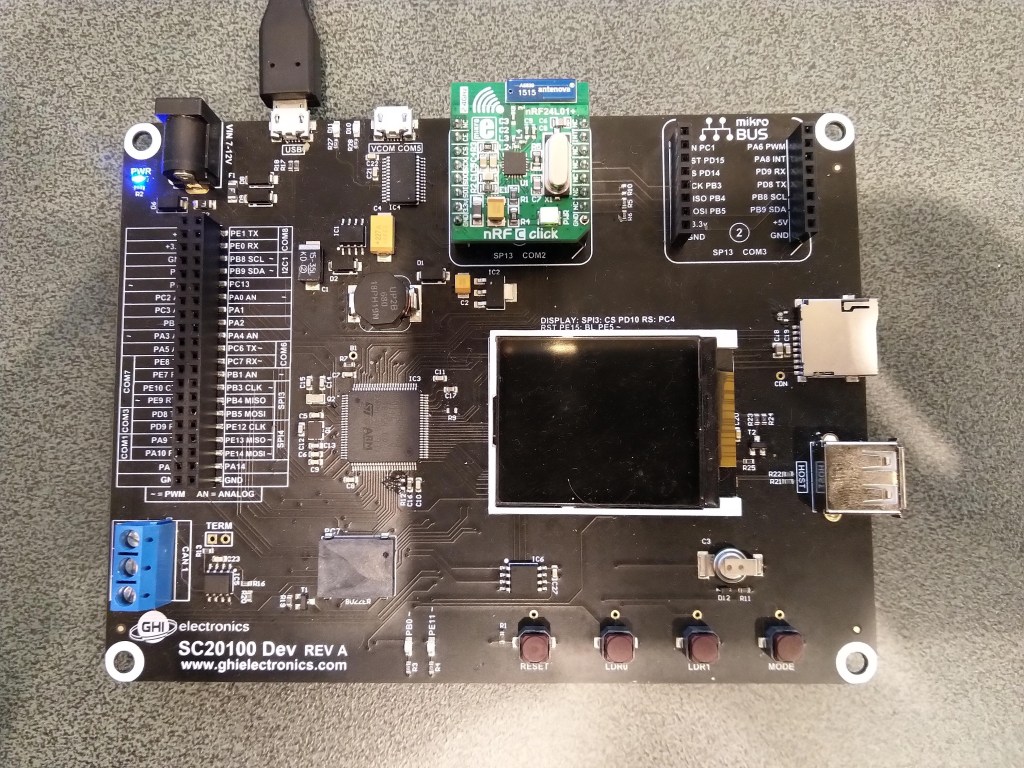
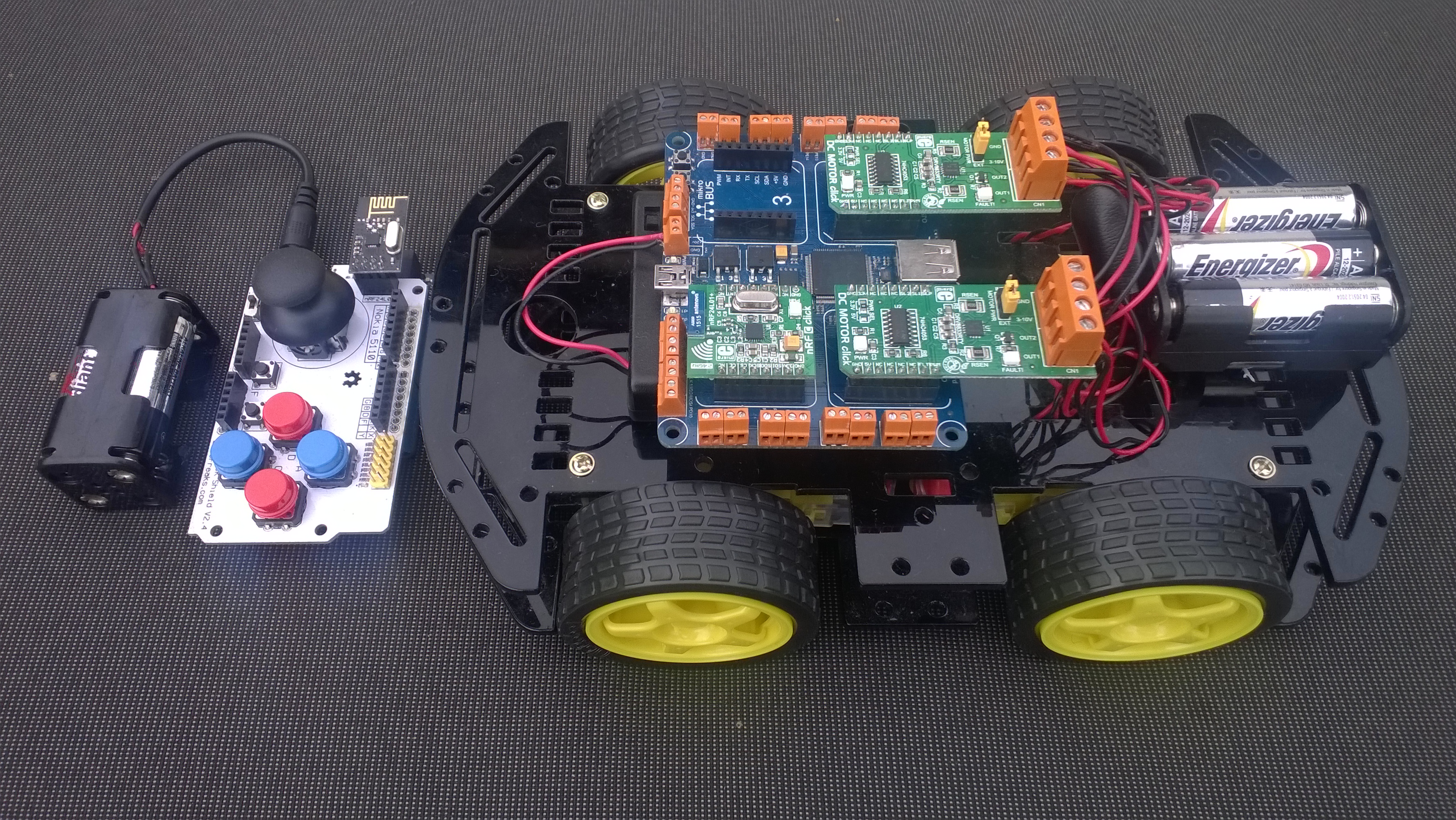
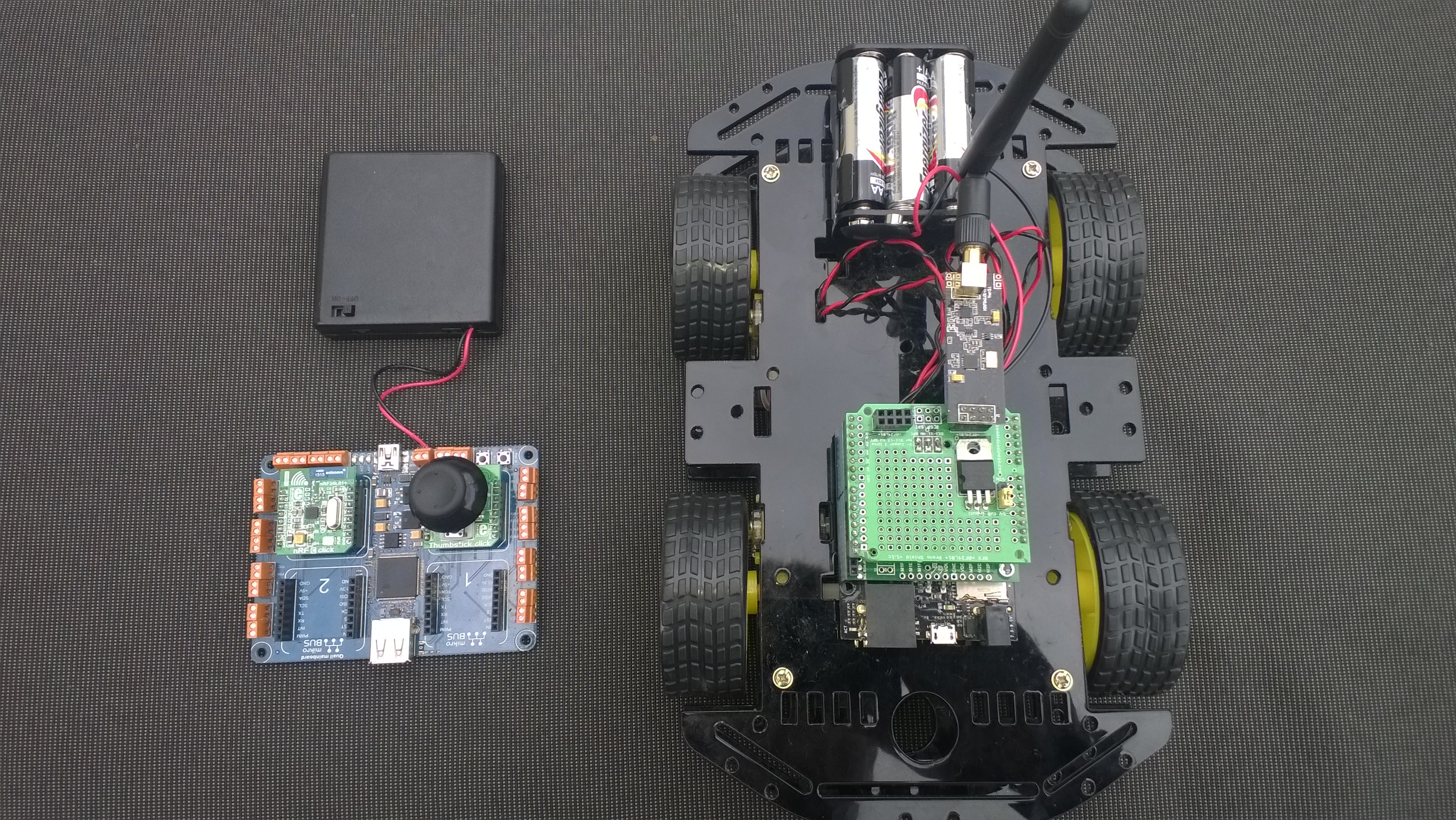
The source code of RC2 of my port GHI Electronics TinyCLR-0SV2RC1 nRF24L01 library is live on GitHub. The sample application now supports