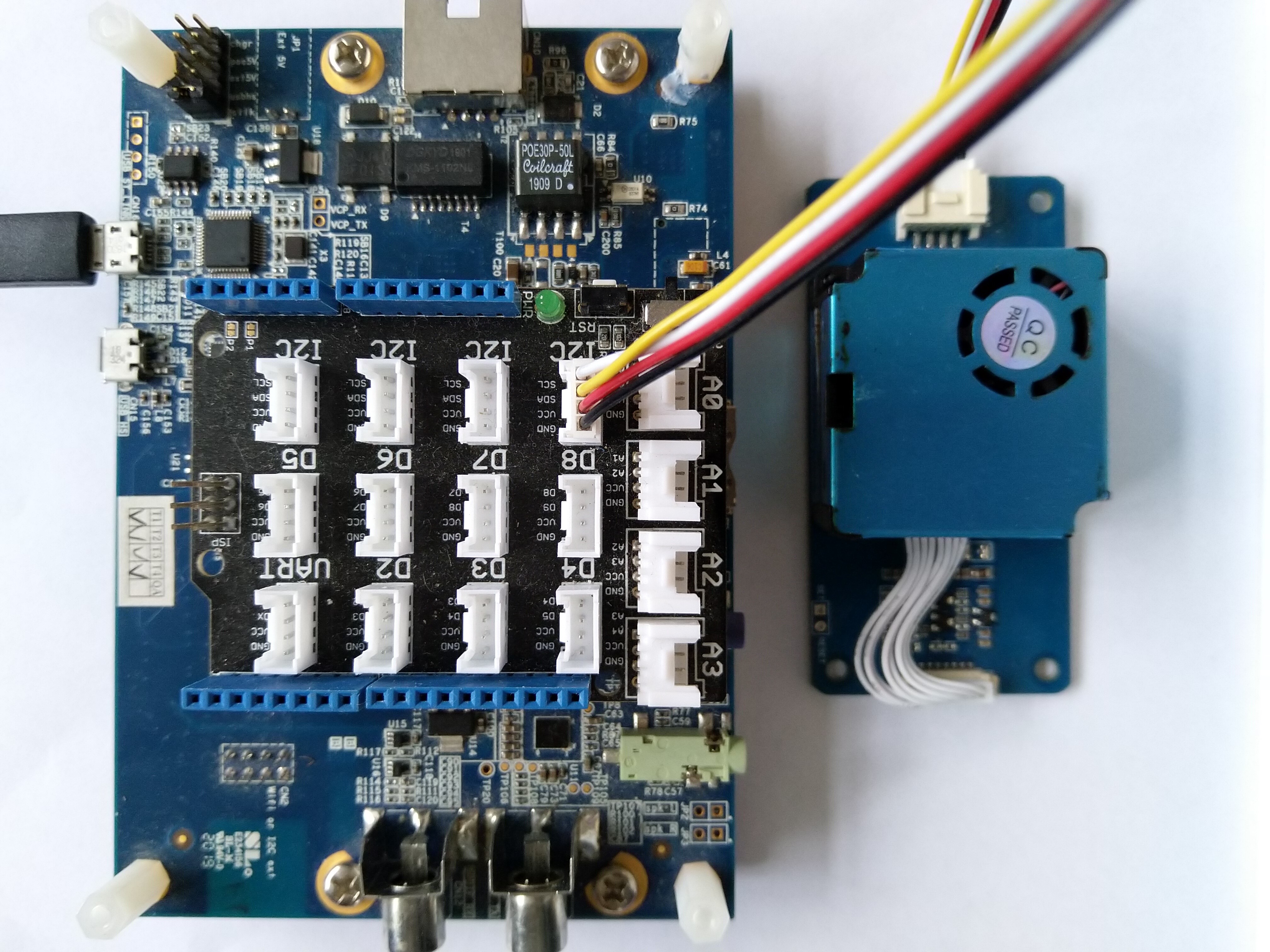
The source code of my .NET nanoFramework Seeedstudio Grove – Laser PM2.5 Dust Sensor HM3301 library is now available on GitHub. I have tested the library and sample application with Sparkfun Thing Plus and ST Micro STM32F7691 Discovery devices. (I can validate on more platform configurations if there is interest).
