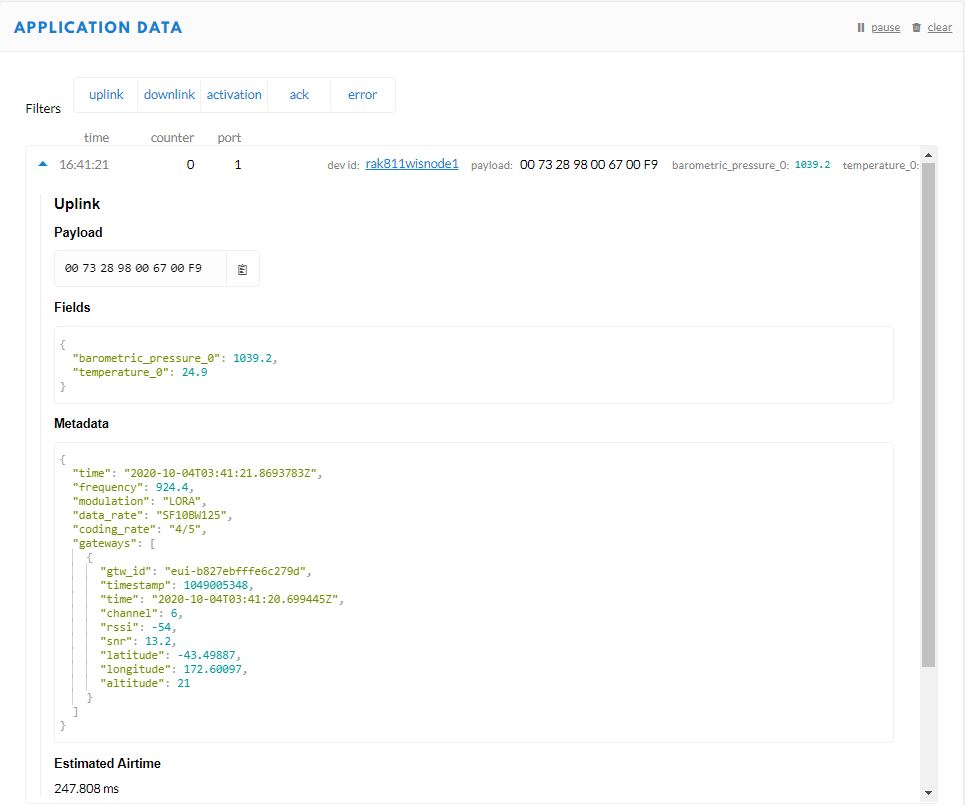
Reducing the size of message payloads is important for LoRa/LoRaWAN communications, as it reduces power consumption and bandwidth usage. One of the more common formats is Low Power Payload(LPP) which is based on the IPSO Alliance Smart Objects Guidelines and is natively supported by The Things Network(TTN).
private enum DataType : byte
{
DigitalInput = 0, // 1 byte
DigitialOutput = 1, // 1 byte
AnalogInput = 2, // 2 bytes, 0.01 signed
AnalogOutput = 3, // 2 bytes, 0.01 signed
Luminosity = 101, // 2 bytes, 1 lux unsigned
Presence = 102, // 1 byte, 1
Temperature = 103, // 2 bytes, 0.1°C signed
RelativeHumidity = 104, // 1 byte, 0.5% unsigned
Accelerometer = 113, // 2 bytes per axis, 0.001G
BarometricPressure = 115, // 2 bytes 0.1 hPa Unsigned
Gyrometer = 134, // 2 bytes per axis, 0.01 °/s
Gps = 136, // 3 byte lon/lat 0.0001 °, 3 bytes alt 0.01m
}
My implementation was “inspired” by some C/C++ sample code. The first step was to allocate a buffer to store the byte encoded values. I pre allocated the buffer to try and reduce the impacts of garbage collection. The code uses a manually incremented index into the buffer for performance reasons, plus the inconsistent support of System.Collections.Generic and Language Integrated Query(LINQ) on my three embedded platforms. The maximum length message that can be sent is limited by coding rate, duty cycle and bandwidth of the LoRa channel.
public Encoder(byte bufferSize)
{
if ((bufferSize < BufferSizeMinimum) || ( bufferSize > BufferSizeMaximum))
{
throw new ArgumentException($"BufferSize must be between {BufferSizeMinimum} and {BufferSizeMaximum}", "bufferSize");
}
buffer = new byte[bufferSize];
}
For a simple data types like a digital input a single byte (True or False ) is used. The channel parameter is included so that multiple values of the same data type can be included in a message.
public void DigitalInputAdd(byte channel, bool value)
{
if ((index + DigitalInputSize) > buffer.Length)
{
throw new ApplicationException("DigitalInputAdd insufficent buffer capacity");
}
buffer[index++] = channel;
buffer[index++] = (byte)DataType.DigitalInput;
// I know this is fugly but it works on all platforms
if (value)
{
buffer[index++] = 1;
}
else
{
buffer[index++] = 0;
}
}
For more complex data types like a Global Positioning System(GPS) location (Latitude, Longitude and Altitude) the values are converted to 32bit signed integers and only 3 of the 4 bytes are used.
