Random wanderings through Microsoft Azure esp. PaaS plumbing, the IoT bits, AI on Micro controllers, AI on Edge Devices, .NET nanoFramework, .NET Core on *nix and ML.NET+ONNX
Uniview IPC3635SB-ADZK-I0 Security camera test rig with Raspberry PI and PIR motion detector
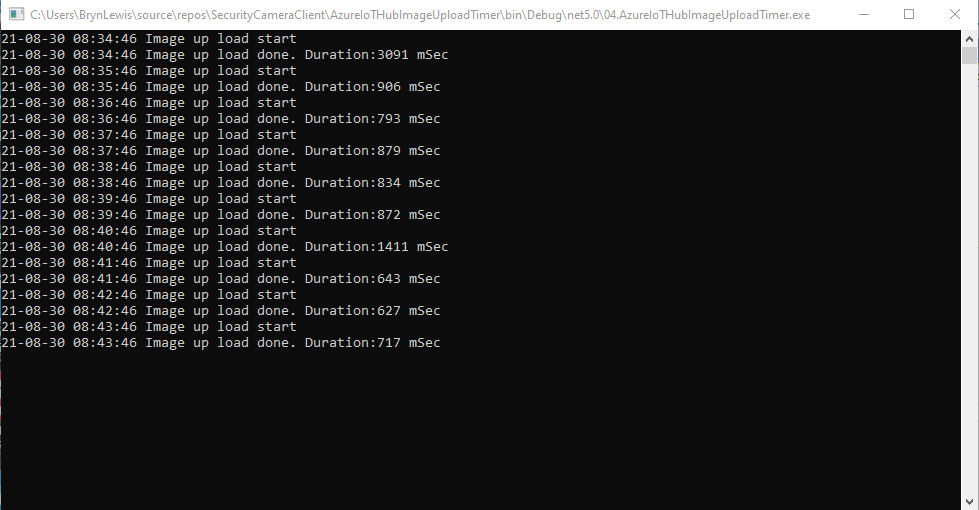
I tried to keep the .Net Core 5 console applications as simple as possible, they download an image from the camera “snapshot” endpoint (In this case http://10.0.0.47:85/images/snapshot.jpg), save it to the local filesystem and then upload it.
The core of the two applications is the “upload” image method, which is called by a timer or GPIO pin EventHandler
private static async void ImageUpdateTimerCallback(object state)
{
CommandLineOptions options = (CommandLineOptions)state;
DateTime requestAtUtc = DateTime.UtcNow;
// Just incase - stop code being called while retrival of the photo already in progress
if (cameraBusy)
{
return;
}
cameraBusy = true;
Console.WriteLine($"{requestAtUtc:yy-MM-dd HH:mm:ss} Image up load start");
try
{
// First go and get the image file from the camera onto local file system
using (var client = new WebClient())
{
NetworkCredential networkCredential = new NetworkCredential()
{
UserName = options.UserName,
Password = options.Password
};
client.Credentials = networkCredential;
await client.DownloadFileTaskAsync(new Uri(options.CameraUrl), options.LocalFilename);
}
// Then open the file ready to stream ito upto storage account associated with Azuure IoT Hub
using (FileStream fileStreamSource = new FileStream(options.LocalFilename, FileMode.Open))
{
var fileUploadSasUriRequest = new FileUploadSasUriRequest
{
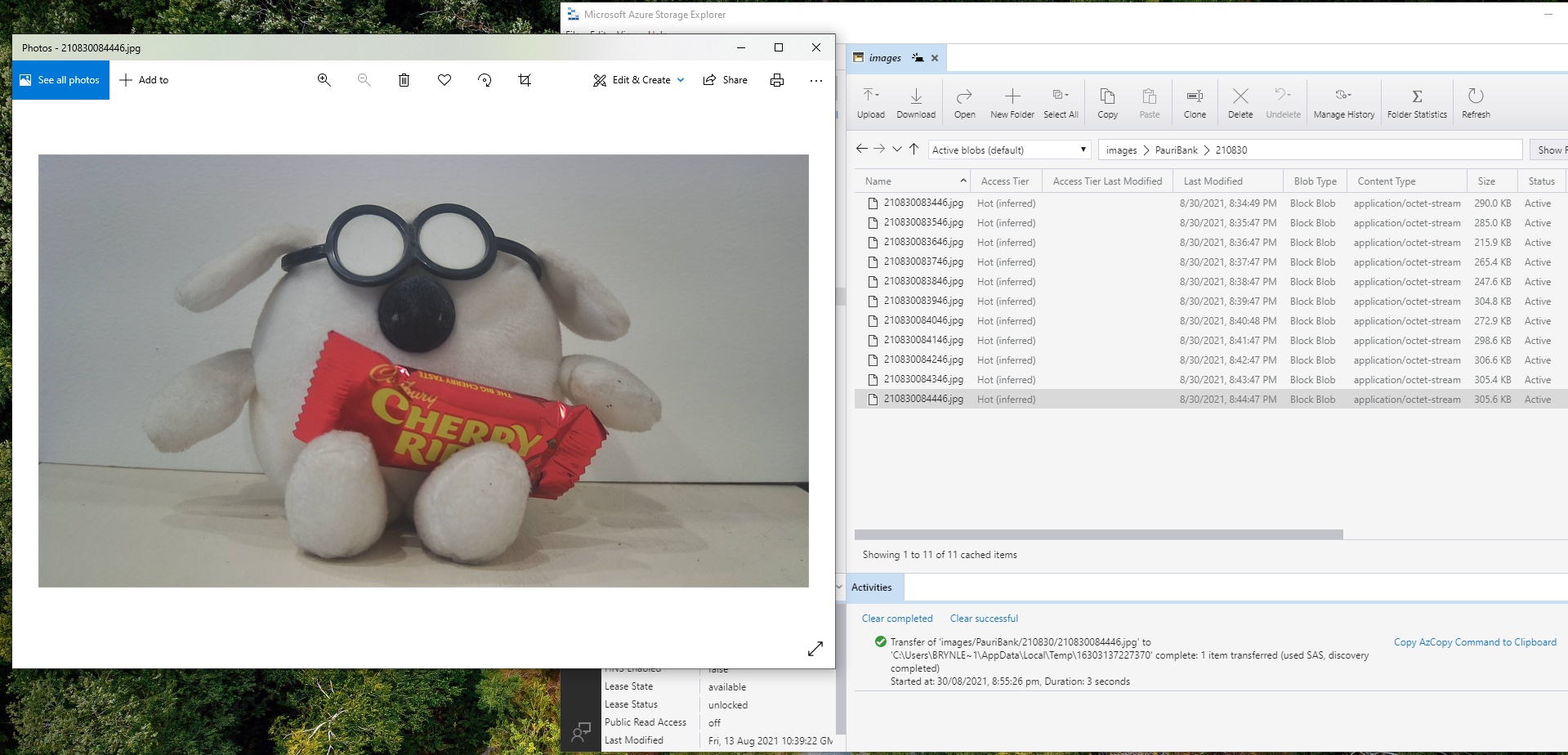
BlobName = string.Format("{0:yyMMdd}/{0:yyMMddHHmmss}.jpg", requestAtUtc)
};
// Get the plumbing sorted for where the file is going in Azure Storage
FileUploadSasUriResponse sasUri = await azureIoTCentralClient.GetFileUploadSasUriAsync(fileUploadSasUriRequest);
Uri uploadUri = sasUri.GetBlobUri();
try
{
var blockBlobClient = new BlockBlobClient(uploadUri);
var response = await blockBlobClient.UploadAsync(fileStreamSource, new BlobUploadOptions());
var successfulFileUploadCompletionNotification = new FileUploadCompletionNotification()
{
// Mandatory. Must be the same value as the correlation id returned in the sas uri response
CorrelationId = sasUri.CorrelationId,
// Mandatory. Will be present when service client receives this file upload notification
IsSuccess = true,
// Optional, user defined status code. Will be present when service client receives this file upload notification
StatusCode = 200,
// Optional, user-defined status description. Will be present when service client receives this file upload notification
StatusDescription = "Success"
};
await azureIoTCentralClient.CompleteFileUploadAsync(successfulFileUploadCompletionNotification);
}
catch (Exception ex)
{
Console.WriteLine($"Failed to upload file to Azure Storage using the Azure Storage SDK due to {ex}");
var failedFileUploadCompletionNotification = new FileUploadCompletionNotification
{
// Mandatory. Must be the same value as the correlation id returned in the sas uri response
CorrelationId = sasUri.CorrelationId,
// Mandatory. Will be present when service client receives this file upload notification
IsSuccess = false,
// Optional, user-defined status code. Will be present when service client receives this file upload notification
StatusCode = 500,
// Optional, user defined status description. Will be present when service client receives this file upload notification
StatusDescription = ex.Message
};
await azureIoTCentralClient.CompleteFileUploadAsync(failedFileUploadCompletionNotification);
}
}
TimeSpan uploadDuration = DateTime.UtcNow - requestAtUtc;
Console.WriteLine($"{requestAtUtc:yy-MM-dd HH:mm:ss} Image up load done. Duration:{uploadDuration.TotalMilliseconds:0.} mSec");
}
catch (Exception ex)
{
Console.WriteLine($"Camera image upload process failed {ex.Message}");
}
finally
{
cameraBusy = false;
}
}
The ONVIFspecification standardises the network interface (the network layer) of network video products. It defines a communication framework based on relevant IETF and Web Services standards including security and IP configuration requirements.
After discovering a device the next step was to query it to determine its capabilities. I had some issues with .Net Core 5 application configuring the Windows Communication Foundation(WCF) to use Digest authentication (RFC2617) credentials on all bar the device management service client.
