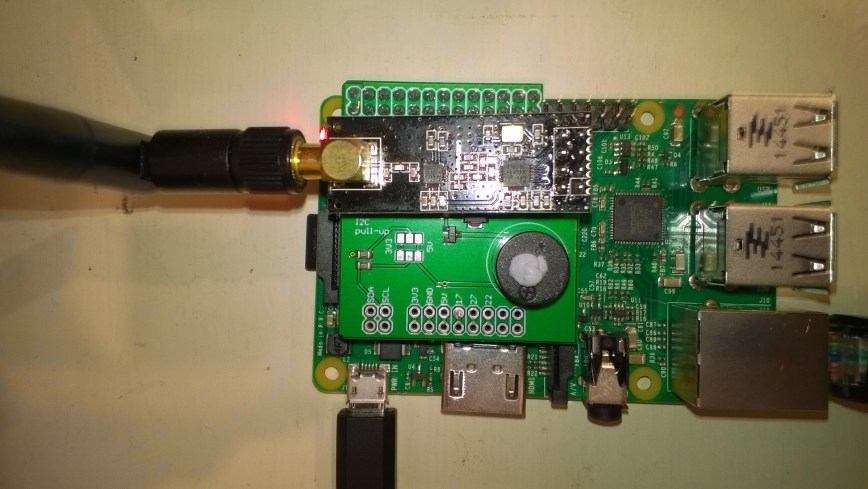
My first live deployment of the nRF24L01 Windows 10 IoT Core field gateway is now scheduled for mid Q1 2018 so time for a reboot. After digging out my Raspbery PI 2/3 devices and the nRF24L01+ shield (with modifications detailed here) I have a basic plan with some milestones.
My aim is to be able to wirelessly acquire data from several dozen Arduino, devduino, seeeduino, and Netduino devices, Then, using a field gateway on a Raspberry PI running Windows 10 IoT Core upload it to Microsoft IoT Central
- Windows 10 IoT Core background application to test nRF24 shield
- Windows console application to explore IoT Central connectivity
- Windows 10 IoT Core background task for NRF24 library testing
- Basic devDuino V2.2 client with AM2315 temperature&humidity sensor
- Seeeduino V4.2 client with Embedded Coolness shield and Seeedstudio temperature&humidity sensor
- Netduino V2/3 clients with Embedded Coolness shield and Seeedstudio temperature&humidity sensor.
- Windows 10 IoT Core background task to explore IoT Central connectivity
- Windows 10 IoT Core background task with the nRF24 library and IoT Central connectivity integrated
- devDuino V2.2 with power conservation and provisioning functionality
First bit of code – Bleepy a simple background application to test the piezo beeper on the RPI NRF24 Shield
namespace devmobile.IoTCore.Bleepy
{
public sealed class StartupTask : IBackgroundTask
{
private BackgroundTaskDeferral deferral;
private const int ledPinNumber = 4;
private GpioPin ledGpioPin;
private ThreadPoolTimer timer;
public void Run(IBackgroundTaskInstance taskInstance)
{
var gpioController = GpioController.GetDefault();
if (gpioController == null)
{
Debug.WriteLine("GpioController.GetDefault failed");
return;
}
ledGpioPin = gpioController.OpenPin(ledPinNumber);
if (ledGpioPin == null)
{
Debug.WriteLine("gpioController.OpenPin failed");
return;
}
ledGpioPin.SetDriveMode(GpioPinDriveMode.Output);
this.timer = ThreadPoolTimer.CreatePeriodicTimer(Timer_Tick, TimeSpan.FromMilliseconds(500));
deferral = taskInstance.GetDeferral();
Debug.WriteLine("Rum completed");
}
private void Timer_Tick(ThreadPoolTimer timer)
{
GpioPinValue currentPinValue = ledGpioPin.Read();
if (currentPinValue == GpioPinValue.High)
{
ledGpioPin.Write(GpioPinValue.Low);
}
else
{
ledGpioPin.Write(GpioPinValue.High);
}
}
}
}
Note the blob of blu tack over the piezo beeper to mute noise

Pingback: .Net Meadow nRF24L01 library Part1 | devMobile's blog
Pingback: TinyCLR OS V2 nRF24L01 library Part1 | devMobile's blog
Pingback: nanoFramework nRF24L01 library Part1 | devMobile's blog