Fezduino (with embeddedcoolness.com or other Arduino shield), Fezportal and the SC2010 Dev board (with mikroe nrf24C Click, mikroe nRF24S Click or mikroenRF24T Click) .


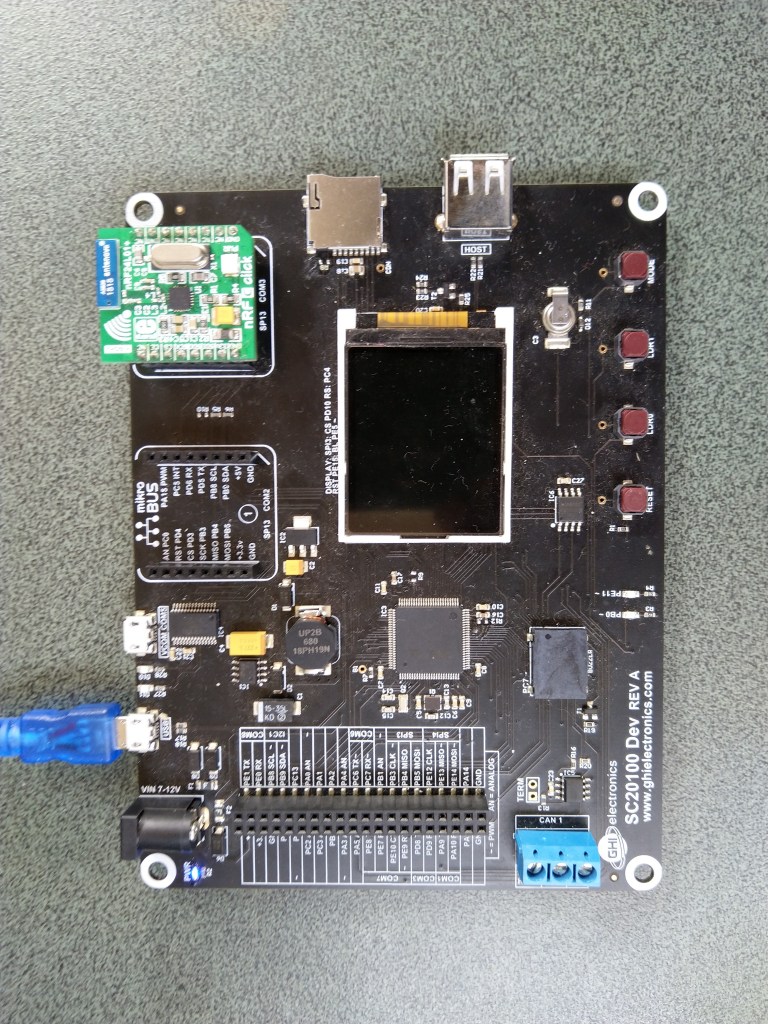
The application has gained four compile time configuration options
- TINYCLR_V2_SC20100DEV_MIKROBUS_1
- TINYCLR_V2_SC20100DEV_MIKROBUS_2
- TINYCLR_V2_FEZDUINO
- TINYCLR_V2_FEZPORTAL
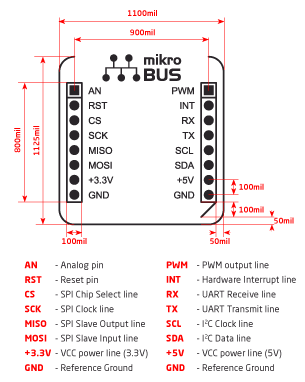
These options configure the chip enable, chip selected and interrupt pins.