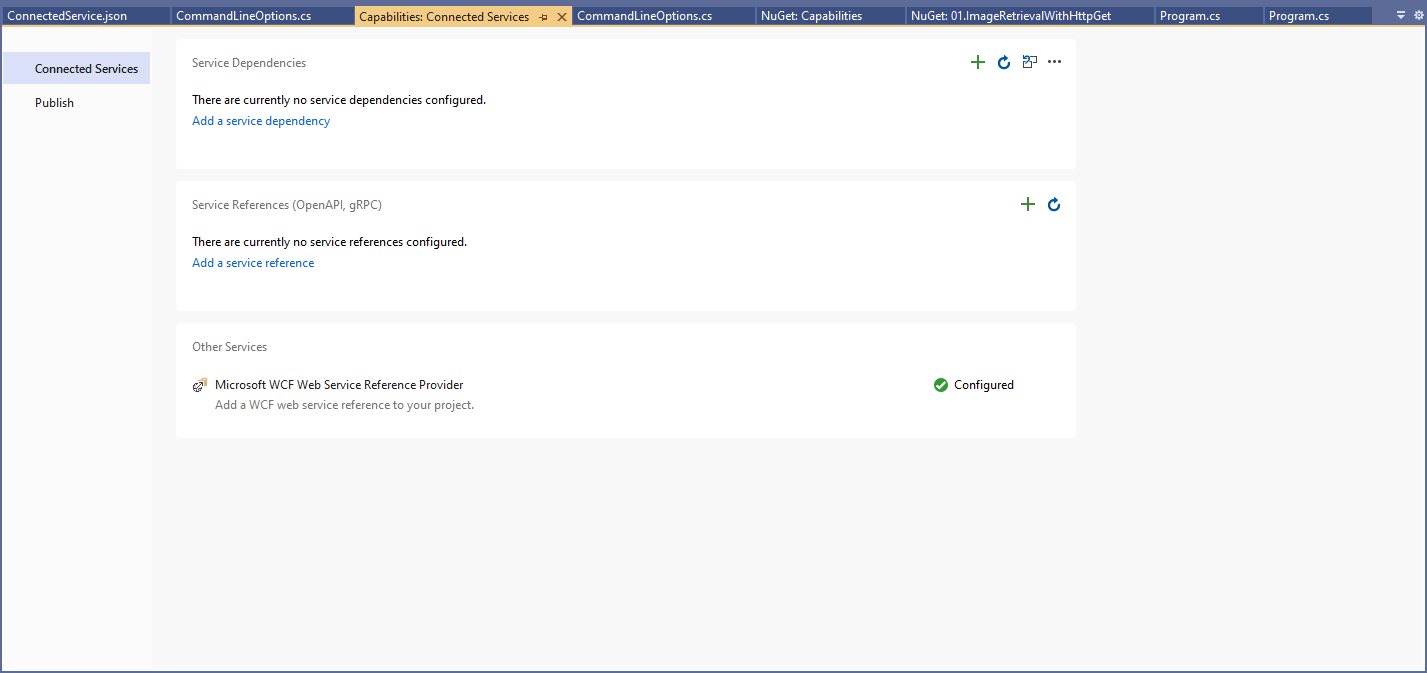
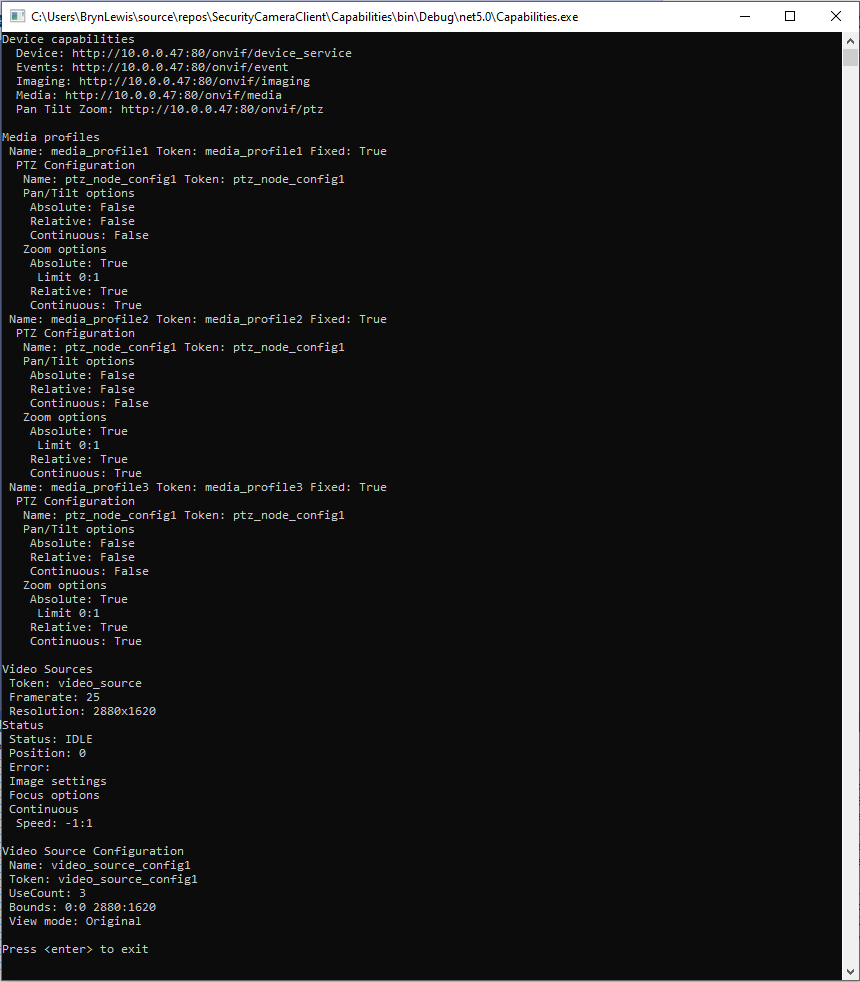
This .Net Core 5 console application queries the device management service (ONVID application programmers guide) to get the capabilities of the device then calls the media, imaging and pan tilt zoom services and displays the results.
The Uniform Resource Locators(URL) and namespace prefixes for each generated service are configured in the ConnectedService.json file.
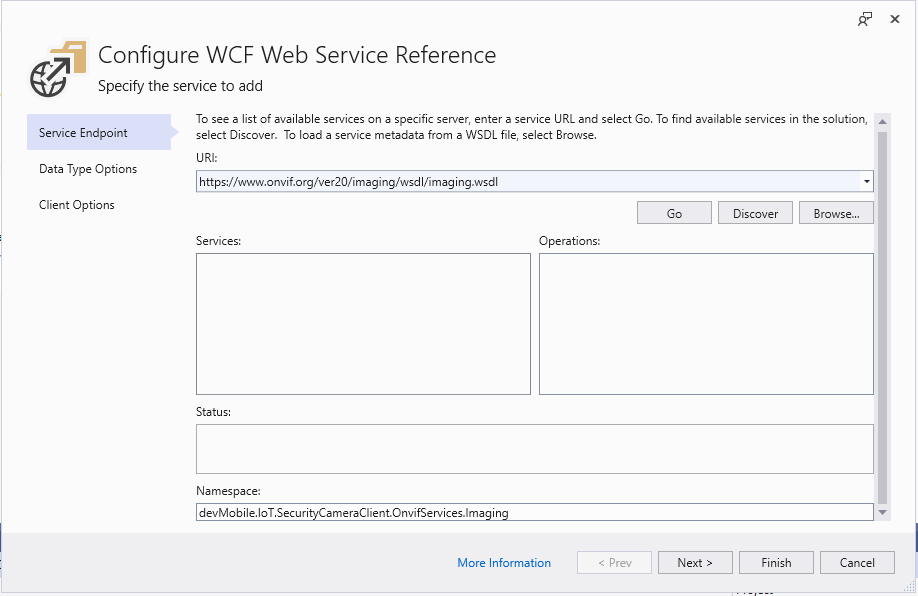
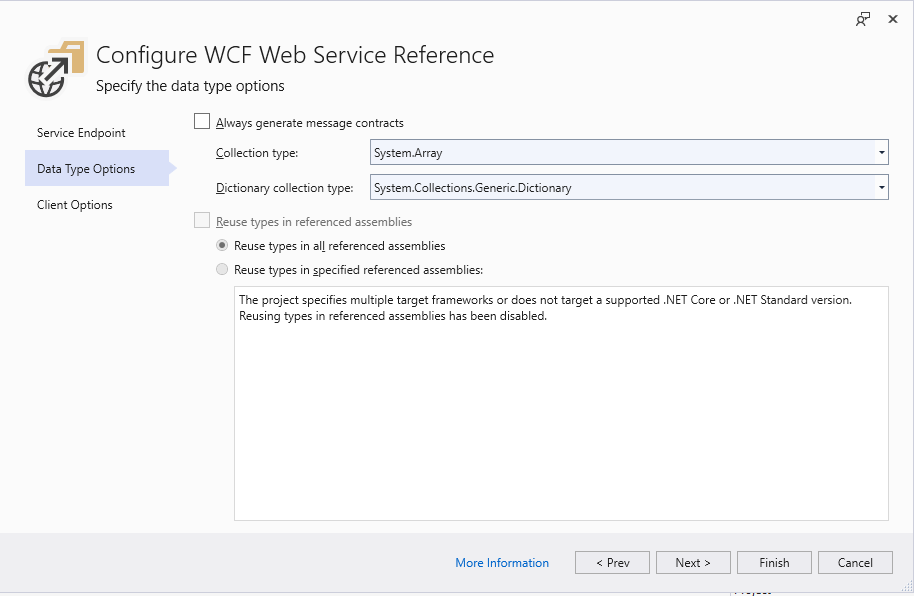
First step configuring a WCF Service
Initially I used a devMobile.IoT.SecurityCameraClient prefix but after some experimentation changed to OnvifServices.
Second step configuring a WCF Service
For testing I selected “Generated Synchronous Operations” as they are easier to use in a console application while exploring the available functionality.
Third step configuring a WCF Service
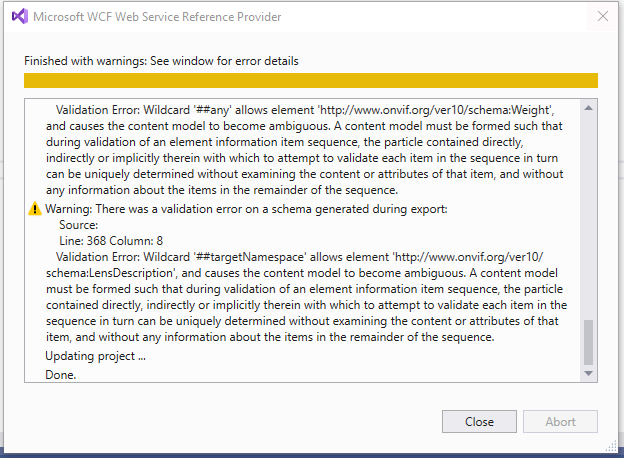
The WSDL generated a number of warnings so I inspected the WSDL to see if the were easy to fix. I did consider copying the WSDL to my development box but it didn’t appear to be worth the effort.
