This project builds on my ML.Net YoloV5 + Camera on ARM64 Raspberry PI post and adds support for turning a Light Emitting Diode(LED) on if the label of any object detected in an image is in the PredictionLabelsOfInterest list.
{
"ApplicationSettings": {
"ImageTimerDue": "0.00:00:15",
"ImageTimerPeriod": "0.00:00:30",
"CameraUrl": "...",
"CameraUserName": "..",
"CameraUserPassword": "...",
"LedPinNumer": 5,
"InputImageFilenameLocal": "InputLatest.jpg",
"OutputImageFilenameLocal": "OutputLatest.jpg",
"ProcessWaitForExit": 10000,
"YoloV5ModelPath": "Assets/yolov5/yolov5s.onnx",
"PredicitionScoreThreshold": 0.5,
"PredictionLabelsOfInterest": [
"bicycle",
"person",
"bench"
]
}
}
The test-rig has consists of a Unv ADZK-10 Security Camera, Power over Ethernet(PoE) module, D-Link 8 port switch, Raspberry PI 8G 4b with a Seeedstudio Grove-Base Hat for Raspberry Pi, and Grove-Blue LED Button.

class Program
{
private static Model.ApplicationSettings _applicationSettings;
private static bool _cameraBusy = false;
private static YoloScorer<YoloCocoP5Model> _scorer = null;
#if GPIO_SUPPORT
private static GpioController _gpiocontroller;
#endif
static async Task Main(string[] args)
{
Console.WriteLine($"{DateTime.UtcNow:yy-MM-dd HH:mm:ss} YoloV5ObjectDetectionCamera starting");
try
{
// load the app settings into configuration
var configuration = new ConfigurationBuilder()
.AddJsonFile("appsettings.json", false, true)
.Build();
_applicationSettings = configuration.GetSection("ApplicationSettings").Get<Model.ApplicationSettings>();
#if GPIO_SUPPORT
Console.WriteLine($" {DateTime.UtcNow:yy-MM-dd HH:mm:ss:fff} GPIO setup start");
_gpiocontroller = new GpioController(PinNumberingScheme.Logical);
_gpiocontroller.OpenPin(_applicationSettings.ButtonPinNumer, PinMode.InputPullDown);
_gpiocontroller.OpenPin(_applicationSettings.LedPinNumer, PinMode.Output);
_gpiocontroller.Write(_applicationSettings.LedPinNumer, PinValue.Low);
Console.WriteLine($" {DateTime.UtcNow:yy-MM-dd HH:mm:ss:fff} GPIO setup done");
#endif
_scorer = new YoloScorer<YoloCocoP5Model>(_applicationSettings.YoloV5ModelPath);
Timer imageUpdatetimer = new Timer(ImageUpdateTimerCallback, null, _applicationSettings.ImageImageTimerDue, _applicationSettings.ImageTimerPeriod);
Console.WriteLine($"{DateTime.UtcNow:yy-MM-dd HH:mm:ss} press <ctrl^c> to exit");
Console.WriteLine();
try
{
await Task.Delay(Timeout.Infinite);
}
catch (TaskCanceledException)
{
Console.WriteLine($"{DateTime.UtcNow:yy-MM-dd HH:mm:ss} Application shutown requested");
}
}
catch (Exception ex)
{
Console.WriteLine($"{DateTime.UtcNow:yy-MM-dd HH:mm:ss} Application shutown failure {ex.Message}", ex);
}
}
private static void ImageUpdateTimerCallback(object state)
{
DateTime requestAtUtc = DateTime.UtcNow;
// Just incase - stop code being called while photo already in progress
if (_cameraBusy)
{
return;
}
_cameraBusy = true;
Console.WriteLine($"{DateTime.UtcNow:yy-MM-dd HH:mm:ss} Image processing start");
try
{
#if SECURITY_CAMERA
Console.WriteLine($" {DateTime.UtcNow:yy-MM-dd HH:mm:ss:fff} Security Camera Image download start");
NetworkCredential networkCredential = new NetworkCredential()
{
UserName = _applicationSettings.CameraUserName,
Password = _applicationSettings.CameraUserPassword,
};
using (WebClient client = new WebClient())
{
client.Credentials = networkCredential;
client.DownloadFile(_applicationSettings.CameraUrl, _applicationSettings.InputImageFilenameLocal);
}