//---------------------------------------------------------------------------------
// Copyright (c) May 2020, devMobile Software
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
//
// Need one of TINYCLR_V2_SC20100DEV_MIKROBUS_1/TINYCLR_V2_SC20100DEV_MIKROBUS_2/TINYCLR_V2_FEZDUINO/TINYCLR_V2_FEZPORTAL defined
//---------------------------------------------------------------------------------
namespace devMobile.IoT.FieldGateway.TinyCLRV2nRF24Client
{
using System;
using System.Diagnostics;
using System.Text;
using System.Threading;
using GHIElectronics.TinyCLR.Pins;
using Radios.RF24;
class Program
{
private const string BaseStationAddress = "Base1";
private const string DeviceAddress = "Dev01";
static void Main()
{
RF24 radio = new RF24();
byte messageCount = System.Byte.MaxValue;
try
{
radio.OnDataReceived += Radio_OnDataReceived;
radio.OnTransmitFailed += Radio_OnTransmitFailed;
radio.OnTransmitSuccess += Radio_OnTransmitSuccess;
#if TINYCLR_V2_SC20100DEV_MIKROBUS_1
radio.Initialize(SC20100.SpiBus.Spi3, SC20100.GpioPin.PD4, SC20100.GpioPin.PD3, SC20100.GpioPin.PC5);
#endif
#if TINYCLR_V2_SC20100DEV_MIKROBUS_2
radio.Initialize(SC20100.SpiBus.Spi3, SC20100.GpioPin.PD15, SC20100.GpioPin.PD14, SC20100.GpioPin.PA8);
#endif
#if TINYCLR_V2_FEZDUINO
radio.Initialize(SC20100.SpiBus.Spi6, SC20100.GpioPin.PE11, SC20100.GpioPin.PC4, SC20100.GpioPin.PA1);
#endif
#if TINYCLR_V2_FEZPORTAL
radio.Initialize(SC20100.SpiBus.Spi3, SC20100.GpioPin.PD4, SC20100.GpioPin.PC13, SC20100.GpioPin.PC2);
#endif
radio.Address = Encoding.UTF8.GetBytes(DeviceAddress);
radio.Channel = 15;
radio.PowerLevel = PowerLevel.Minimum;
radio.DataRate = DataRate.DR250Kbps;
radio.IsEnabled = true;
radio.IsAutoAcknowledge = true;
radio.IsDyanmicAcknowledge = false;
radio.IsDynamicPayload = true;
Debug.WriteLine($"Address: {Encoding.UTF8.GetString(radio.Address)}");
Debug.WriteLine($"PowerLevel: {radio.PowerLevel}");
Debug.WriteLine($"IsAutoAcknowledge: {radio.IsAutoAcknowledge}");
Debug.WriteLine($"Channel: {radio.Channel}");
Debug.WriteLine($"DataRate: {radio.DataRate}");
Debug.WriteLine($"IsDynamicAcknowledge: {radio.IsDyanmicAcknowledge}");
Debug.WriteLine($"IsDynamicPayload: {radio.IsDynamicPayload}");
Debug.WriteLine($"IsEnabled: {radio.IsEnabled}");
Debug.WriteLine($"Frequency: {radio.Frequency}");
Debug.WriteLine($"IsInitialized: {radio.IsInitialized}");
Debug.WriteLine($"IsPowered: {radio.IsPowered}");
while (true)
{
string payload = $"hello {messageCount}";
messageCount -= 1;
Debug.WriteLine($"{DateTime.UtcNow:HH:mm:ss}-TX {payload.Length} byte message {payload}");
radio.SendTo(Encoding.UTF8.GetBytes(BaseStationAddress), Encoding.UTF8.GetBytes(payload));
Thread.Sleep(30000);
}
}
catch (Exception ex)
{
Debug.WriteLine(ex.Message);
}
}
private static void Radio_OnDataReceived(byte[] data)
{
// display as hex
Debug.WriteLine($"{DateTime.UtcNow:HH:mm:ss}-RX Hex Length {data.Length} Payload {BitConverter.ToString(data)}");
// Display as Unicode
string unicodeText = Encoding.UTF8.GetString(data);
Debug.WriteLine($"{DateTime.UtcNow:HH:mm:ss}-RX Unicode Length {unicodeText.Length} Unicode text {unicodeText}");
}
private static void Radio_OnTransmitSuccess()
{
Debug.WriteLine($"{DateTime.UtcNow:HH:mm:ss}-TX Succeeded!");
}
private static void Radio_OnTransmitFailed()
{
Debug.WriteLine($"{DateTime.UtcNow:HH:mm:ss}-TX failed!");
}
}
}