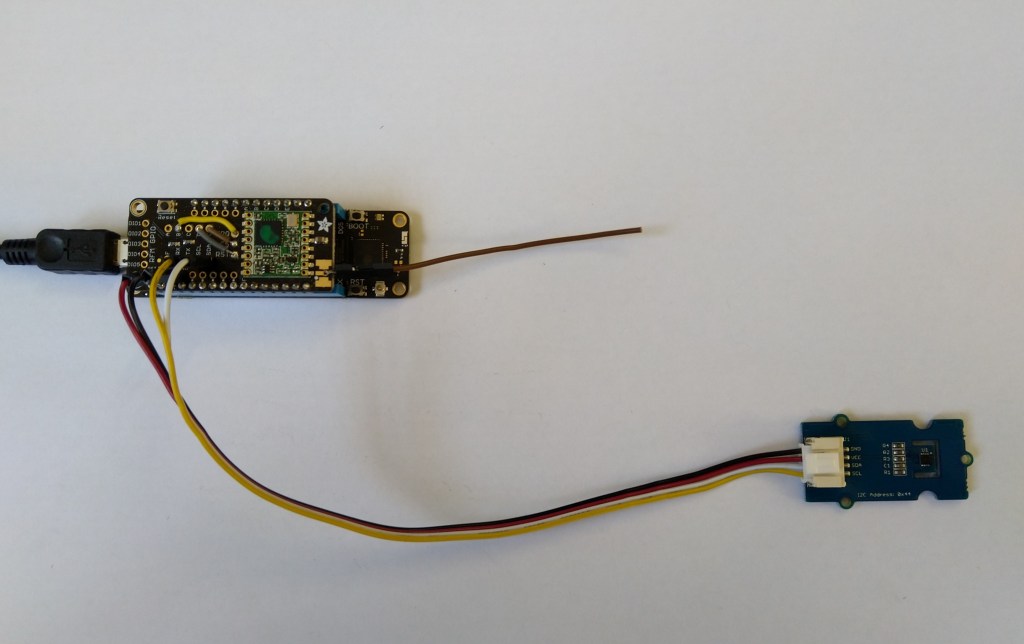
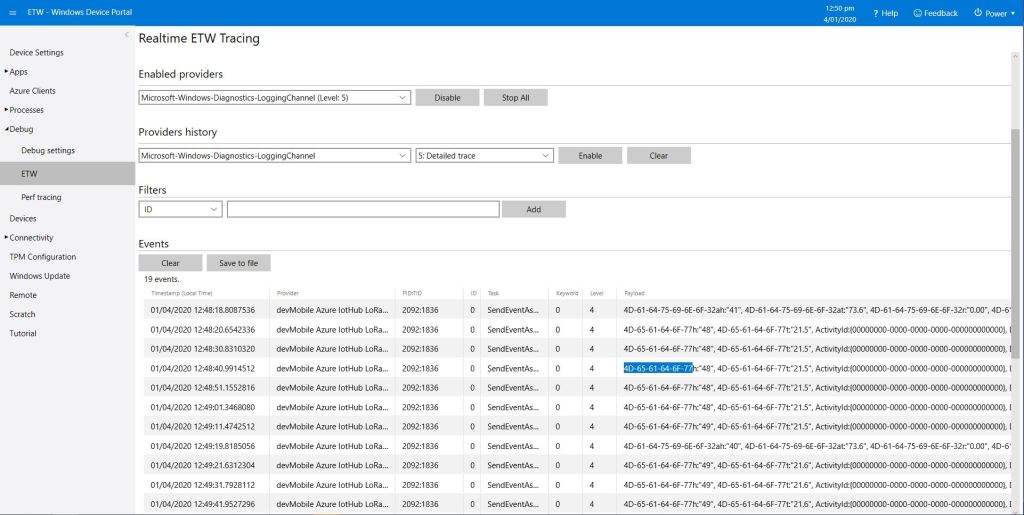
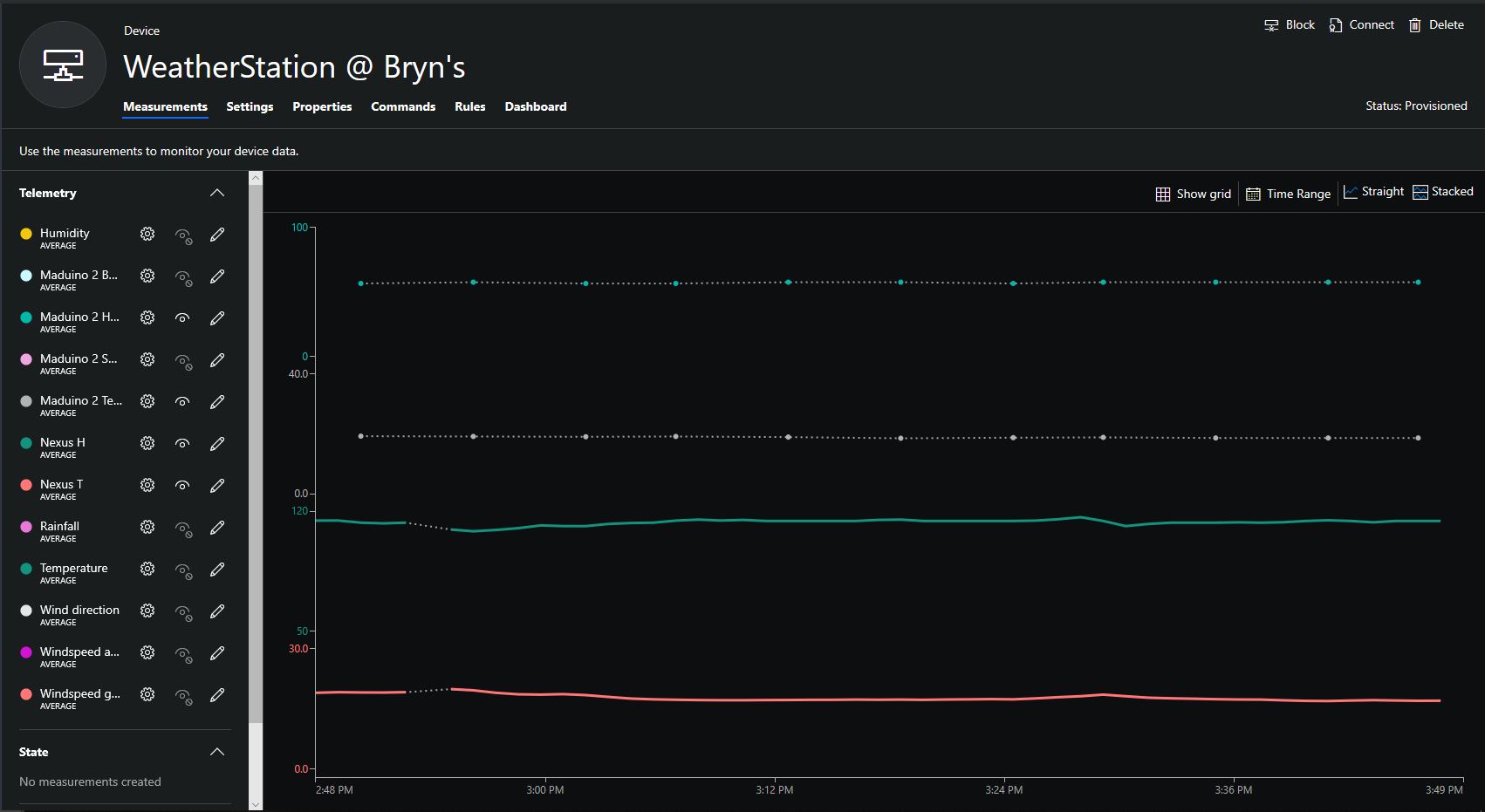
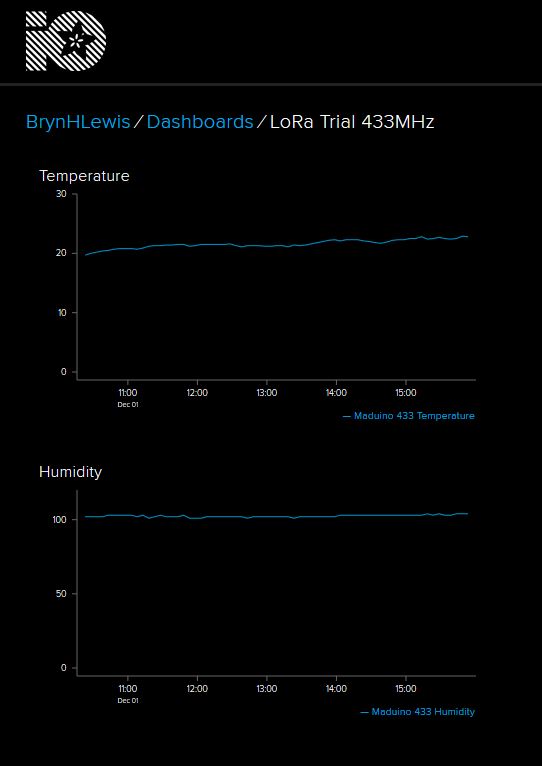
This is a demo Wilderness Labs Meadow client that uploads temperature and humidity data to my Azure IoT Hubs/Central, AdaFruit.IO or MQTT on Raspberry PI field gateways.
Bill of materials (Prices Jan 2020).
- Wilderness Labs Meadow USD50 (presale pricing)
- Grove – Temperature&Humidity Sensor (SHT31) USD11.90
- Grove – 4 pin Male Jumper to Grove 4 pin Conversion Cable USD2.90
- Adafruit LoRa Radio FeatherWing – RFM95W
//---------------------------------------------------------------------------------
// Copyright (c) January 2020, devMobile Software
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
//
//---------------------------------------------------------------------------------