SVCUtil warning messages about invalid Onvif WSDL
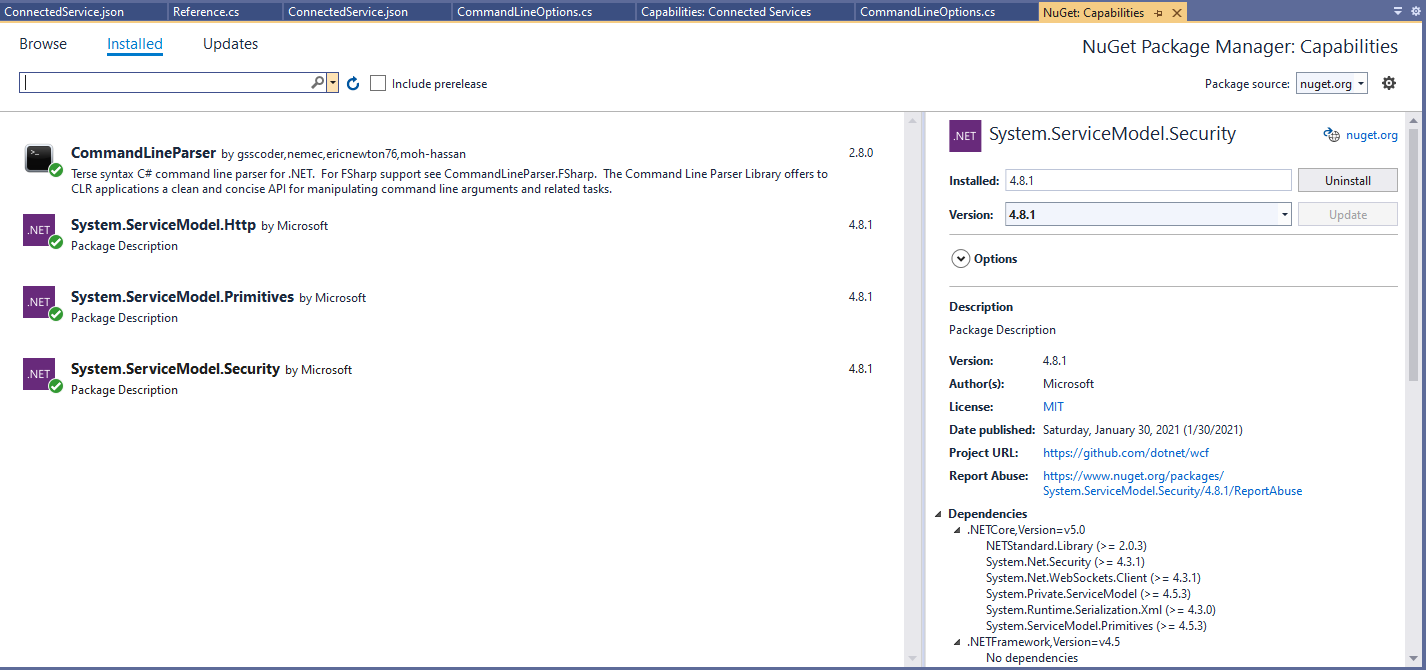
For this application I’m using the CommandLineParser NuGet package to parse and validate the client, username and password configured in the debugger tab.
Required Nuget packages
private static async Task ApplicationCore(CommandLineOptions options)
{
Device deviceClient;
ImagingPortClient imagingPortClient;
MediaClient mediaClient;
PTZClient panTiltZoomClient;
var messageElement = new TextMessageEncodingBindingElement()
{
MessageVersion = MessageVersion.CreateVersion(EnvelopeVersion.Soap12, AddressingVersion.None),
WriteEncoding = Encoding.UTF8
};
HttpTransportBindingElement httpTransportNoPassword = new HttpTransportBindingElement();
CustomBinding bindingHttpNoPassword = new CustomBinding(messageElement, httpTransportNoPassword);
HttpTransportBindingElement httpTransport = new HttpTransportBindingElement()
{
AuthenticationScheme = AuthenticationSchemes.Digest
};
CustomBinding bindingHttpPassword = new CustomBinding(messageElement, httpTransport);
try
{
// Setup the imaging porting binding, use TLS, and ignore certificate errors
deviceClient = new DeviceClient(bindingHttpNoPassword, new EndpointAddress($"http://{options.CameraUrl}/onvif/devicemgmt"));
GetCapabilitiesResponse capabilitiesResponse = await deviceClient.GetCapabilitiesAsync(new GetCapabilitiesRequest(new CapabilityCategory[] { CapabilityCategory.All }));
Console.WriteLine("Device capabilities");
Console.WriteLine($" Device: {capabilitiesResponse.Capabilities.Device.XAddr}");
Console.WriteLine($" Events: {capabilitiesResponse.Capabilities.Events.XAddr}"); // Not interested in events for V1
Console.WriteLine($" Imaging: {capabilitiesResponse.Capabilities.Imaging.XAddr}");
Console.WriteLine($" Media: {capabilitiesResponse.Capabilities.Media.XAddr}");
Console.WriteLine($" Pan Tilt Zoom: {capabilitiesResponse.Capabilities.PTZ.XAddr}");
Console.WriteLine();
...
Console.WriteLine($"Video Source Configuration");
foreach (OnvifServices.Media.VideoSourceConfiguration videoSourceConfiguration in videoSourceConfigurations.Configurations)
{
Console.WriteLine($" Name: {videoSourceConfiguration.Name}");
Console.WriteLine($" Token: {videoSourceConfiguration.token}");
Console.WriteLine($" UseCount: {videoSourceConfiguration.UseCount}");
Console.WriteLine($" Bounds: {videoSourceConfiguration.Bounds.x}:{videoSourceConfiguration.Bounds.y} {videoSourceConfiguration.Bounds.width}:{videoSourceConfiguration.Bounds.height}");
Console.WriteLine($" View mode: {videoSourceConfiguration.ViewMode}");
}
}
catch (Exception ex)
{
Console.WriteLine(ex.Message);
}
Console.WriteLine();
Console.WriteLine("Press <enter> to exit");
Console.ReadLine();
}
I had to do a bit of “null checking” as often if a feature wasn’t supported the root node was null. I need to get a selection of cameras (especially one with pan/tilt/zoom) to check that I’m processing the responses from the device correctly.
Console application output showing capabilities of Uniview device
After confirming the program was working on my development box I used the excellent RaspberryDebugger to download the application and run it on a Raspberry PI 3 running the Raspberry PI OS.
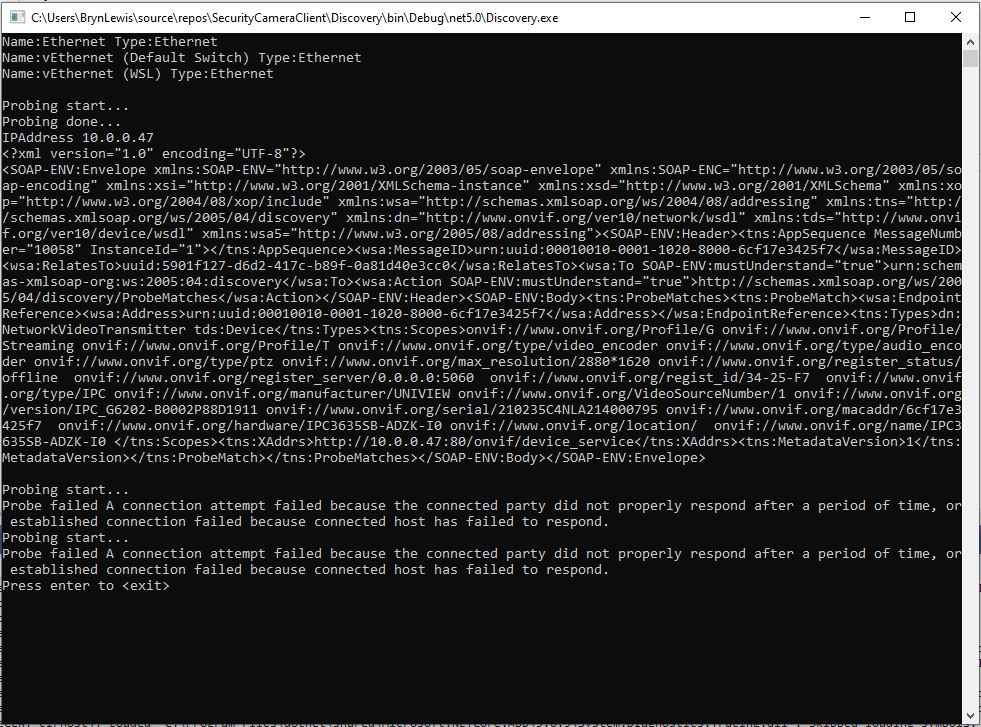
The ONVIFspecification standardises the network interface (the network layer) of network video products. It defines a communication framework based on relevant IETF and Web Services standards including security and IP configuration requirements. ONVIF uses Web Services Dynamic Discovery (WS-Discovery) to locate devices on the local network which operates over UDP port 3702 and uses IP multicast address 239.255.255.250.
My .Net Core 5 console application enumerates the host device’s network interfaces, then sends a “probe” message and waits for responses. The ONVID application programmers guide specifies the format of the “probe” request and response messages (One of the namespace prefixes in the sample is wrong). The client device can return its name and details of it’s capabilities in the response. Currently I only need the IP addresses of the cameras but if more information was required I would use the XML Serialisation functionality of .Net Core to generate the requests and unpack the responses.
As part of a contract a customer sent me a UniviewIPC3635SB-ADZK-I0 Security camera for a proof of concept(PoC) project. Before the PoC I wanted to explore the camera functionality in more depth, especially how to retrieve individual images from the camera, remotely control it’s zoom, focus, pan, tilt etc.. I’m trying to source a couple of other vendors’ security cameras with remotely controllable pan and tilt for testing.