public void GpsAdd(byte channel, float latitude, float longitude, float meters)
{
if ((index + GpsSize) > buffer.Length)
{
throw new ApplicationException("GpsAdd insufficent buffer capacity");
}
int lat = (int)(latitude * 10000);
int lon = (int)(longitude * 10000);
int alt = (int)(meters * 100);
buffer[index++] = channel;
buffer[index++] = (byte)DataType.Gps;
buffer[index++] = (byte)(lat >> 16);
buffer[index++] = (byte)(lat >> 8);
buffer[index++] = (byte)lat;
buffer[index++] = (byte)(lon >> 16);
buffer[index++] = (byte)(lon >> 8);
buffer[index++] = (byte)lon;
buffer[index++] = (byte)(alt >> 16);
buffer[index++] = (byte)(alt >> 8);
buffer[index++] = (byte)alt;
}
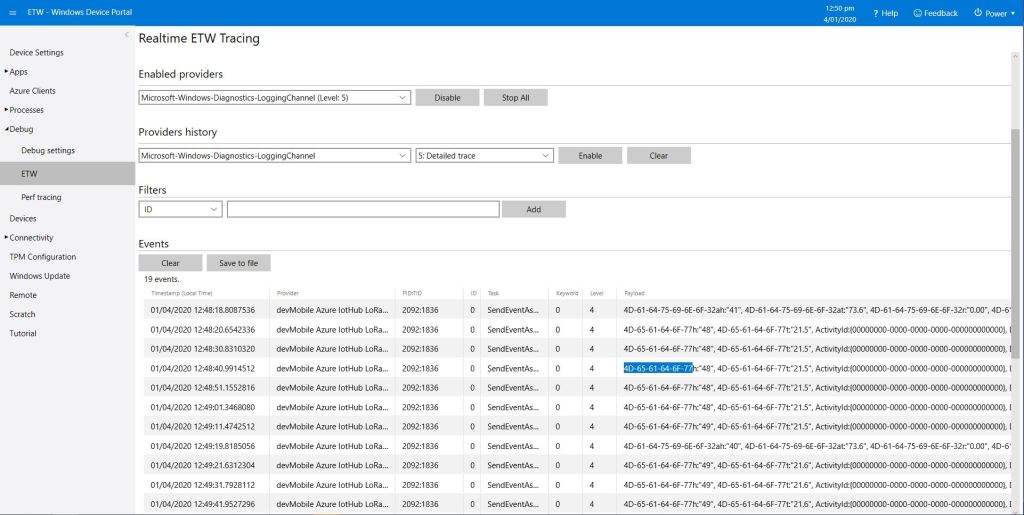
Before the message can be sent it needs to be converted to its Binary Coded Decimal(BCD) representation and all formatting characters removed.
public string Bcd()
{
StringBuilder payloadBcd = new StringBuilder(BitConverter.ToString(buffer, 0, index));
payloadBcd = payloadBcd.Replace("-", "");
return payloadBcd.ToString();
}
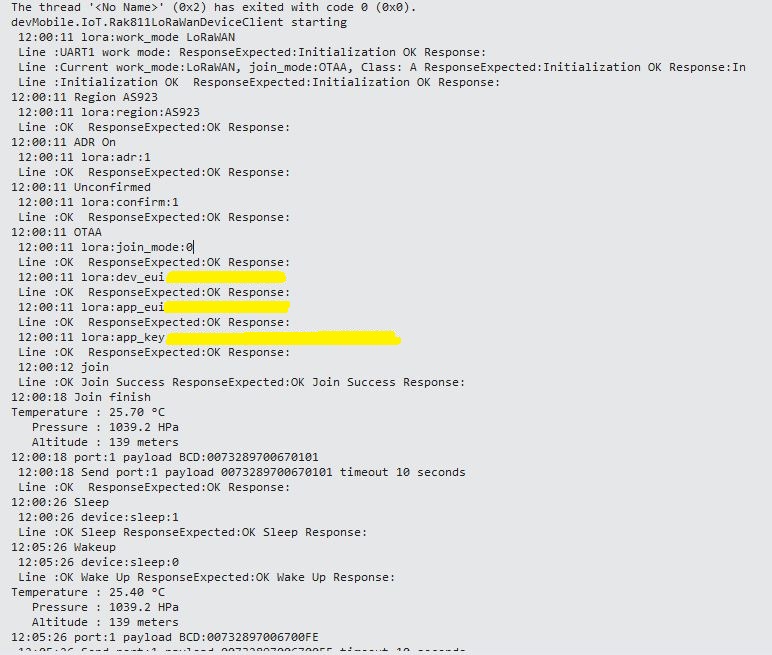
The implementation had to be revised a couple of times so It would work with desktop and GHI Electronics TinyCLRV2 powered devices. There maybe some modifications required as I port it to nanoFramework and Wilderness Labs Meadow devices.