namespace devMobile.IoT.FieldGateway.Client
{
using System;
using System.Text;
using System.Threading;
using devMobile.IoT.Rfm9x;
using Meadow;
using Meadow.Devices;
using Meadow.Foundation.Leds;
using Meadow.Foundation.Sensors.Atmospheric;
using Meadow.Hardware;
using Meadow.Peripherals.Leds;
public class MeadowClient : App<F7Micro, MeadowClient>
{
private const double Frequency = 915000000.0;
private readonly byte[] fieldGatewayAddress = Encoding.UTF8.GetBytes("LoRaIoT1");
private readonly byte[] deviceAddress = Encoding.UTF8.GetBytes("Meadow");
private readonly Rfm9XDevice rfm9XDevice;
private readonly TimeSpan periodTime = new TimeSpan(0, 0, 60);
private readonly Sht31D sensor;
private readonly ILed Led;
public MeadowClient()
{
Led = new Led(Device, Device.Pins.OnboardLedGreen);
try
{
sensor = new Sht31D(Device.CreateI2cBus());
ISpiBus spiBus = Device.CreateSpiBus(500);
rfm9XDevice = new Rfm9XDevice(Device, spiBus, Device.Pins.D09, Device.Pins.D10, Device.Pins.D12);
rfm9XDevice.Initialise(Frequency, paBoost: true, rxPayloadCrcOn: true);
#if DEBUG
rfm9XDevice.RegisterDump();
#endif
rfm9XDevice.OnReceive += Rfm9XDevice_OnReceive;
rfm9XDevice.Receive(deviceAddress);
rfm9XDevice.OnTransmit += Rfm9XDevice_OnTransmit;
}
catch (Exception ex)
{
Console.WriteLine(ex.Message);
}
while (true)
{
sensor.Update();
Console.WriteLine($"{DateTime.UtcNow:HH:mm:ss}-TX T:{sensor.Temperature:0.0}C H:{sensor.Humidity:0}%");
string payload = $"t {sensor.Temperature:0.0},h {sensor.Humidity:0}";
Led.IsOn = true;
rfm9XDevice.Send(fieldGatewayAddress, Encoding.UTF8.GetBytes(payload));
Thread.Sleep(periodTime);
}
}