Console.WriteLine($" {DateTime.UtcNow:yy-MM-dd HH:mm:ss:fff} Security Camera Image download done");
#endif
#if RASPBERRY_PI_CAMERA
Console.WriteLine($" {DateTime.UtcNow:yy-MM-dd HH:mm:ss:fff} Raspberry PI Image capture start");
using (Process process = new Process())
{
process.StartInfo.FileName = @"libcamera-jpeg";
process.StartInfo.Arguments = $"-o {_applicationSettings.InputImageFilenameLocal} --nopreview -t1 --rotation 180";
process.StartInfo.RedirectStandardError = true;
process.Start();
if (!process.WaitForExit(_applicationSettings.ProcessWaitForExit) || (process.ExitCode != 0))
{
Console.WriteLine($"{DateTime.UtcNow:yy-MM-dd HH:mm:ss:fff} Image update failure {process.ExitCode}");
}
}
Console.WriteLine($" {DateTime.UtcNow:yy-MM-dd HH:mm:ss:fff} Raspberry PI Image capture done");
#endif
List<YoloPrediction> predictions;
// Process the image on local file system
using (Image image = Image.FromFile(_applicationSettings.InputImageFilenameLocal))
{
Console.WriteLine($" {DateTime.UtcNow:yy-MM-dd HH:mm:ss:fff} YoloV5 inferencing start");
predictions = _scorer.Predict(image);
Console.WriteLine($" {DateTime.UtcNow:yy-MM-dd HH:mm:ss:fff} YoloV5 inferencing done");
#if OUTPUT_IMAGE_MARKUP
using (Graphics graphics = Graphics.FromImage(image))
{
Console.WriteLine($" {DateTime.UtcNow:yy-MM-dd HH:mm:ss:fff} Image markup start");
foreach (var prediction in predictions) // iterate predictions to draw results
{
double score = Math.Round(prediction.Score, 2);
graphics.DrawRectangles(new Pen(prediction.Label.Color, 1), new[] { prediction.Rectangle });
var (x, y) = (prediction.Rectangle.X - 3, prediction.Rectangle.Y - 23);
graphics.DrawString($"{prediction.Label.Name} ({score})", new Font("Consolas", 16, GraphicsUnit.Pixel), new SolidBrush(prediction.Label.Color), new PointF(x, y));
}
image.Save(_applicationSettings.OutputImageFilenameLocal);
Console.WriteLine($" {DateTime.UtcNow:yy-MM-dd HH:mm:ss:fff} Image markup done");
}
#endif
}
#if PREDICTION_CLASSES
Console.WriteLine($" {DateTime.UtcNow:yy-MM-dd HH:mm:ss:fff} Image classes start");
foreach (var prediction in predictions)
{
Console.WriteLine($" Name:{prediction.Label.Name} Score:{prediction.Score:f2} Valid:{prediction.Score > _applicationSettings.PredicitionScoreThreshold}");
}
Console.WriteLine($" {DateTime.UtcNow:yy-MM-dd HH:mm:ss:fff} Image classes done");
#endif
#if PREDICTION_CLASSES_OF_INTEREST
IEnumerable<string> predictionsOfInterest= predictions.Where(p=>p.Score > _applicationSettings.PredicitionScoreThreshold).Select(c => c.Label.Name).Intersect(_applicationSettings.PredictionLabelsOfInterest, StringComparer.OrdinalIgnoreCase);
if (predictionsOfInterest.Any())
{
Console.WriteLine($" {DateTime.UtcNow:yy-MM-dd HH:mm:ss} Camera image comtains {String.Join(",", predictionsOfInterest)}");
}
#if GPIO_SUPPORT
if (predictionsOfInterest.Any())
{
_gpiocontroller.Write(_applicationSettings.LedPinNumer, PinValue.High);
}
else
{
_gpiocontroller.Write(_applicationSettings.LedPinNumer, PinValue.Low);
}
#endif
#endif
}
catch (Exception ex)
{
Console.WriteLine($"{DateTime.UtcNow:yy-MM-dd HH:mm:ss} Camera image download, upload or post procesing failed {ex.Message}");
}
finally
{
_cameraBusy = false;
}
TimeSpan duration = DateTime.UtcNow - requestAtUtc;
Console.WriteLine($"{DateTime.UtcNow:yy-MM-dd HH:mm:ss} Image processing done {duration.TotalSeconds:f2} sec");
Console.WriteLine();
}
}
The name of the digital output pin, input image, output image and yoloV5 model file names are configured in the appsettings.json file.

