Infrastructure and payloads
This is the first in a series of posts about building an HTTP Integration for a The Things Network(TTN) application. I have assumed that readers are familiar with the configuration and operation of a TTN instance so I’m not going to cover that in detail.
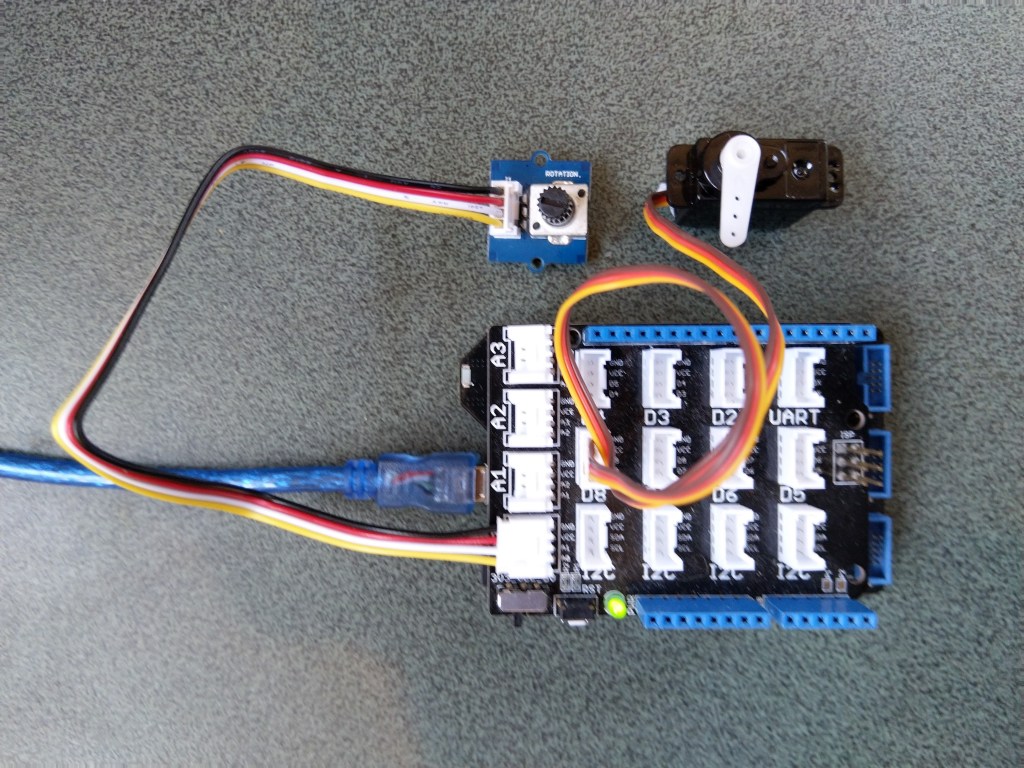
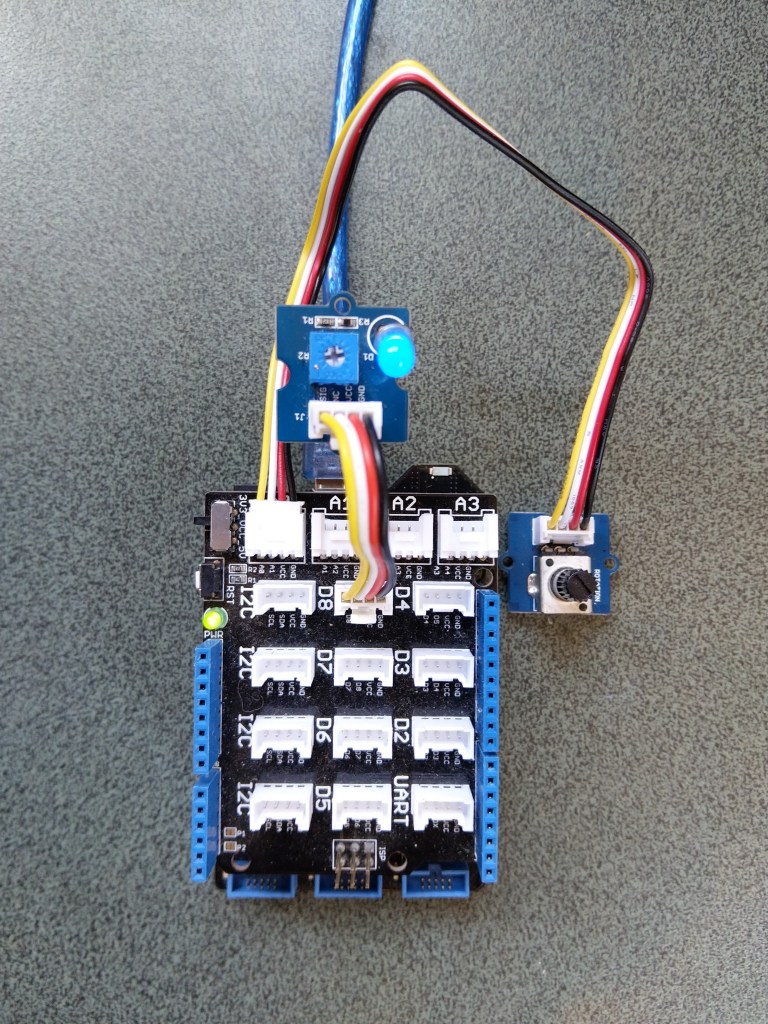
I’m using a Seeeduino LoRaWAN device as a client so I configured the sample Over the Air Activation(OTAA) application to connect to my local RAK7246 Developer gateway.