Uniview IPC3635SB-ADZK-I0 Security camera
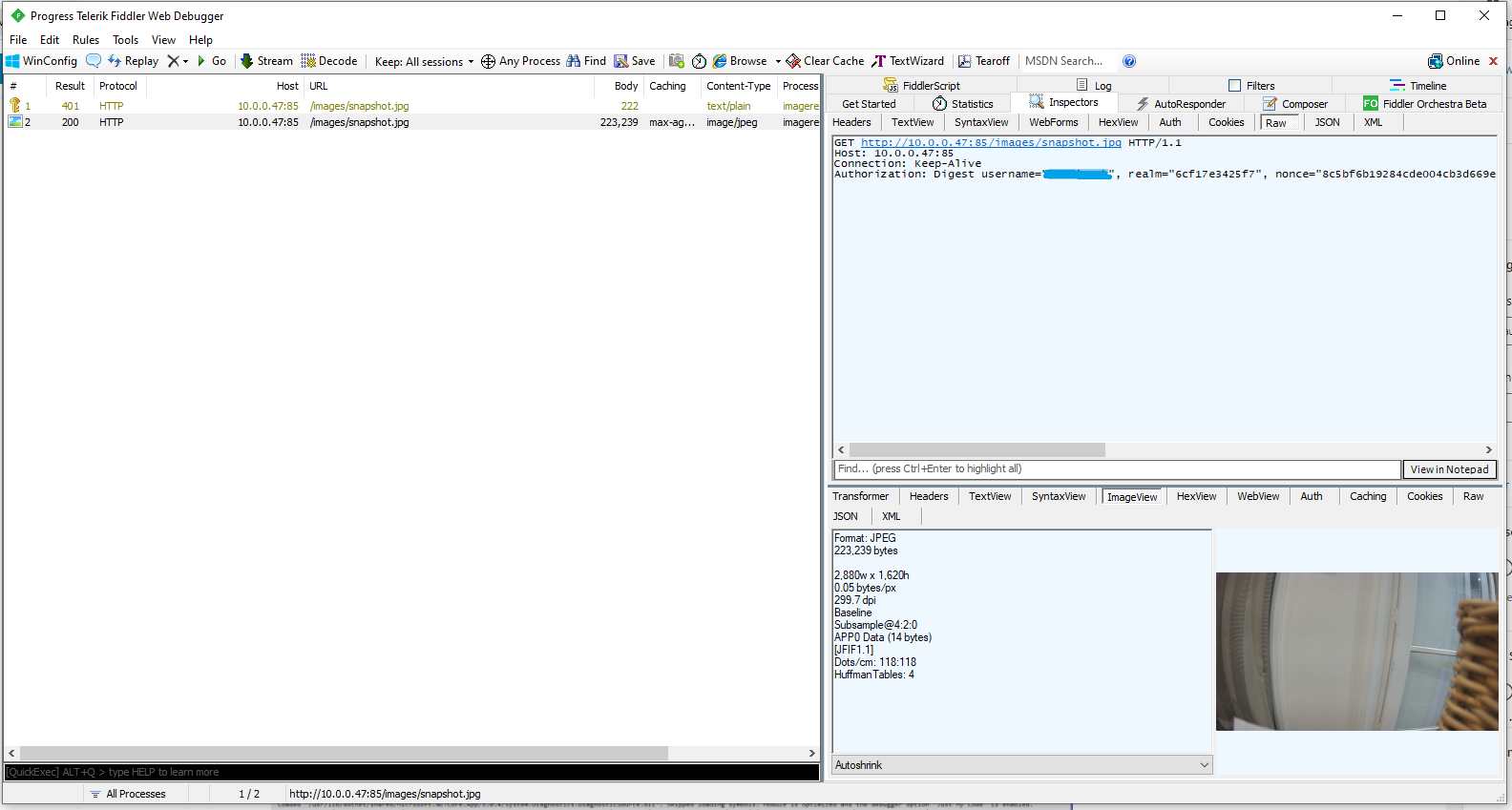
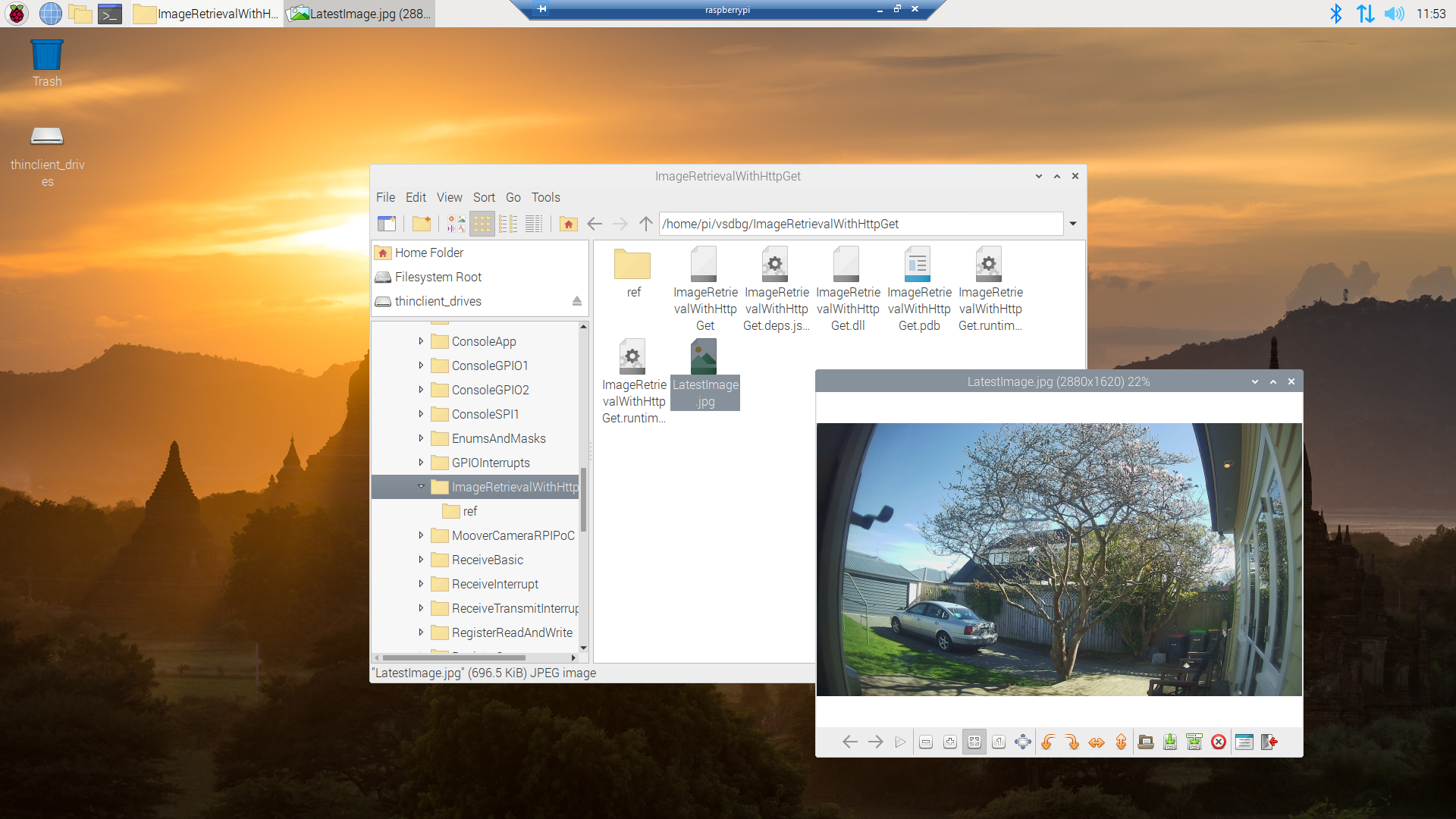
It appears that many cameras support retrieving the latest image with an HyperText Transfer Protocol (HTTP) GET so that looked like a good place to start. For the next couple of posts the camera will be sitting on the bookcase in my office looking through the window at the backyard.
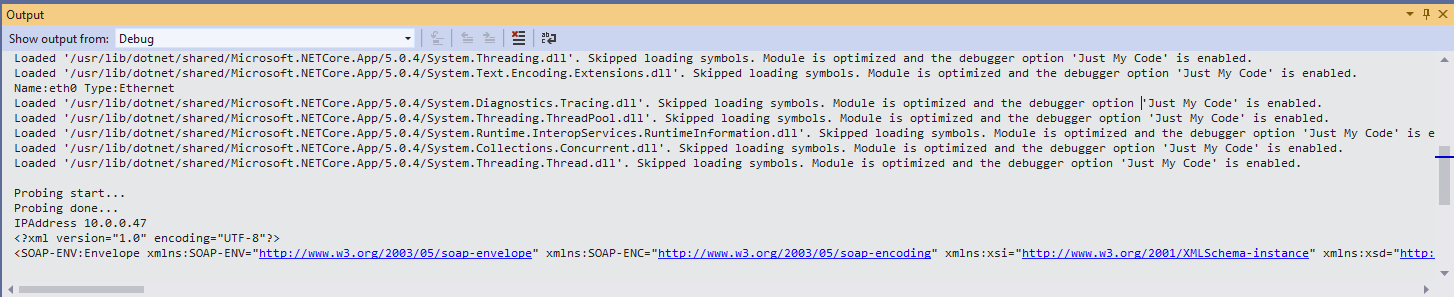
My .Net Core 5 console application is as simple possible, it just downloads an image from the camera “snapshot” endpoint (In this case http://10.0.0.47:85/images/snapshot.jpg) and saves it to the local filesystem.
Visual Studio 2019 Debug Output showing application download process
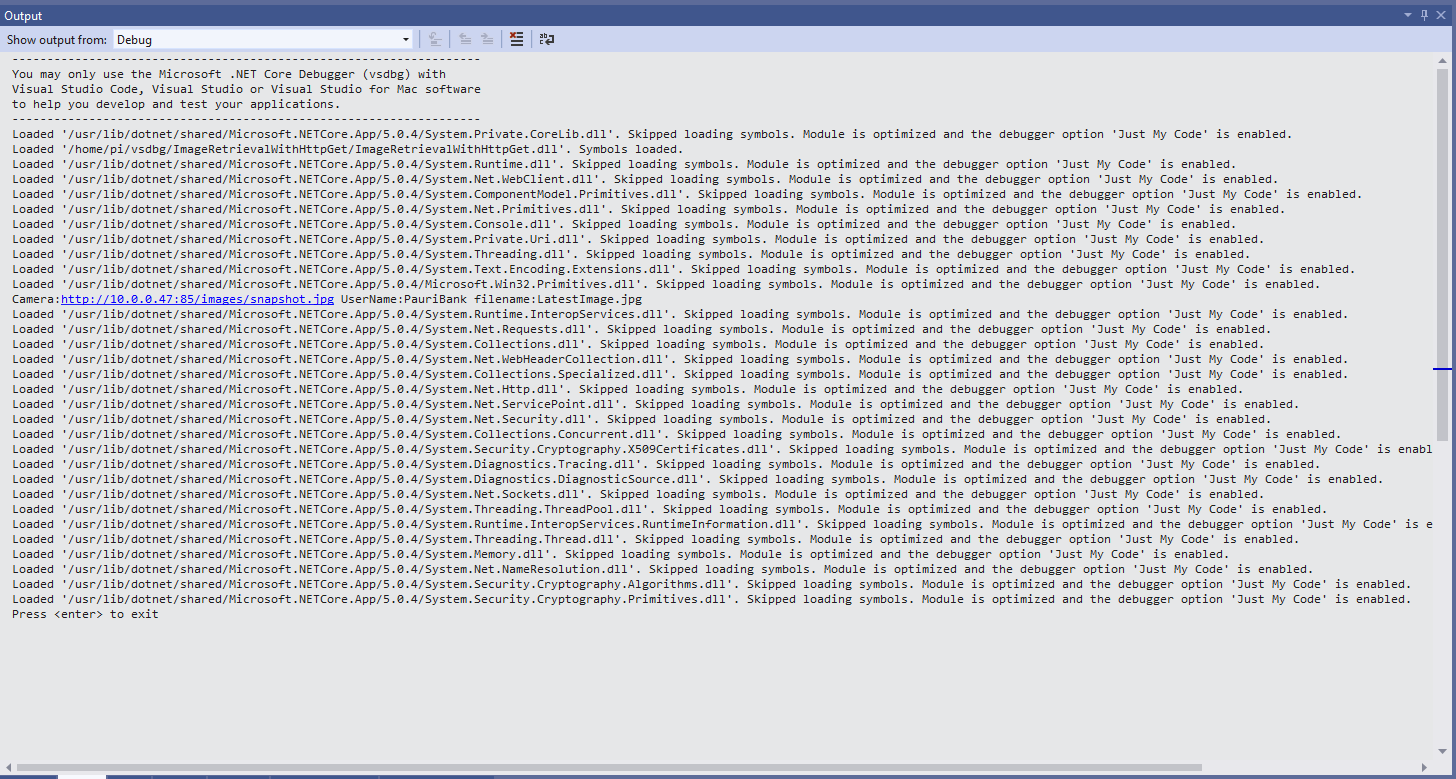
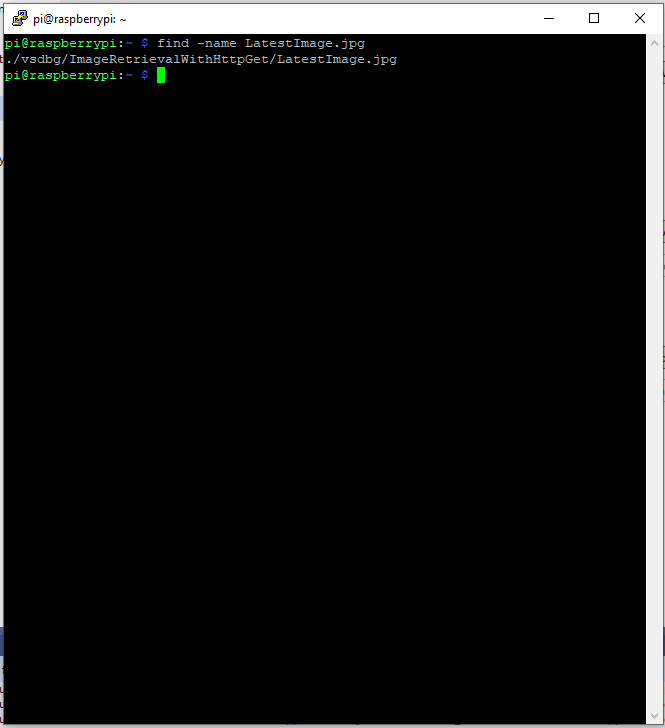
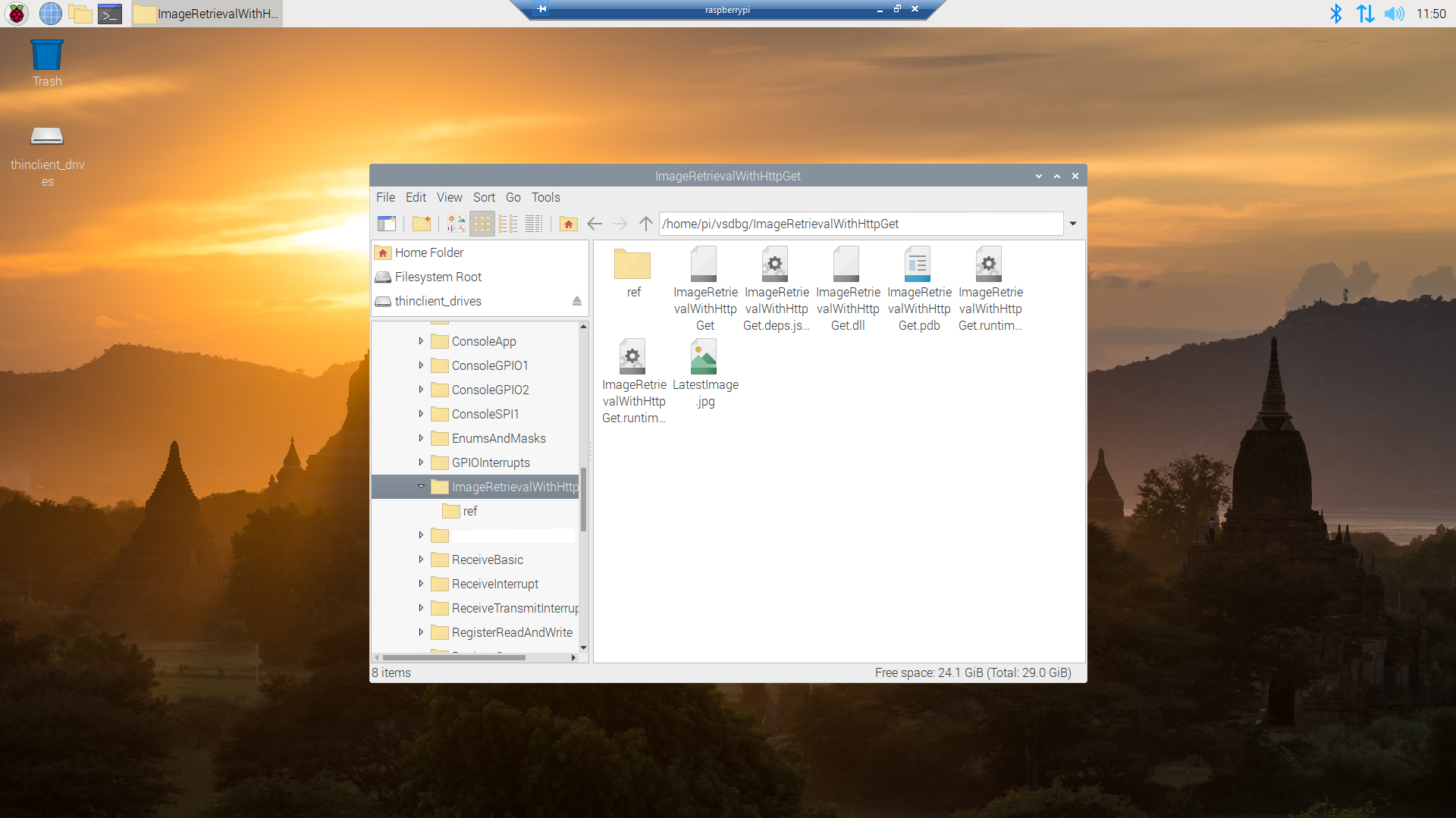
Once the application had finished running on the device I wanted to check that the file was on the local filesystem. I used Putty to connect to the Raspberry PI then searched for LatestImage.jpg.
Linux find utility displaying the location of the downloaded file
This post was about selecting the tooling I’m comfortable with and configuring my development environment so they work well together. The next step will be using Open Network Video Interface Forum (ONVIF) to discover, determine the capabilities of and then control the camera (for this device just zoom and focus).
The arduino-LoRa library LoRaDuplex sample is the basis for the last in this series of posts. The LoRaDuplex sample implements a basic protocol for addressed messages. The message payload starts with the destination address(byte), source address(byte), message counter(byte), payload length(byte), and then the payload(array of bytes).
LoRaDuplex
The sample code has configuration settings for the local address and destination (address).
#include <SPI.h> // include libraries
#include <LoRa.h>
const int csPin = 10; // LoRa radio chip select
const int resetPin = 9; // LoRa radio reset
const int irqPin = 2; // change for your board; must be a hardware interrupt pin
String outgoing; // outgoing message
byte msgCount = 0; // count of outgoing messages
byte localAddress = 0xAA; // address of this device
byte destination = 0x0; // destination to send to
long lastSendTime = 0; // last send time
int interval = 2000; // interval between sends
void setup() {
Serial.begin(9600); // initialize serial
while (!Serial);
Serial.println("LoRa Duplex");
// override the default CS, reset, and IRQ pins (optional)
LoRa.setPins(csPin, resetPin, irqPin);// set CS, reset, IRQ pin
if (!LoRa.begin(915E6)) { // initialize ratio at 915 MHz
Serial.println("LoRa init failed. Check your connections.");
while (true); // if failed, do nothing
}
LoRa.enableCrc();
Serial.println("LoRa init succeeded.");
}
void loop() {
if (millis() - lastSendTime > interval) {
String message = "HeLoRa World!"; // send a message
sendMessage(message);
Serial.println("Sending " + message);
lastSendTime = millis(); // timestamp the message
interval = random(2000) + 29000; // 2-3 seconds
}
// parse for a packet, and call onReceive with the result:
onReceive(LoRa.parsePacket());
}
void sendMessage(String outgoing) {
LoRa.beginPacket(); // start packet
LoRa.write(destination); // add destination address
LoRa.write(localAddress); // add sender address
LoRa.write(msgCount); // add message ID
LoRa.write(outgoing.length()); // add payload length
LoRa.print(outgoing); // add payload
LoRa.endPacket(); // finish packet and send it
msgCount++; // increment message ID
}
void onReceive(int packetSize) {
if (packetSize == 0) return; // if there's no packet, return
// read packet header bytes:
int recipient = LoRa.read(); // recipient address
byte sender = LoRa.read(); // sender address
byte incomingMsgId = LoRa.read(); // incoming msg ID
byte incomingLength = LoRa.read(); // incoming msg length
String incoming = "";
while (LoRa.available()) {
incoming += (char)LoRa.read();
}
if (incomingLength != incoming.length()) { // check length for error
Serial.println("error: message length does not match length");
return; // skip rest of function
}
