In part 1 I got the wireless WiiChuck working with a plug n play setup using a SeeedStudio Grove base shield, Wii Chuck adaptor, modified 5CM cable and FEZ Lemur. The FEZ Lemur is limited to a 5VDC supply which wasn’t going to work so well with the 6VDC output of my HobbyKing HK150 ESC without some extra electronics.
GHI Electronics also sell the FEZ Panda III which has a 6VDC-9VDC voltage range and more processing power which would be useful for my next project a dual motor longboard with traction control and anti lock braking .
I also figured vibration could be a problem for the plug n play setup so I built a custom shield for my wireless Wii Chuck dual motor longboard control using an Arduino protoshield, and a Wii-Nunchuck breakout board. The shield provides a solid mount for the wireless Wii chuck dongle and power for the NetMF board from the output of the ESC.
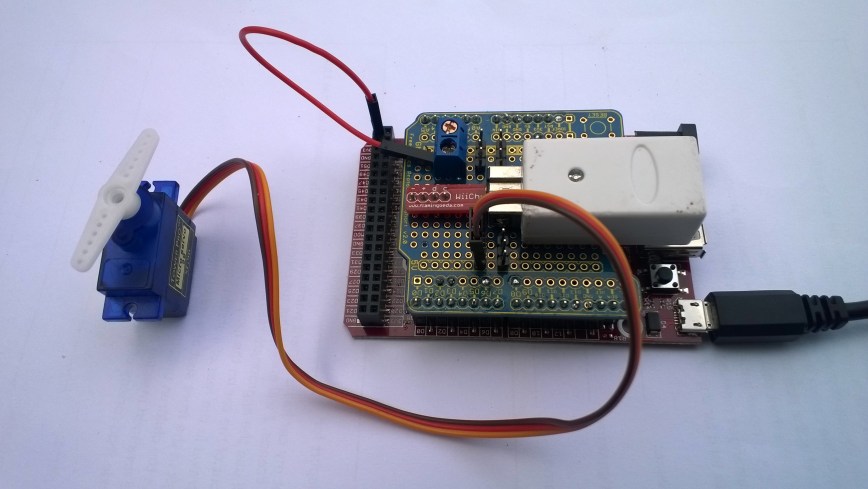
FEZ Panda II Protoshield for longboard RC Servo test
I tested the shield wiring using a Radio Control (RC) Servo so the scope of disaster was greatly reduced. (The red jumper wire is supplying 3v3 to the servo for testing)
using System;
using System.Threading;
using Microsoft.SPOT;
using Microsoft.SPOT.Hardware;
using Toolbox.NETMF.Hardware;
public class Program
{
private const int NunchukYMinimum = 0;
private const int NunchukYMaximum = 255;
private const int PWMPeriodMicroseconds = 20000;
private const int DurationMinimum = 1250;
private const int DurationMaximum = 1750;
public static void Main()
{
WiiNunchuk Nunchuk = new WiiNunchuk();
PWM pwm = new PWM(GHI.Pins.FEZPandaIII.PwmOutput.D6, PWMPeriodMicroseconds, DurationMinimum, PWM.ScaleFactor.Microseconds, false);
pwm.Start();
while (true)
{
// Reads all values
Nunchuk.Read();
Debug.Print(Nunchuk.AnalogStickX.ToString() + " " + Nunchuk.AnalogStickY.ToString());
uint duration = (uint)map(Nunchuk.AnalogStickY, NunchukYMinimum, NunchukYMaximum, DurationMinimum, DurationMaximum);
Debug.Print("Duration " + duration.ToString());
pwm.Duration = duration;
Thread.Sleep(100);
}
}
private static long map(long x, long inputMinimum, long inputMaximum, long outputMinimum, long outputMaximum)
{
return (x - inputMinimum) * (outputMaximum - outputMinimum) / (inputMaximum - inputMinimum) + outputMinimum;
}
}
I then connected the setup to my longboard ESC and it worked. (need a right angle connection for FEZ Panda III power)
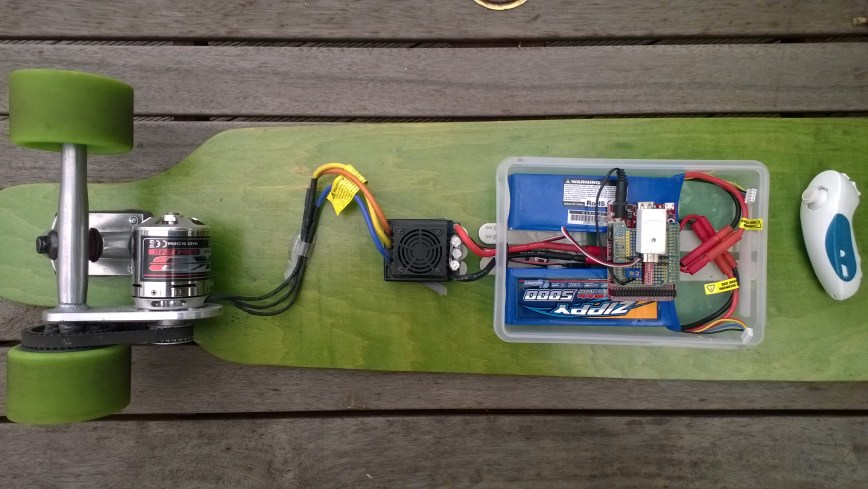
Longboard with FEZ Panda III board based controller
The proof of concept software worked, the next step is to add throttle mapping and failure mode handling e.g. loss of communications with the Wiichuck.