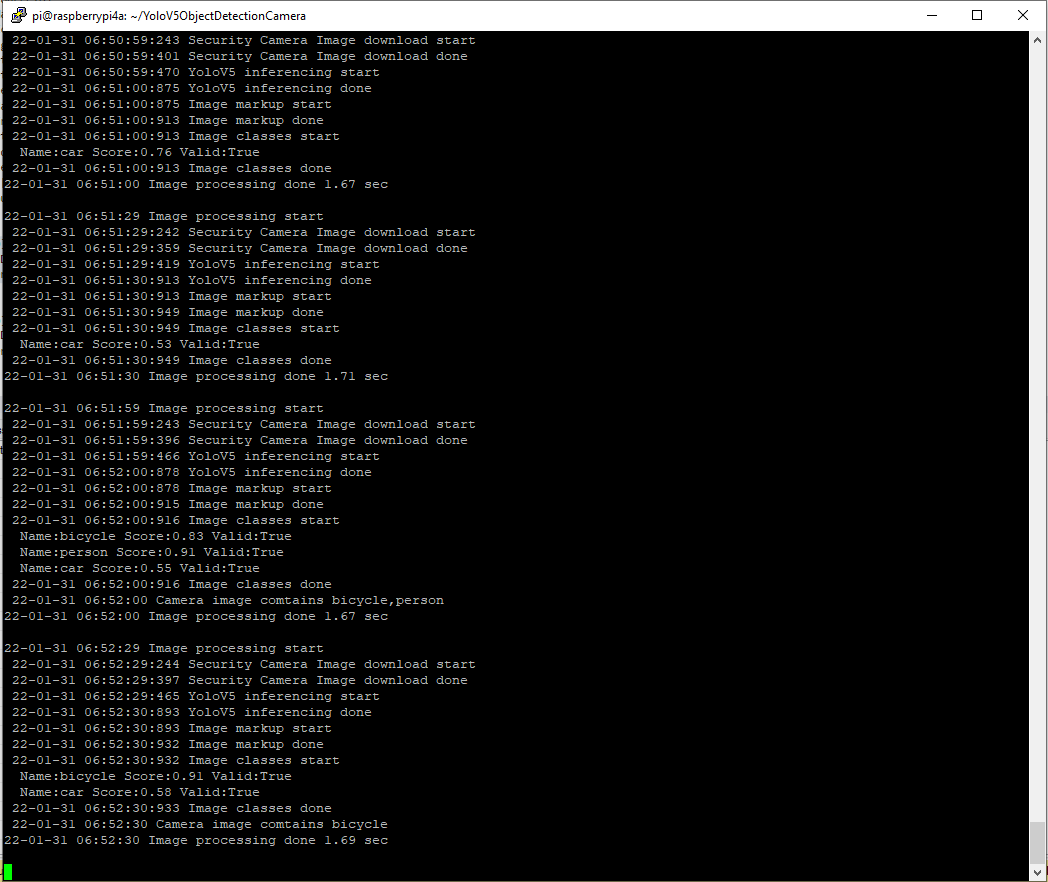
The 22-01-31 06:52 “person” detection is me moving the mountain bike into position.

Summary
Once the YoloV5s model was loaded, inferencing was taking roughly 1.45 seconds. The application is starting to get a bit “nasty” so for the next version I’ll need to do some refactoring.