// if the recipient isn't this device or broadcast,
if (recipient != localAddress && recipient != 0xFF) {
Serial.println("This message is not for me.");
return; // skip rest of function
}
// if message is for this device, or broadcast, print details:
Serial.println("Received from: 0x" + String(sender, HEX));
Serial.println("Sent to: 0x" + String(recipient, HEX));
Serial.println("Message ID: " + String(incomingMsgId));
Serial.println("Message length: " + String(incomingLength));
Serial.println("Message: " + incoming);
Serial.println("RSSI: " + String(LoRa.packetRssi()));
Serial.println("Snr: " + String(LoRa.packetSnr()));
Serial.println();
}
Arduino Monitor displaying information about the messages sent and received by the Duplex sample
static void Main(string[] args)
{
int messageCount = 1;
sX127XDevice.Initialise(
SX127XDevice.RegOpModeMode.ReceiveContinuous,
915000000.0,
powerAmplifier: SX127XDevice.PowerAmplifier.PABoost,
#if LORA_SENDER // From the Arduino point of view
rxDoneignoreIfCrcMissing: false
#endif
#if LORA_RECEIVER // From the Arduino point of view, don't actually need this as already inverted
invertIQTX: true
#endif
#if LORA_SET_SYNCWORD
syncWord: 0xF3,
invertIQTX: true,
rxDoneignoreIfCrcMissing: false
#endif
#if LORA_SET_SPREAD
spreadingFactor: SX127XDevice.RegModemConfig2SpreadingFactor._256ChipsPerSymbol,
invertIQTX: true,
rxDoneignoreIfCrcMissing: false
#endif
#if LORA_SIMPLE_NODE // From the Arduino point of view
invertIQTX: false,
rxDoneignoreIfCrcMissing: false
#endif
#if LORA_SIMPLE_GATEWAY // From the Arduino point of view
invertIQRX: true,
rxDoneignoreIfCrcMissing: false
#endif
#if LORA_DUPLEX
rxPayloadCrcOn: true
#endif
);
#if DEBUG
sX127XDevice.RegisterDump();
#endif
#if !LORA_RECEIVER
sX127XDevice.OnReceive += SX127XDevice_OnReceive;
sX127XDevice.Receive();
#endif
#if !LORA_SENDER
sX127XDevice.OnTransmit += SX127XDevice_OnTransmit;
#endif
#if LORA_SENDER
Thread.Sleep(-1);
#else
Thread.Sleep(5000);
#endif
while (true)
{
string messageText = "Hello LoRa from .NET Core! " + messageCount.ToString();
#if LORA_DUPLEX
byte[] messageBytes = new byte[messageText.Length+4];
messageBytes[0] = 0xaa;
messageBytes[1] = 0x00;
messageBytes[2] = (byte)messageCount;
messageBytes[3] = (byte)messageText.Length;
Array.Copy(UTF8Encoding.UTF8.GetBytes(messageText), 0, messageBytes, 4, messageBytes[3]);
Console.WriteLine($"{DateTime.Now:HH:mm:ss}-TX to 0x{messageBytes[0]:X2} from 0x{messageBytes[1]:X2} count {messageBytes[2]} length {messageBytes[3]} \"{messageText}\"");
#else
byte[] messageBytes = UTF8Encoding.UTF8.GetBytes(messageText);
Console.WriteLine($"{DateTime.Now:HH:mm:ss}- Length {messageBytes.Length} \"{messageText}\"");
#endif
messageCount += 1;
sX127XDevice.Send(messageBytes);
Thread.Sleep(10000);
}
}
private static void SX127XDevice_OnReceive(object sender, SX127XDevice.OnDataReceivedEventArgs e)
{
string messageText;
#if LORA_DUPLEX
if ((e.Data[0] != 0x00) && (e.Data[0] != 0xFF))
{
#if DEBUG
Console.WriteLine($"{DateTime.UtcNow:hh:mm:ss}-RX to 0x{e.Data[0]:X2} from 0x{e.Data[1]:X2} invalid address");
#endif
return;
}
// check payload not to long/short
if ((e.Data[3] + 4) != e.Data.Length)
{
Console.WriteLine($"{DateTime.UtcNow:hh:mm:ss}-RX Invalid payload");
return;
}
try
{
messageText = UTF8Encoding.UTF8.GetString(e.Data, 4, e.Data[3]);
Console.WriteLine($"{DateTime.Now:HH:mm:ss}-RX to 0x{e.Data[0]:X2} from 0x{e.Data[1]:X2} count {e.Data[2]} length {e.Data[3]} \"{messageText}\" snr {e.PacketSnr:0.0} packet rssi {e.PacketRssi}dBm rssi {e.Rssi}dBm ");
}
catch (Exception ex)
{
Console.WriteLine(ex.Message);
}
#else
try
{
messageText = UTF8Encoding.UTF8.GetString(e.Data);
Console.WriteLine($"{DateTime.Now:HH:mm:ss}-RX length {e.Data.Length} \"{messageText}\" snr {e.PacketSnr:0.0} packet rssi {e.PacketRssi}dBm rssi {e.Rssi}dBm ");
}
catch (Exception ex)
{
Console.WriteLine(ex.Message);
}
#endif
}
The inbound messages have to have a valid Cyclic Redundancy Check(CRC) and I ignore messages with an invalid payload length. The message protocol is insecure (but fine for demos) as the messages are sent as “plain text”, and the message headers/payload can be tampered with.