private void Rfm9XDevice_OnReceive(object sender, Rfm9XDevice.OnDataReceivedEventArgs e)
{
try
{
string addressText = UTF8Encoding.UTF8.GetString(e.Address);
string addressHex = BitConverter.ToString(e.Address);
string messageText = UTF8Encoding.UTF8.GetString(e.Data);
Console.WriteLine($"{DateTime.UtcNow:HH:mm:ss}-RX PacketSnr {e.PacketSnr:0.0} Packet RSSI {e.PacketRssi}dBm RSSI {e.Rssi}dBm = {e.Data.Length} byte message {messageText}");
}
catch (Exception ex)
{
Console.WriteLine(ex.Message);
}
}
private void Rfm9XDevice_OnTransmit(object sender, Rfm9XDevice.OnDataTransmitedEventArgs e)
{
Led.IsOn = false;
Console.WriteLine("{0:HH:mm:ss}-TX Done", DateTime.Now);
}
}
}
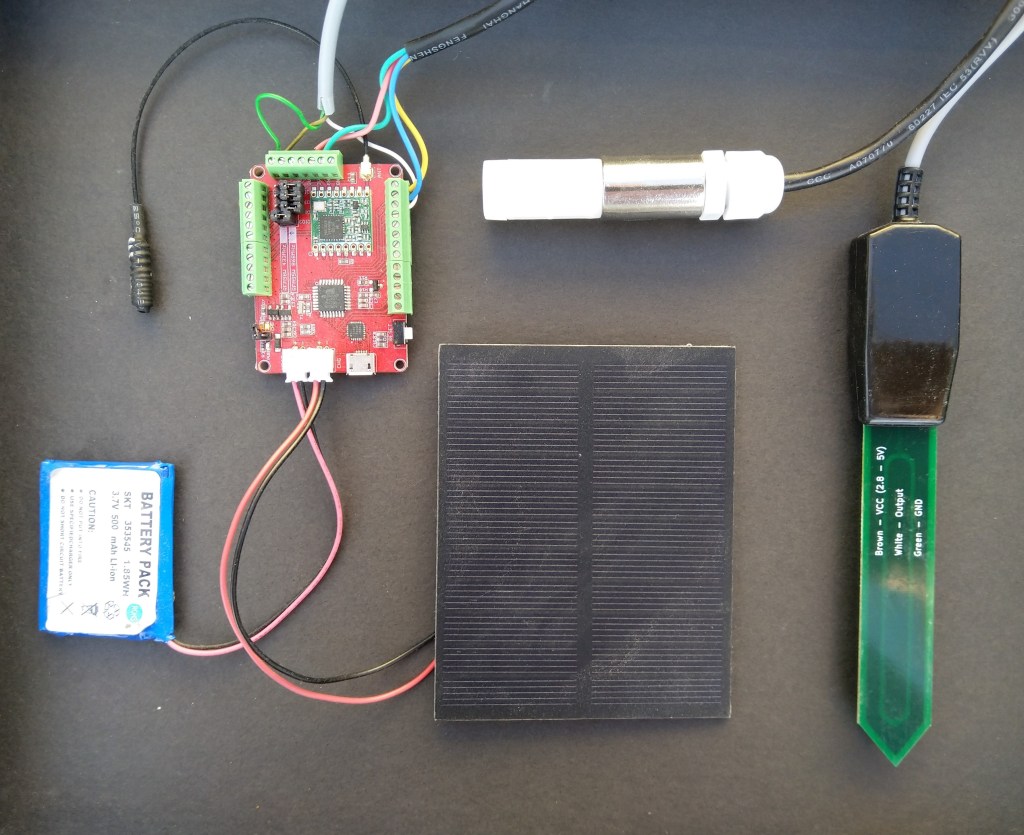
The Meadow platform is a work in progress (Jan 2020) so I haven’t put any effort into minimising power consumption but will revisit this in a future post.