A couple of parcels of parts arrived last week and I have started assembling my next robot project (possibly for code club). It’s a 4WD drive robot with an nRF24L01+ based remote control.
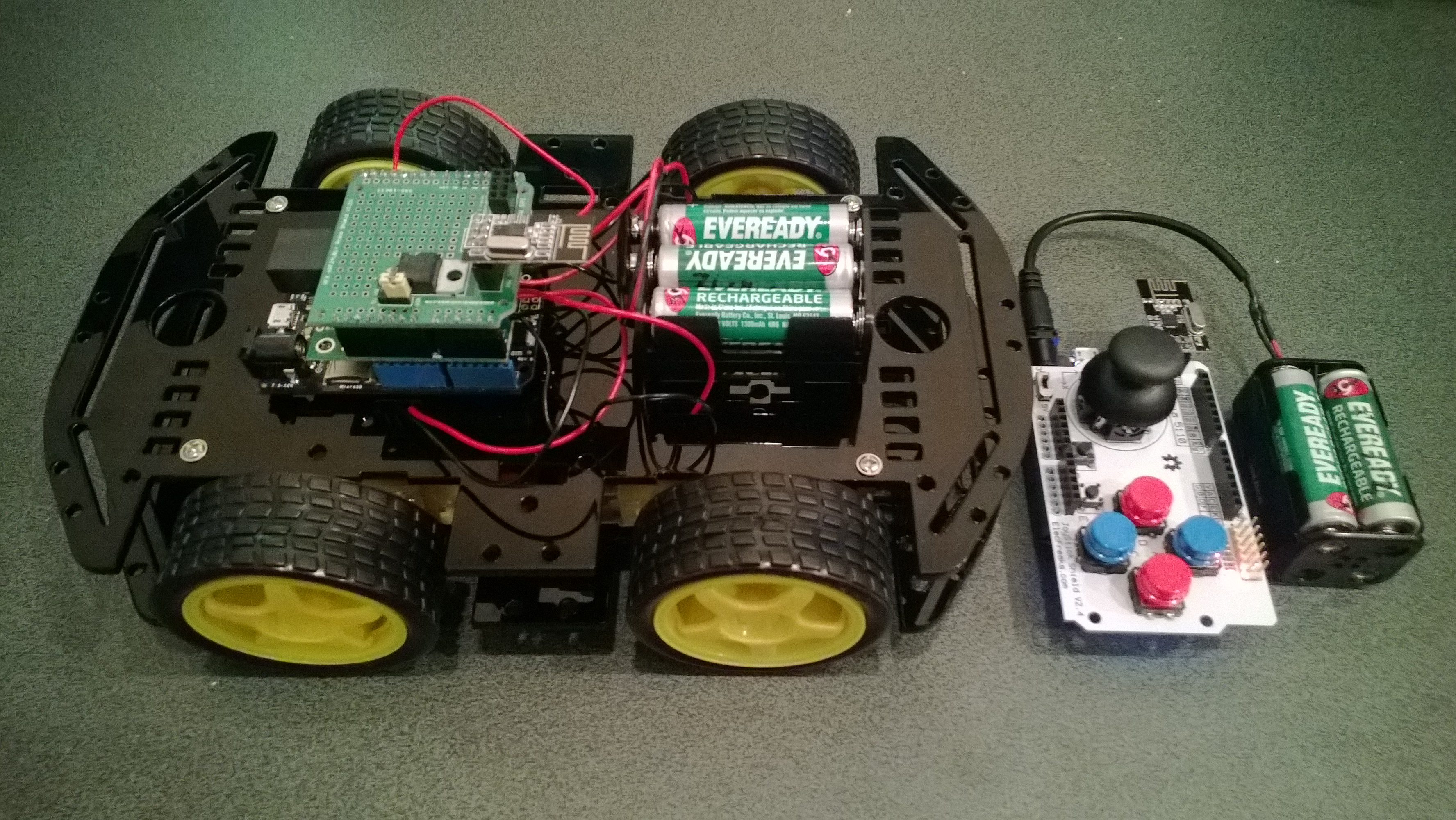
ElecFreaks 4WD Robot and Remote
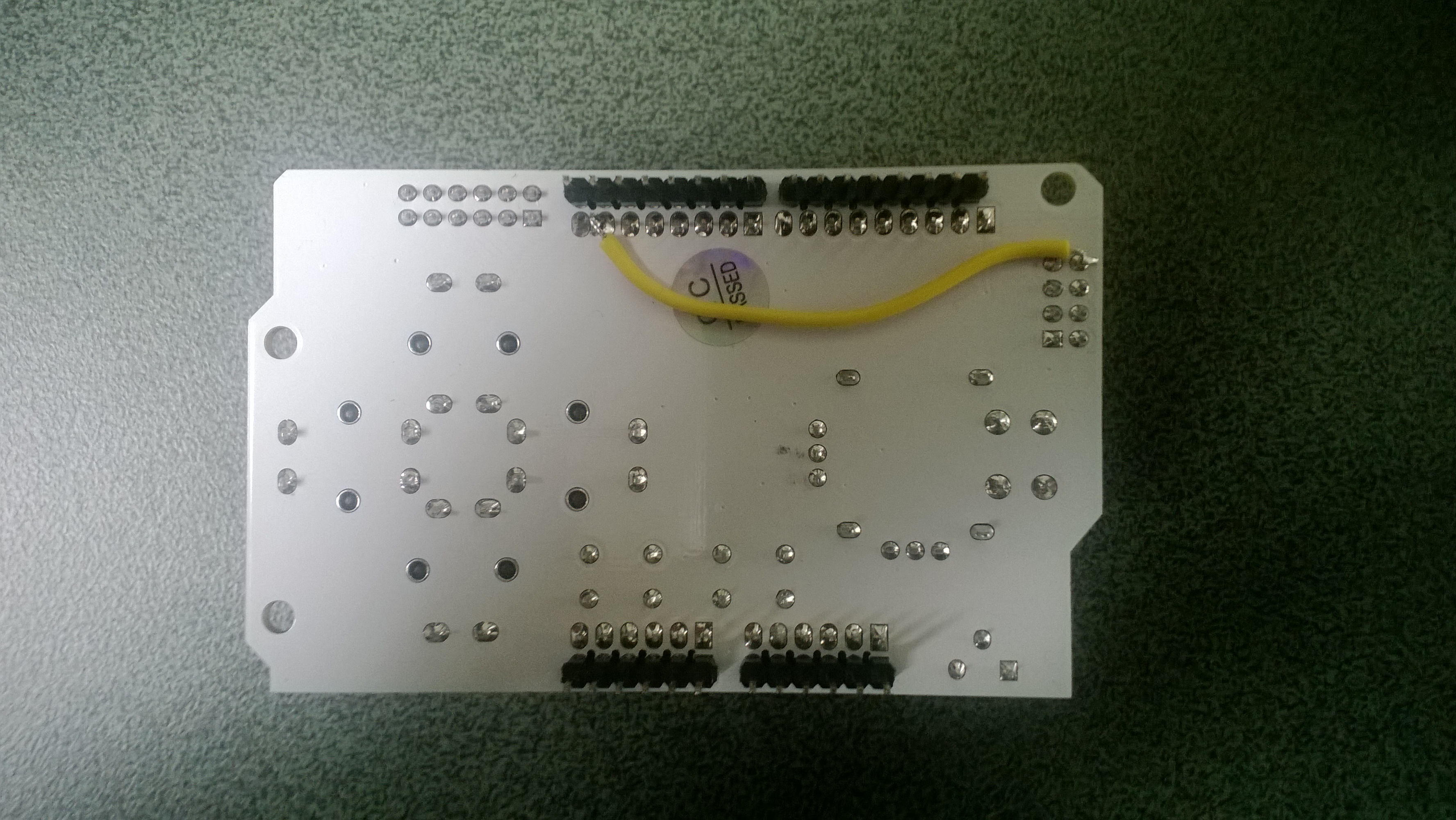
Had a slight problem with pin usage, the Embedded Coolness nRF24L01 shield and Pololu Dual MC33926 Motor Shield both use pin D2(irq) & D7(csn). The polulu shield supports some customising of pins so I disconnected D2(Status flag indicator), cut the D7 link (Motor 1 direction input) and wired it to pin D5.