Summary
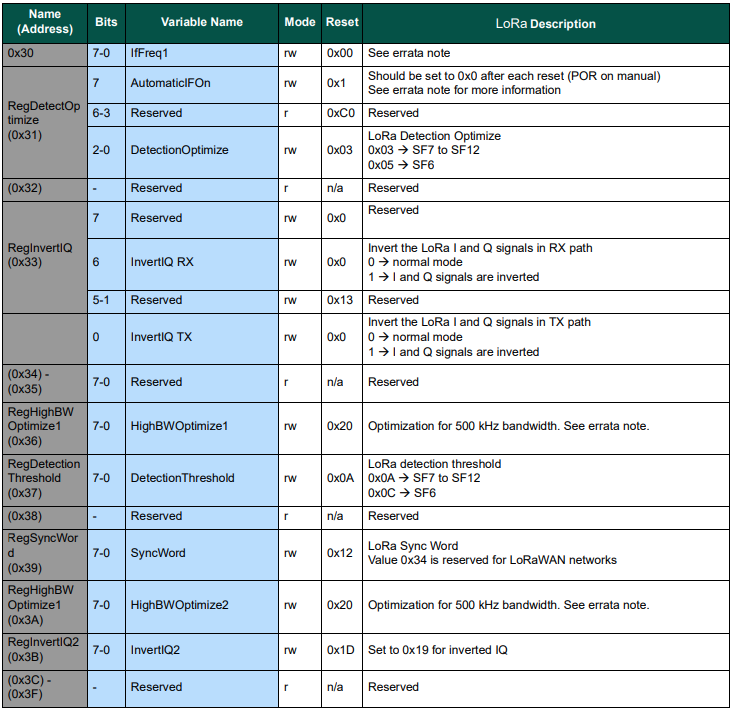
While testing the LoRaDuplex sample I found a problem with how my code managed the invertIQRX & invertIQTX flags in RegInvertIQ. I noticed the even though I was setting the InvertIQRX(bit6) and invertIQTX(bit0) flags correctly messages weren’t getting delivered.
Semtech SX127X data sheet RegInvertQ and RegInvertQ2 documetnation
After looking at my code I realised I wasn’t configuring the RegInvertIQ properly because bits 1-5 were getting set to 0x0 (initially I had byte regInvertIQValue = 0) rather than 0x13(regInvertIQValue = RegInvertIdDefault)
int messageCount = 1;
sX127XDevice.Initialise(
SX127XDevice.RegOpModeMode.ReceiveContinuous,
915000000.0,
powerAmplifier: SX127XDevice.PowerAmplifier.PABoost,
// outputPower: 5, outputPower: 20, outputPower:23,
//powerAmplifier: SX127XDevice.PowerAmplifier.Rfo,
//outputPower:-1, outputPower: 14,
#if LORA_SENDER // From the Arduino point of view
rxDoneignoreIfCrcMissing: false
#endif
#if LORA_RECEIVER // From the Arduino point of view, don't actually need this as already inverted
invertIQTX: true
#endif
#if LORA_SET_SYNCWORD
syncWord: 0xF3,
invertIQTX: true,
rxDoneignoreIfCrcMissing: false
#endif
#if LORA_SET_SPREAD
spreadingFactor: SX127XDevice.RegModemConfig2SpreadingFactor._256ChipsPerSymbol,
invertIQTX: true,
rxDoneignoreIfCrcMissing: false
#endif
#if LORA_SIMPLE_NODE // From the Arduino point of view
invertIQTX: false,
rxDoneignoreIfCrcMissing: false
#endif
#if LORA_SIMPLE_GATEWAY // From the Arduino point of view
invertIQRX: true,
rxDoneignoreIfCrcMissing: false
#endif
);
#if DEBUG
sX127XDevice.RegisterDump();
#endif
#if !LORA_RECEIVER
sX127XDevice.OnReceive += SX127XDevice_OnReceive;
sX127XDevice.Receive();
#endif
#if !LORA_SENDER
sX127XDevice.OnTransmit += SX127XDevice_OnTransmit;
#endif
#if LORA_SENDER
Thread.Sleep(-1);
#else
Thread.Sleep(5000);
#endif
while (true)
{
string messageText = "Hello LoRa from .NET Core! " + messageCount.ToString();
byte[] messageBytes = UTF8Encoding.UTF8.GetBytes(messageText);
Console.WriteLine($"{DateTime.Now:HH:mm:ss}- Length {messageBytes.Length} \"{messageText}\"");
messageCount += 1;
sX127XDevice.Send(messageBytes);
Thread.Sleep(10000);
}
}
Summary
While testing the LoRaReceiver sample I found a problem with how my code managed the transmit power by accidentally commenting out the “paBoost: true” parameter of the initialise method. When I did this the Seeeduino V4.2 and Dragino Shield stopped receiving messages.
I had assumed a user could configure the the output power using the initialise method but that was difficult/possible. After some digging I found that I needed to use RegPAConfigPADac and PABoost (I need to find a device which uses RFO for testing). So I removed several of the configuration parameters from the Intialise method and replaced them with one called outputPower. I then re-read the SX127X data sheet and had a look at some other libraries.
void RH_RF95::setTxPower(int8_t power, bool useRFO)
{
// Sigh, different behaviours depending on whther the module use PA_BOOST or the RFO pin
// for the transmitter output
if (useRFO)
{
if (power > 14)
power = 14;
if (power < -1)
power = -1;
spiWrite(RH_RF95_REG_09_PA_CONFIG, RH_RF95_MAX_POWER | (power + 1));
}
else
{
if (power > 23)
power = 23;
if (power < 5)
power = 5;
// For RH_RF95_PA_DAC_ENABLE, manual says '+20dBm on PA_BOOST when OutputPower=0xf'
// RH_RF95_PA_DAC_ENABLE actually adds about 3dBm to all power levels. We will us it
// for 21, 22 and 23dBm
if (power > 20)
{
spiWrite(RH_RF95_REG_4D_PA_DAC, RH_RF95_PA_DAC_ENABLE);
power -= 3;
}
else
{
spiWrite(RH_RF95_REG_4D_PA_DAC, RH_RF95_PA_DAC_DISABLE);
}
// RFM95/96/97/98 does not have RFO pins connected to anything. Only PA_BOOST
// pin is connected, so must use PA_BOOST
// Pout = 2 + OutputPower.
// The documentation is pretty confusing on this topic: PaSelect says the max power is 20dBm,
// but OutputPower claims it would be 17dBm.
// My measurements show 20dBm is correct
spiWrite(RH_RF95_REG_09_PA_CONFIG, RH_RF95_PA_SELECT | (power-5));
}
}
The LoRa Shield Arduino library has two methods setPower(char p) and setPowerNum(uint8_t pow)
/*
Function: Sets the signal power indicated as input to the module.
Returns: Integer that determines if there has been any error
state = 2 --> The command has not been executed
state = 1 --> There has been an error while executing the command
state = 0 --> The command has been executed with no errors
state = -1 --> Forbidden command for this protocol
Parameters:
pow: power option to set in configuration. The input value range is from
0 to 14 dBm.
*/
int8_t SX1278::setPowerNum(uint8_t pow)
{
byte st0;
int8_t state = 2;
byte value = 0x00;
#if (SX1278_debug_mode > 1)
Serial.println();
Serial.println(F("Starting 'setPower'"));
#endif
st0 = readRegister(REG_OP_MODE); // Save the previous status
if( _modem == LORA )
{ // LoRa Stdby mode to write in registers
writeRegister(REG_OP_MODE, LORA_STANDBY_MODE);
}
else
{ // FSK Stdby mode to write in registers
writeRegister(REG_OP_MODE, FSK_STANDBY_MODE);
}
if ( (pow >= 2) && (pow <= 20) )
{ // Pout= 17-(15-OutputPower) = OutputPower+2
if ( pow <= 17 ) {
writeRegister(REG_PA_DAC, 0x84);
pow = pow - 2;
} else { // Power > 17dbm -> Power = 20dbm
writeRegister(REG_PA_DAC, 0x87);
pow = 15;
}
_power = pow;
}
else
{
state = -1;
#if (SX1278_debug_mode > 1)
Serial.println(F("## Power value is not valid ##"));
Serial.println();
#endif
}
writeRegister(REG_PA_CONFIG, _power); // Setting output power value
value = readRegister(REG_PA_CONFIG);
if( value == _power )
{
state = 0;
#if (SX1278_debug_mode > 1)
Serial.println(F("## Output power has been successfully set ##"));
Serial.println();
#endif
}
else
{
state = 1;
}
writeRegister(REG_OP_MODE, st0); // Getting back to previous status
return state;
}
The SEMTECH library(V2.1.0) manages sleeping the device, reading the existing configuration and updating it as required which was a bit more functionality that I wanted.
All the of the examples I looked at were different and some had manual tweaks, others I have not included were just wrong. I have based my beta version on a hybrid of the Arduino-LoRa, RadioHead and Semtech libraries. I need to test my code and confirm that I have the limits and offsets correct for the PABoost and RFO modes.