#include <LoRaWan.h>
unsigned char data[] = {0x53, 0x65, 0x65, 0x65, 0x64, 0x75, 0x69, 0x6E, 0x6F, 0x20, 0x4C, 0x6F, 0x52, 0x61, 0x57, 0x41, 0x4E};
char buffer[256];
void setup(void)
{
SerialUSB.begin(9600);
while (!SerialUSB);
lora.init();
memset(buffer, 0, 256);
lora.getVersion(buffer, 256, 1);
SerialUSB.print("Ver:");
SerialUSB.print(buffer);
memset(buffer, 0, 256);
lora.getId(buffer, 256, 1);
SerialUSB.print(buffer);
SerialUSB.print("ID:");
lora.setKey(NULL, NULL, "12345678901234567890123456789012");
lora.setId(NULL, "1234567890123456", "1234567890123456");
lora.setPort(10);
lora.setDeciveMode(LWOTAA);
lora.setDataRate(DR0, AS923);
lora.setDutyCycle(false);
lora.setJoinDutyCycle(false);
lora.setPower(14);
while (!lora.setOTAAJoin(JOIN, 10))
{
SerialUSB.println("");
}
SerialUSB.println( "Joined");
}
void loop(void)
{
bool result = false;
//result = lora.transferPacket("Hello World!", 10);
result = lora.transferPacket(data, sizeof(data));
if (result)
{
short length;
short rssi;
memset(buffer, 0, 256);
length = lora.receivePacket(buffer, 256, &rssi);
if (length)
{
SerialUSB.print("Length is: ");
SerialUSB.println(length);
SerialUSB.print("RSSI is: ");
SerialUSB.println(rssi);
SerialUSB.print("Data is: ");
for (unsigned char i = 0; i < length; i ++)
{
SerialUSB.print("0x");
SerialUSB.print(buffer[i], HEX);
SerialUSB.print(" ");
}
SerialUSB.println();
}
}
delay( 10000);
}
The SetKey and SetId parameters are not obvious and it would be much easier if there were two methods one for OTTA and the other for Activation by-Personalization(ABP).
I then built an Net Core 3.1 Web API application which had a single controller to receive messages from TTN.