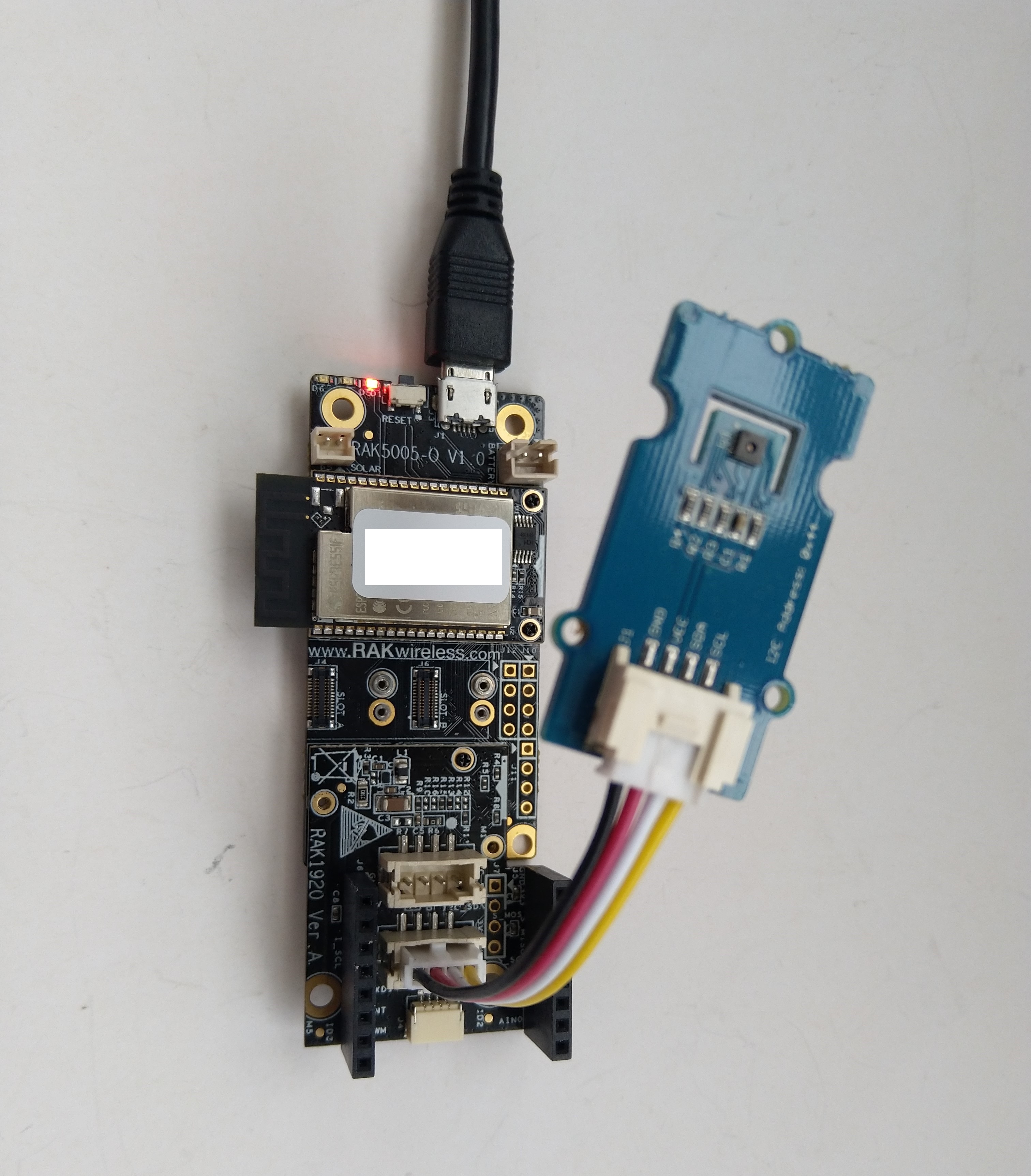
Important: make sure you setup the I2C pins especially on ESP32 Devices before creating the I2cDevice,
The .NET nanoFramework device libraries use a TryGet… pattern to retrieve sensor values, this library throws an exception if reading a sensor value fails. I’m not certain which approach is “better” as reading the Seeedstudio Grove – Laser PM2.5 Dust Sensor has never failed. The only time reading the “values” buffer failed was when I unplugged the device which I think is “exceptional”.