// RegPaDac more power
[Flags]
public enum RegPaDac
{
Normal = 0b01010100,
Boost = 0b01010111,
}
private const byte RegPaDacPABoostThreshold = 20;
// Validate the OutputPower
if (powerAmplifier == PowerAmplifier.Rfo)
{
if ((outputPower < OutputPowerRfoMin) || (outputPower > OutputPowerRfoMax))
{
throw new ArgumentException($"outputPower must be between {OutputPowerRfoMin} and {OutputPowerRfoMax}", nameof(outputPower));
}
}
if (powerAmplifier == PowerAmplifier.PABoost)
{
if ((outputPower < OutputPowerPABoostMin) || (outputPower > OutputPowerPABoostMax))
{
throw new ArgumentException($"outputPower must be between {OutputPowerPABoostMin} and {OutputPowerPABoostMax}", nameof(outputPower));
}
}
if (( powerAmplifier != PowerAmplifierDefault) || (outputPower != OutputPowerDefault))
{
byte regPAConfigValue = RegPAConfigMaxPowerMax;
if (powerAmplifier == PowerAmplifier.Rfo)
{
regPAConfigValue |= RegPAConfigPASelectRfo;
regPAConfigValue |= (byte)(outputPower + 1);
this.WriteByte((byte)Registers.RegPAConfig, regPAConfigValue);
}
if (powerAmplifier == PowerAmplifier.PABoost)
{
regPAConfigValue |= RegPAConfigPASelectPABoost;
if (outputPower > RegPaDacPABoostThreshold)
{
this.WriteByte((byte)Registers.RegPaDac, (byte)RegPaDac.Boost);
regPAConfigValue |= (byte)(outputPower - 8);
this.WriteByte((byte)Registers.RegPAConfig, regPAConfigValue);
}
else
{
this.WriteByte((byte)Registers.RegPaDac, (byte)RegPaDac.Normal);
regPAConfigValue |= (byte)(outputPower - 5);
this.WriteByte((byte)Registers.RegPAConfig, regPAConfigValue);
}
}
}
The arduino-LoRa library comes with a number of samples showing how to use its functionality. The LoRaSender and LoRaReceiver samples show the bare minimum of code required to send and receive messages.
LoRaSender
This sample uses all default settings except for frequency
static void Main(string[] args)
{
int messageCount = 1;
sX127XDevice.Initialise(
SX127XDevice.RegOpModeMode.ReceiveContinuous,
915000000.0,
powerAmplifier: SX127XDevice.PowerAmplifier.PABoost,
#if LORA_SENDER // From the Arduino point of view
rxDoneignoreIfCrcMissing: false
#endif
#if LORA_RECEIVER // From the Arduino point of view, don't actually need this as already inverted
invertIQTX: true
#endif
#if LORA_SET_SYNCWORD
syncWord: 0xF3,
invertIQTX: true,
rxDoneignoreIfCrcMissing: false
#endif
#if LORA_SET_SPREAD
spreadingFactor: SX127XDevice.RegModemConfig2SpreadingFactor._256ChipsPerSymbol,
invertIQTX: true,
rxDoneignoreIfCrcMissing: false
#endif
);
#if DEBUG
sX127XDevice.RegisterDump();
#endif
#if LORA_SENDER
sX127XDevice.OnReceive += SX127XDevice_OnReceive;
sX127XDevice.Receive();
#endif
#if LORA_RECEIVER
sX127XDevice.OnTransmit += SX127XDevice_OnTransmit;
#endif
#if LORA_SENDER
Thread.Sleep(-1);
#else
Thread.Sleep(5000);
#endif
while (true)
{
string messageText = "Hello LoRa from .NET Core! " + messageCount.ToString();
byte[] messageBytes = UTF8Encoding.UTF8.GetBytes(messageText);
Console.WriteLine($"{DateTime.Now:HH:mm:ss}- Length {messageBytes.Length} \"{messageText}\"");
sX127XDevice.Send(messageBytes);
messageCount += 1;
Thread.Sleep(10000);
}
}
Summary
While testing the LoRaReceiver sample I found a problem with how my code managed the RegOpMode register LoRa status value. In previous versions of the code I used RegOpModeModeDefault to manage status when the ProcessTxDone(byte IrqFlags) method completed and Receive() was called.
I had assumed that that the device would always be set with SetMode(RegOpModeModeDefault) but RegOpModeModeDefault was always RegOpModeMode.Sleep.
The arduino-LoRa library comes with a number of samples showing how to configure a SX127X device. The LoRaSetSpread sample sets the RegModemtConfig2 (masking out previous CodingRate and ImplicitHeaderModeOn with 0xFF) to configure spreading Factor (bits 4-7) to 8 which is 256 chips/symbol.
..
void setup() {
Serial.begin(9600); // initialize serial
while (!Serial);
Serial.println("LoRa Duplex - Set spreading factor");
// override the default CS, reset, and IRQ pins (optional)
LoRa.setPins(csPin, resetPin, irqPin); // set CS, reset, IRQ pin
if (!LoRa.begin(915E6)) { // initialize ratio at 915 MHz
Serial.println("LoRa init failed. Check your connections.");
while (true); // if failed, do nothing
}
LoRa.setSpreadingFactor(8); // ranges from 6-12,default 7 see API docs
Serial.println("LoRa init succeeded.");
}
In my library I use an enumeration to represent the different spreading factors to make configuration easier for humans. (the _ prefix is due to the C# language syntax)
The SX127X.NetCore only sets the spreadingFactor, symbolTimeout, txContinuousMode, or rxPayloadCrcOn registers if any of them is different from their defaults.
// Set regModemConfig2 if any of the settings not defaults
if ((spreadingFactor != RegModemConfig2SpreadingFactorDefault) || (txContinuousMode != false) | (rxPayloadCrcOn != false) || (symbolTimeout != SymbolTimeoutDefault))
{
byte RegModemConfig2Value = (byte)spreadingFactor;
if (txContinuousMode)
{
RegModemConfig2Value |= RegModemConfig2TxContinuousModeOn;
}
if (rxPayloadCrcOn)
{
RegModemConfig2Value |= RegModemConfig2RxPayloadCrcOn;
}
// Get the MSB of SymbolTimeout
byte[] symbolTimeoutBytes = BitConverter.GetBytes(symbolTimeout);
// Only the zeroth & second bit of byte matter
symbolTimeoutBytes[1] &= SymbolTimeoutMsbMask;
RegModemConfig2Value |= symbolTimeoutBytes[1];
this.WriteByte((byte)Registers.RegModemConfig2, RegModemConfig2Value);
}
I modified the SX127X.NetCoreSX127XLoRaDeviceClient to change the SpreadingFactor to _256ChipsPerSymbol (0b10000000) to match the Arduino client.
Register dump
Register 0x01 - Value 0X85 - Bits 10000101
Register 0x02 - Value 0X1a - Bits 00011010
Register 0x03 - Value 0X0b - Bits 00001011
Register 0x04 - Value 0X00 - Bits 00000000
Register 0x05 - Value 0X52 - Bits 01010010
Register 0x06 - Value 0Xe4 - Bits 11100100
Register 0x07 - Value 0Xc0 - Bits 11000000
Register 0x08 - Value 0X00 - Bits 00000000
Register 0x09 - Value 0Xcf - Bits 11001111
Register 0x0a - Value 0X09 - Bits 00001001
Register 0x0b - Value 0X2b - Bits 00101011
Register 0x0c - Value 0X20 - Bits 00100000
Register 0x0d - Value 0X00 - Bits 00000000
Register 0x0e - Value 0X80 - Bits 10000000
Register 0x0f - Value 0X00 - Bits 00000000
Register 0x10 - Value 0X00 - Bits 00000000
Register 0x11 - Value 0X00 - Bits 00000000
Register 0x12 - Value 0X00 - Bits 00000000
Register 0x13 - Value 0X00 - Bits 00000000
Register 0x14 - Value 0X00 - Bits 00000000
Register 0x15 - Value 0X00 - Bits 00000000
Register 0x16 - Value 0X00 - Bits 00000000
Register 0x17 - Value 0X00 - Bits 00000000
Register 0x18 - Value 0X04 - Bits 00000100
Register 0x19 - Value 0X00 - Bits 00000000
Register 0x1a - Value 0X00 - Bits 00000000
Register 0x1b - Value 0X3d - Bits 00111101
Register 0x1c - Value 0X00 - Bits 00000000
Register 0x1d - Value 0X72 - Bits 01110010
Register 0x1e - Value 0X80 - Bits 10000000
Register 0x1f - Value 0X64 - Bits 01100100
Register 0x20 - Value 0X00 - Bits 00000000
Register 0x21 - Value 0X08 - Bits 00001000
Register 0x22 - Value 0X01 - Bits 00000001
Register 0x23 - Value 0Xff - Bits 11111111
Register 0x24 - Value 0X00 - Bits 00000000
Register 0x25 - Value 0X00 - Bits 00000000
Register 0x26 - Value 0X04 - Bits 00000100
Register 0x27 - Value 0X00 - Bits 00000000
Register 0x28 - Value 0X00 - Bits 00000000
Register 0x29 - Value 0X00 - Bits 00000000
Register 0x2a - Value 0X00 - Bits 00000000
Register 0x2b - Value 0X00 - Bits 00000000
Register 0x2c - Value 0X0d - Bits 00001101
Register 0x2d - Value 0X50 - Bits 01010000
Register 0x2e - Value 0X14 - Bits 00010100
Register 0x2f - Value 0X45 - Bits 01000101
Register 0x30 - Value 0X55 - Bits 01010101
Register 0x31 - Value 0Xc3 - Bits 11000011
Register 0x32 - Value 0X05 - Bits 00000101
Register 0x33 - Value 0X37 - Bits 00110111
Register 0x34 - Value 0X1c - Bits 00011100
Register 0x35 - Value 0X0a - Bits 00001010
Register 0x36 - Value 0X03 - Bits 00000011
Register 0x37 - Value 0X0a - Bits 00001010
Register 0x38 - Value 0X42 - Bits 01000010
Register 0x39 - Value 0X12 - Bits 00010010
Register 0x3a - Value 0X49 - Bits 01001001
Register 0x3b - Value 0X19 - Bits 00011001
Register 0x3c - Value 0X00 - Bits 00000000
Register 0x3d - Value 0Xaf - Bits 10101111
Register 0x3e - Value 0X00 - Bits 00000000
Register 0x3f - Value 0X00 - Bits 00000000
Register 0x40 - Value 0X00 - Bits 00000000
Register 0x41 - Value 0X00 - Bits 00000000
Register 0x42 - Value 0X12 - Bits 00010010
Loaded '/usr/lib/dotnet/shared/Microsoft.NETCore.App/5.0.4/System.Text.Encoding.Extensions.dll'. Skipped loading symbols. Module is optimized and the debugger option 'Just My Code' is enabled.
Loaded '/usr/lib/dotnet/shared/Microsoft.NETCore.App/5.0.4/Microsoft.Win32.Primitives.dll'. Skipped loading symbols. Module is optimized and the debugger option 'Just My Code' is enabled.
10:04:22-RX PacketSnr 11.8 Packet RSSI -45dBm RSSI -109dBm 15 byte message "HeLoRa World! 2"
10:04:31-RX PacketSnr 11.5 Packet RSSI -45dBm RSSI -104dBm 15 byte message "HeLoRa World! 4"
10:04:32-TX To 0x48 From 0x65 Count 108 28 bytes message Hello LoRa from .NET Core! 1
10:04:32-TX Done
10:04:41-RX PacketSnr 12.0 Packet RSSI -45dBm RSSI -104dBm 15 byte message "HeLoRa World! 6"
10:04:42-TX To 0x48 From 0x65 Count 108 28 bytes message Hello LoRa from .NET Core! 2
10:04:42-TX Done
This matched the Arduino serial monitor output.