[Route("[controller]")]
[ApiController]
public class Raw : ControllerBase
{
private static readonly ILog log = log4net.LogManager.GetLogger(System.Reflection.MethodBase.GetCurrentMethod().DeclaringType);
[HttpGet]
public string Index()
{
return "move along nothing to see";
}
[HttpPost]
public void PostRaw([FromBody]JsonElement body)
{
string json = JsonSerializer.Serialize(body);
log.Info(json);
}
}
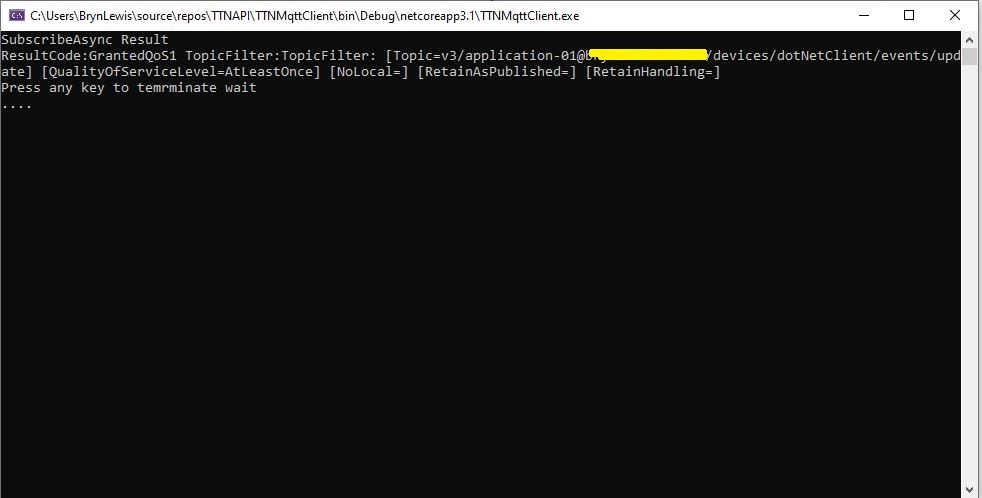
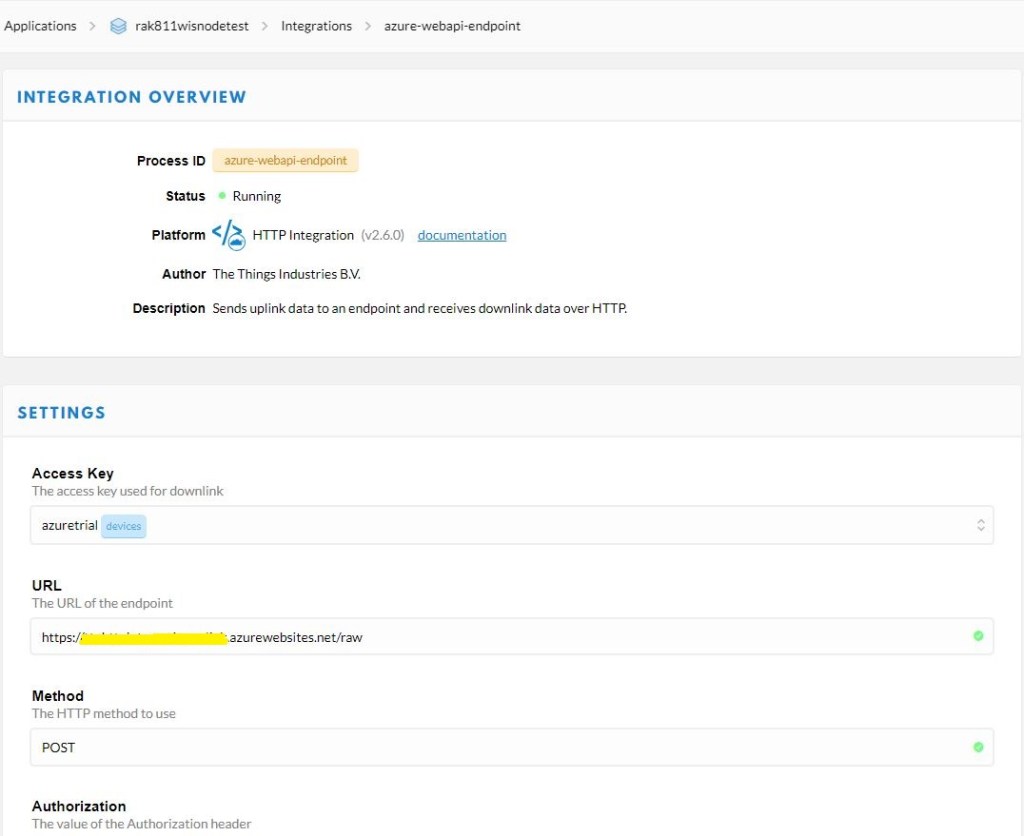
I then configured my TTN application integration to send messages to my shinny new endpoint
My controller logged events to Azure application Insights so I could see if there were any errors and inspect message payloads. The TTN developers provide sample payloads to illustrate the message format but they were a bit chunky for my initial testing.
