I had been considering using the Quadcopter IMU to drive the execution of the orientation and stabilisation algorithms. The MPU 6050 has an interrupt output which can be configured to trigger when there is data available to be read etc.
I had read discussions about the maximum frequency which the Netduino & the NetMF could cope with and just wanted to check for myself. For this test I assumed that the PWM outputs (once initialised) consume little or no CPU and that with only an InterlockedIncrement in the interrupt handler that these would be the maximum possible values.

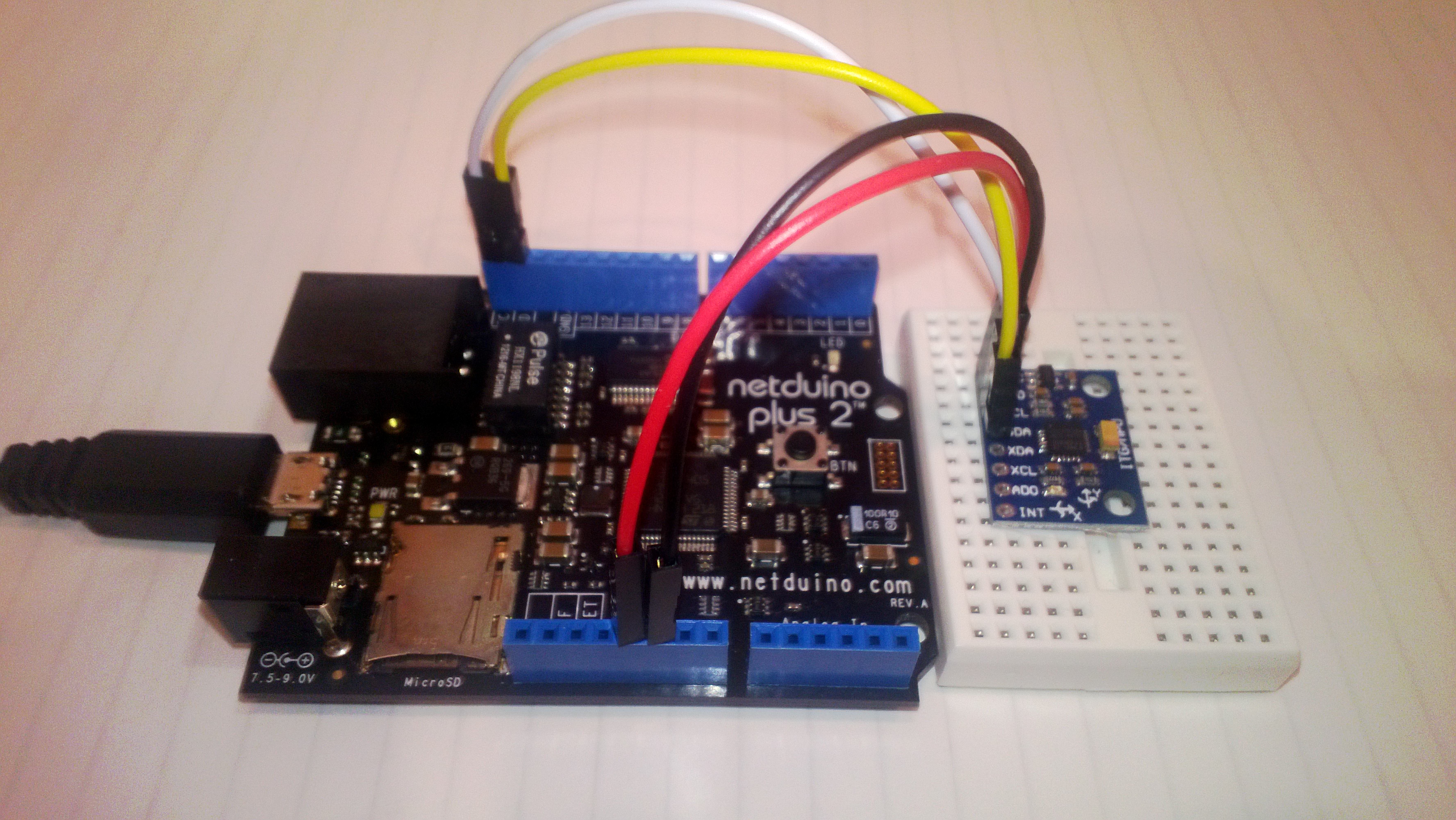
I used the onboard PWM (D3) to drive an interrupt (D1) and then had a background thread display the number calls to the interrupt handler in the last second. The button (D4) in the picture above allowed me to increase the frequency of the PWM output in 100Hz steps. The desired count and actual count where displayed using Debug.Print and the .Net Microframework deployment tool
100 101
200 107
700 453
1000 867
1500 1225
1800 1629
2100 1943
2900 2470
3200 3093
3600 3432
4000 3799
4000 4020
4000 4021
4000 4020
The counts seemed to be reasonably accurate until roughly 13KHz then there would be major memory allocation issues and the device would crash.