Summary
The LoRaSetSpread sample illustrates how the SX127X.NetCore library modifies register(s) only if a value specified in the Initialise method parameter list is different from the default.
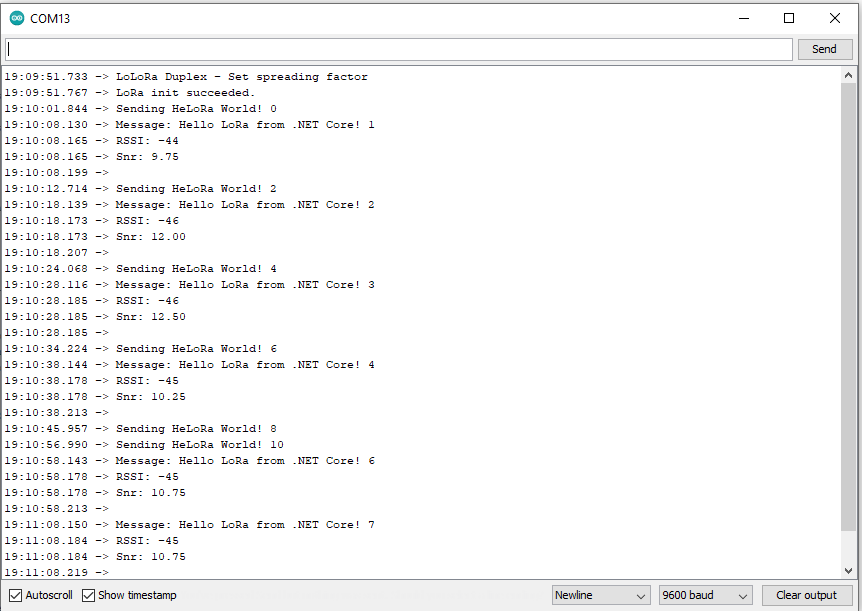
The arduino-LoRa library comes with a number of samples showing how to configure a SX127X device. The LoRaSetSyncWord sample sets the RegSyncWord register to 0x53
SX127X registers including RegSyncWord
...
void setup() {
Serial.begin(9600); // initialize serial
while (!Serial);
Serial.println("LoRa Duplex - Set sync word");
// override the default CS, reset, and IRQ pins (optional)
LoRa.setPins(csPin, resetPin, irqPin);// set CS, reset, IRQ pin
if (!LoRa.begin(915E6)) { // initialize ratio at 915 MHz
Serial.println("LoRa init failed. Check your connections.");
while (true); // if failed, do nothing
}
LoRa.setSyncWord(0xF3); // ranges from 0-0xFF, default 0x34, see API docs
Serial.println("LoRa init succeeded.");
}
...
In the Visual Studio output window I could see that RegSyncWord(0x39) was set to 0x53.
...
Loaded '/usr/lib/dotnet/shared/Microsoft.NETCore.App/5.0.4/System.Memory.dll'. Skipped loading symbols. Module is optimized and the debugger option 'Just My Code' is enabled.
Register dump
Register 0x01 - Value 0X85 - Bits 10000101
Register 0x02 - Value 0X1a - Bits 00011010
Register 0x03 - Value 0X0b - Bits 00001011
Register 0x04 - Value 0X00 - Bits 00000000
Register 0x05 - Value 0X52 - Bits 01010010
Register 0x06 - Value 0Xe4 - Bits 11100100
Register 0x07 - Value 0Xc0 - Bits 11000000
Register 0x08 - Value 0X00 - Bits 00000000
Register 0x09 - Value 0Xcf - Bits 11001111
Register 0x0a - Value 0X09 - Bits 00001001
Register 0x0b - Value 0X2b - Bits 00101011
Register 0x0c - Value 0X20 - Bits 00100000
Register 0x0d - Value 0X00 - Bits 00000000
Register 0x0e - Value 0X80 - Bits 10000000
Register 0x0f - Value 0X00 - Bits 00000000
Register 0x10 - Value 0X00 - Bits 00000000
Register 0x11 - Value 0X00 - Bits 00000000
Register 0x12 - Value 0X00 - Bits 00000000
Register 0x13 - Value 0X00 - Bits 00000000
Register 0x14 - Value 0X00 - Bits 00000000
Register 0x15 - Value 0X00 - Bits 00000000
Register 0x16 - Value 0X00 - Bits 00000000
Register 0x17 - Value 0X00 - Bits 00000000
Register 0x18 - Value 0X04 - Bits 00000100
Register 0x19 - Value 0X00 - Bits 00000000
Register 0x1a - Value 0X00 - Bits 00000000
Register 0x1b - Value 0X39 - Bits 00111001
Register 0x1c - Value 0X00 - Bits 00000000
Register 0x1d - Value 0X72 - Bits 01110010
Register 0x1e - Value 0X74 - Bits 01110100
Register 0x1f - Value 0X64 - Bits 01100100
Register 0x20 - Value 0X00 - Bits 00000000
Register 0x21 - Value 0X08 - Bits 00001000
Register 0x22 - Value 0X01 - Bits 00000001
Register 0x23 - Value 0Xff - Bits 11111111
Register 0x24 - Value 0X00 - Bits 00000000
Register 0x25 - Value 0X00 - Bits 00000000
Register 0x26 - Value 0X04 - Bits 00000100
Register 0x27 - Value 0X00 - Bits 00000000
Register 0x28 - Value 0X00 - Bits 00000000
Register 0x29 - Value 0X00 - Bits 00000000
Register 0x2a - Value 0X00 - Bits 00000000
Register 0x2b - Value 0X00 - Bits 00000000
Register 0x2c - Value 0X1a - Bits 00011010
Register 0x2d - Value 0X50 - Bits 01010000
Register 0x2e - Value 0X14 - Bits 00010100
Register 0x2f - Value 0X45 - Bits 01000101
Register 0x30 - Value 0X55 - Bits 01010101
Register 0x31 - Value 0Xc3 - Bits 11000011
Register 0x32 - Value 0X05 - Bits 00000101
Register 0x33 - Value 0X37 - Bits 00110111
Register 0x34 - Value 0X1c - Bits 00011100
Register 0x35 - Value 0X0a - Bits 00001010
Register 0x36 - Value 0X03 - Bits 00000011
Register 0x37 - Value 0X0a - Bits 00001010
Register 0x38 - Value 0X42 - Bits 01000010
Register 0x39 - Value 0X53 - Bits 01010011
Register 0x3a - Value 0X49 - Bits 01001001
Register 0x3b - Value 0X19 - Bits 00011001
Register 0x3c - Value 0X00 - Bits 00000000
Register 0x3d - Value 0Xaf - Bits 10101111
Register 0x3e - Value 0X00 - Bits 00000000
Register 0x3f - Value 0X00 - Bits 00000000
Register 0x40 - Value 0X00 - Bits 00000000
Register 0x41 - Value 0X00 - Bits 00000000
Register 0x42 - Value 0X12 - Bits 00010010
Loaded '/usr/lib/dotnet/shared/Microsoft.NETCore.App/5.0.4/System.Text.Encoding.Extensions.dll'. Skipped loading symbols. Module is optimized and the debugger option 'Just My Code' is enabled.
Loaded '/usr/lib/dotnet/shared/Microsoft.NETCore.App/5.0.4/Microsoft.Win32.Primitives.dll'. Skipped loading symbols. Module is optimized and the debugger option 'Just My Code' is enabled.
18:22:42-RX PacketSnr 10.0 Packet RSSI -48dBm RSSI -104dBm 15 byte message "HeLoRa World! 0"
Sending 28 bytes message Hello LoRa from .NET Core! 1
18:22:42-TX Done
Sending 28 bytes message Hello LoRa from .NET Core! 2
18:22:52-TX Done
18:22:53-RX PacketSnr 9.8 Packet RSSI -46dBm RSSI -103dBm 15 byte message "HeLoRa World! 2"
Sending 28 bytes message Hello LoRa from .NET Core! 3
18:23:02-TX Done
18:23:04-RX PacketSnr 10.0 Packet RSSI -46dBm RSSI -104dBm 15 byte message "HeLoRa World! 4"
Sending 28 bytes message Hello LoRa from .NET Core! 4
18:23:12-TX Done
18:23:14-RX PacketSnr 9.5 Packet RSSI -46dBm RSSI -104dBm 15 byte message "HeLoRa World! 6"
Sending 28 bytes message Hello LoRa from .NET Core! 5
18:23:22-TX Done
18:23:26-RX PacketSnr 10.0 Packet RSSI -47dBm RSSI -105dBm 15 byte message "HeLoRa World! 8"
Sending 28 bytes message Hello LoRa from .NET Core! 6
18:23:32-TX Done
18:23:37-RX PacketSnr 10.0 Packet RSSI -48dBm RSSI -104dBm 16 byte message "HeLoRa World! 10"
Sending 28 bytes message Hello LoRa from .NET Core! 7
18:23:42-TX Done
18:23:48-RX PacketSnr 9.8 Packet RSSI -48dBm RSSI -104dBm 16 byte message "HeLoRa World! 12"
Sending 28 bytes message Hello LoRa from .NET Core! 8
18:23:52-TX Done
18:24:00-RX PacketSnr 12.5 Packet RSSI -48dBm RSSI -104dBm 16 byte message "HeLoRa World! 14"
Sending 28 bytes message Hello LoRa from .NET Core! 9
18:24:02-TX Done
18:24:11-RX PacketSnr 10.0 Packet RSSI -47dBm RSSI -104dBm 16 byte message "HeLoRa World! 16"
Sending 29 bytes message Hello LoRa from .NET Core! 10
18:24:12-TX Done
Sending 29 bytes message Hello LoRa from .NET Core! 11
18:24:22-TX Done
18:24:23-RX PacketSnr 9.3 Packet RSSI -49dBm RSSI -104dBm 16 byte message "HeLoRa World! 18"
Sending 29 bytes message Hello LoRa from .NET Core! 12
18:24:32-TX Done
18:24:34-RX PacketSnr 9.5 Packet RSSI -49dBm RSSI -104dBm 16 byte message "HeLoRa World! 20"
Sending 29 bytes message Hello LoRa from .NET Core! 13
18:24:42-TX Done
18:24:45-RX PacketSnr 9.3 Packet RSSI -49dBm RSSI -104dBm 16 byte message "HeLoRa World! 22"
Sending 29 bytes message Hello LoRa from .NET Core! 14
18:24:52-TX Done
The thread 0x74ab has exited with code 0 (0x0).
18:24:55-RX PacketSnr 9.5 Packet RSSI -49dBm RSSI -103dBm 16 byte message "HeLoRa World! 24"
The program 'dotnet' has exited with code 0 (0x0).
This matched the Arduino serial monitor output.
Arduino-Lora LoRaSetSyncWord serial monitor
Summary
Usually the SX127X.NetCore library modifies register(s) only if a value specified in the Initialise method parameter list is different from the default.
Some values span multiple registers e.g. frequency uses RegFrMsb, RegFrMid & RegFrLsb, and multiple options can be specified in a single register e.g. RegOpMode which complicates the code.













{kind=link}