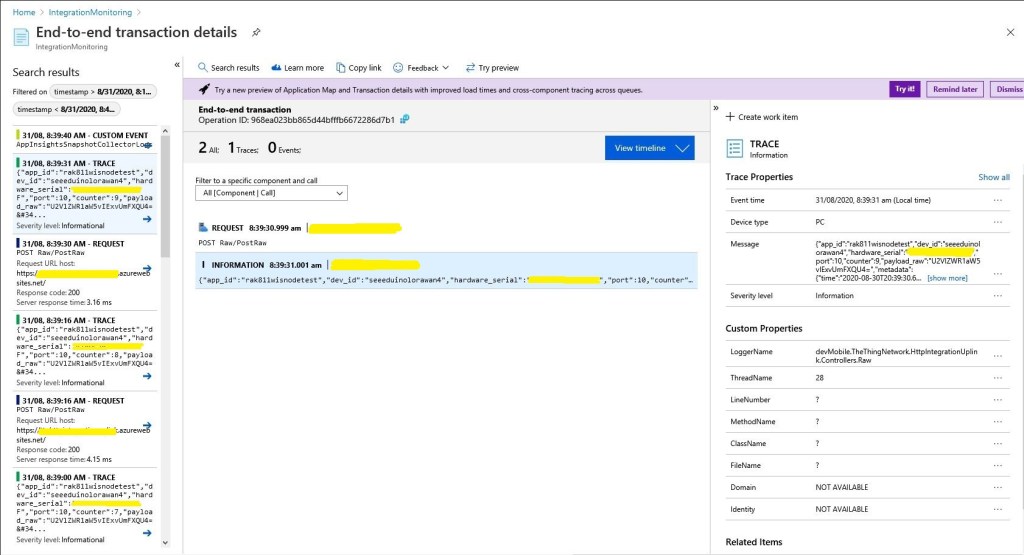
I could then inspect individual events and payloads
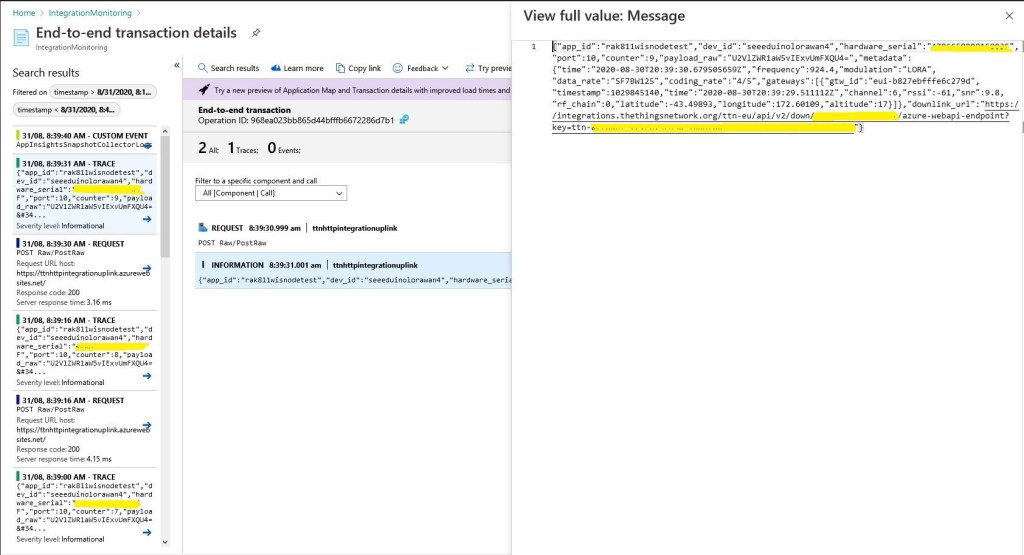
At this point I could download message payloads and save them locally.
{
"app_id": "rak811wisnodetest",
"dev_id": "rak811wisnode1",
"hardware_serial": "1234567890123456",
"port": 1,
"counter": 2,
"confirmed": true,
"payload_raw": "VGlueUNMUiBMb1JhV0FO",
"metadata": {
"time": "2020-08-26T00:50:36.182774822Z",
"frequency": 924.2,
"modulation": "LORA",
"data_rate": "SF7BW125",
"coding_rate": "4/5",
"gateways": [
{
"gtw_id": "eui-b827ebfffe6c279d",
"timestamp": 1584148244,
"time": "2020-08-26T00:50:35.012774Z",
"channel": 5,
"rssi": -63,
"snr": 9.2,
"rf_chain": 0,
"latitude": -43.49889,
"longitude": 172.60104,
"altitude": 16
}
]
},
"downlink_url": "https://integrations.thethingsnetwork.org/ttn-eu/api/v2/down/rak811wisnodetest/azure-webapi-endpoint?key=ttn-account-v2.12345678901234567_12345_1234567-dduo"
}
These were useful because I could then use a tool like Telerik Fiddler to submit messages to my application when it was running locally in the Visual Studio 2019 debugger.