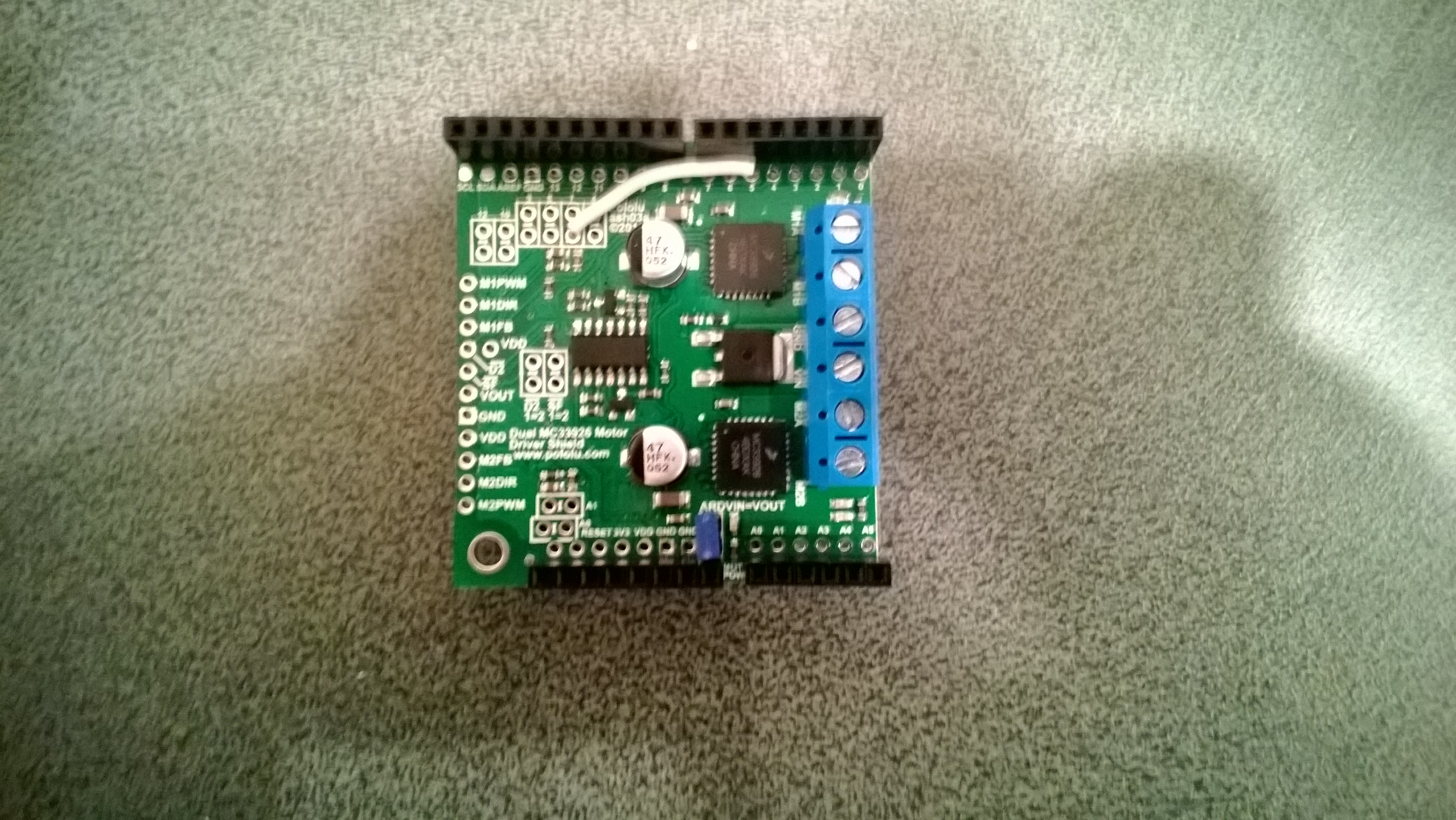
Pololu Dual MC33926 Modifications
I’m using the nRF24l01 driver from codeplex as basis for both ends of my remote control, code to follow…
Bill of materials (Prices USD as at Feb 2014)
- Pololu Dual MC33926 Motor Shield USD29.95
- Elecfreaks Smart Car Chassis 4WD USD32.40
- Elecfreaks Joystick V2.4 USD9.98
- Embedded coolness RFX nRF24L01 shield + 2 x low power radio modules AUD12.90
- GlobalPC 6 x AA battery holder NZD2.25
- GlobalPC Battery snap 9V NZD0.75