//---------------------------------------------------------------------------------
// Copyright (c) April 2023, devMobile Software
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
//
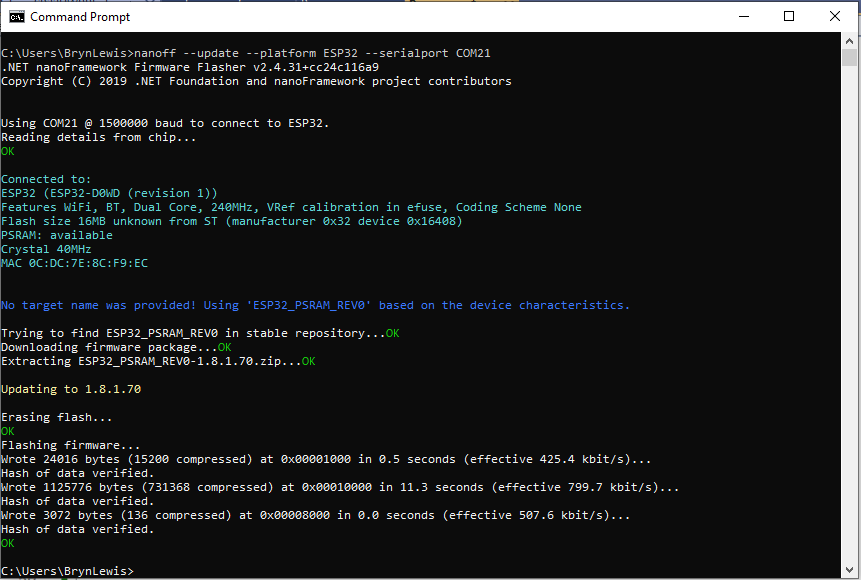
// nanoff --target ST_STM32F769I_DISCOVERY --update
// nanoff --platform ESP32 --serialport COM7 --update
//
//---------------------------------------------------------------------------------
#define ST_STM32F769I_DISCOVERY
//#define SPARKFUN_ESP32_THING_PLUS
namespace devMobile.IoT.Device.SeeedstudioHM3301
{
using System;
using System.Device.I2c;
using System.Threading;
#if SPARKFUN_ESP32_THING_PLUS
using nanoFramework.Hardware.Esp32;
#endif
class Program
{
static void Main(string[] args)
{
const int busId = 1;
Thread.Sleep(5000);
#if SPARKFUN_ESP32_THING_PLUS
Configuration.SetPinFunction(Gpio.IO23, DeviceFunction.I2C1_DATA);
Configuration.SetPinFunction(Gpio.IO22, DeviceFunction.I2C1_CLOCK);
#endif
I2cConnectionSettings i2cConnectionSettings = new(busId, SeeedstudioHM3301.DefaultI2cAddress);
using I2cDevice i2cDevice = I2cDevice.Create(i2cConnectionSettings);
{
using (SeeedstudioHM3301 seeedstudioHM3301 = new SeeedstudioHM3301(i2cDevice))
{
while (true)
{
SeeedstudioHM3301.ParticulateMeasurements particulateMeasurements = seeedstudioHM3301.Read();
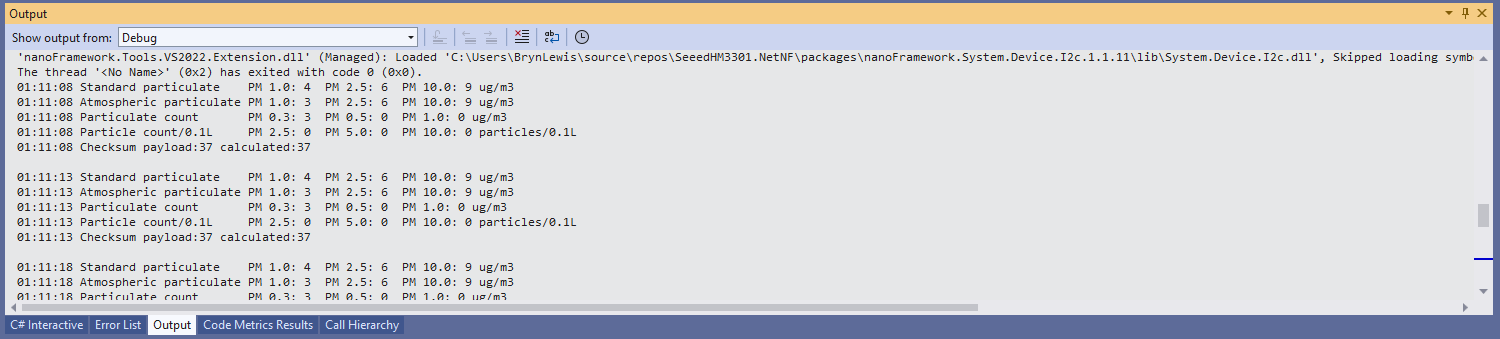
Console.WriteLine($"Standard PM1.0: {particulateMeasurements.Standard.PM1_0} ug/m3 PM2.5: {particulateMeasurements.Standard.PM2_5} ug/m3 PM10.0: {particulateMeasurements.Standard.PM10_0} ug/m3 ");
Console.WriteLine($"Atmospheric PM1.0: {particulateMeasurements.Atmospheric.PM1_0} ug/m3 PM2.5: {particulateMeasurements.Atmospheric.PM2_5} ug/m3 PM10.0: {particulateMeasurements.Standard.PM10_0} ug/m3");
// Always 0, checked payload so not a conversion issue. will check in Seeedstudio forums
// Console.WriteLine($"Count 0.3um: {particulateMeasurements.Count.Diameter0_3}/l 0.5um: {particulateMeasurements.Count.Diameter0_5} /l 1.0um : {particulateMeasurements.Count.Diameter1_0}/l 2.5um : {particulateMeasurements.Count.Diameter2_5}/l 5.0um : {particulateMeasurements.Count.Diameter5_0}/l 10.0um : {particulateMeasurements.Count.Diameter10_0}/l");
Thread.Sleep(new TimeSpan(0,1,0));
}
}
}
}
}
}
I’m going to soak test the library for a week to check that is working okay, then most probably refactor the code so it can be added to the nanoFramework IoT.Device Library repository.