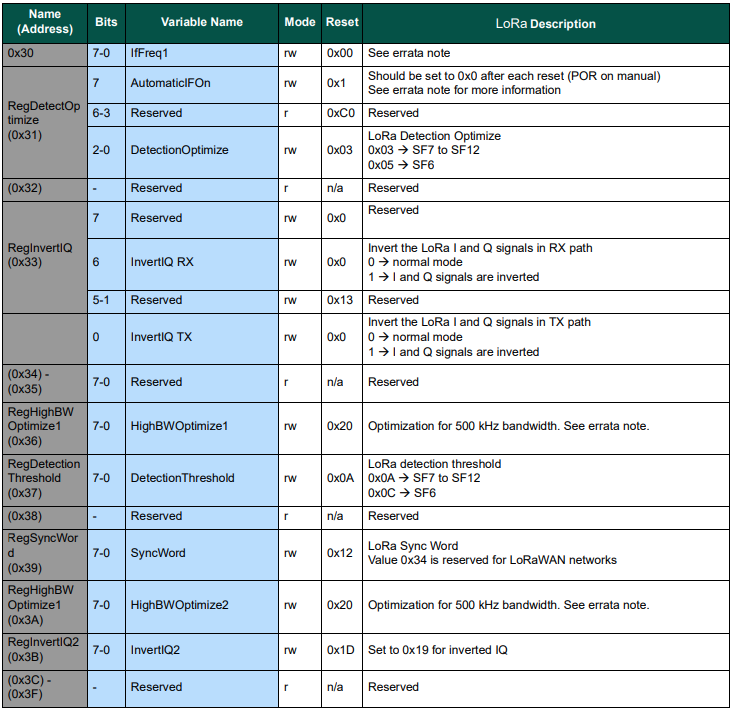
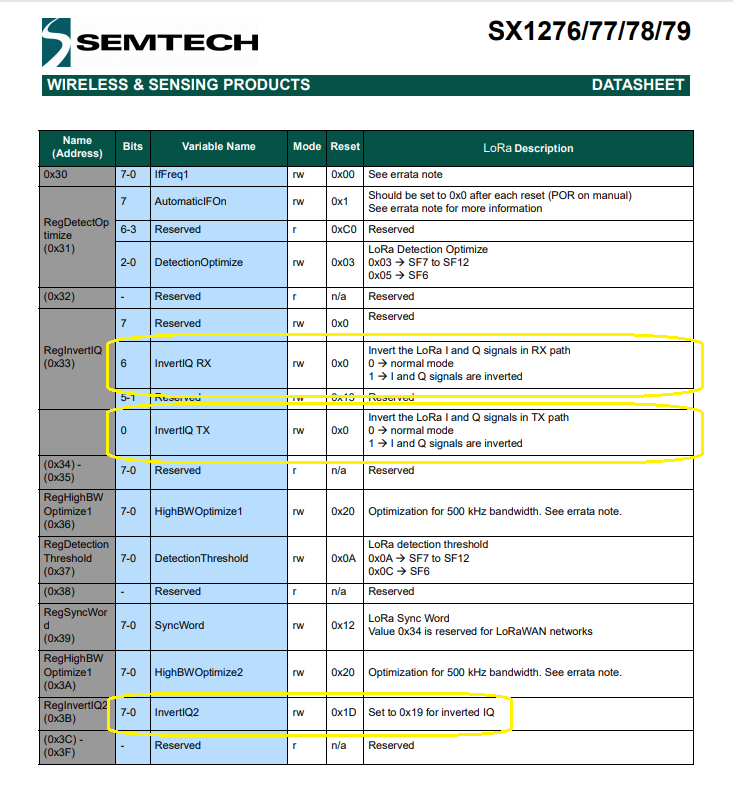
While testing the LoRaDuplex sample I found a problem with how my code managed the invertIQRX & invertIQTX flags in RegInvertIQ. I noticed the even though I was setting the InvertIQRX(bit6) and invertIQTX(bit0) flags correctly messages weren’t getting delivered.

After looking at my code I realised I wasn’t configuring the RegInvertIQ properly because bits 1-5 were getting set to 0x0 (initially I had byte regInvertIQValue = 0) rather than 0x13(regInvertIQValue = RegInvertIdDefault)
...
// RegInvertId
private const byte RegInvertIdDefault = 0b00100110;
private const byte InvertIqRXOn = 0b01000000;
private const byte InvertIqRXOff = 0b00000000;
public const bool InvertIqRXDefault = false;
private const byte InvertIqTXOn = 0b00000001;
private const byte InvertIqTXOff = 0b00000000;
...
if ((invertIQRX != InvertIqRXDefault) || (invertIQTX != InvertIqTXDefault))
{
// Initially this was byte regInvertIQValue = 0;
byte regInvertIQValue = RegInvertIdDefault;
if (invertIQRX)
{
regInvertIQValue |= InvertIqRXOn;
}
if (invertIQTX)
{
regInvertIQValue |= InvertIqTXOn;
}
this.WriteByte((byte)Registers.RegInvertIQ, regInvertIQValue);
if (invertIQRX || invertIQTX)
{
this.WriteByte((byte)Registers.RegInvertIQ2, RegInvertIq2On);
}
else
{
this.WriteByte((byte)Registers.RegInvertIQ2, RegInvertIq2Off);
}
}