Transmit Basic
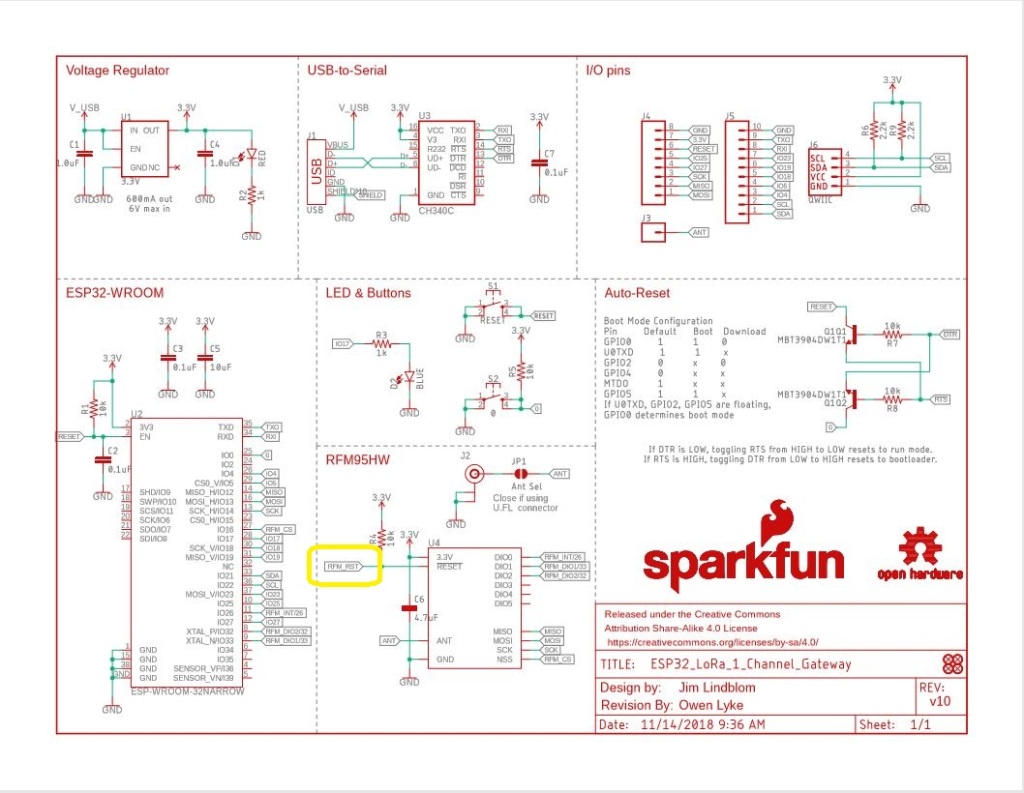
I had a couple of Armtronix IA005 SX1276 loRa nodes sitting on my desk from a recent post so I used one of them running a modified version of the Arduino LoRa library LoRaSetSyncWord example to receive messages from my Meadow device.
/*
LoRa Duplex communication with Sync Word
Sends a message every half second, and polls continually
for new incoming messages. Sets the LoRa radio's Sync Word.
Spreading factor is basically the radio's network ID. Radios with different
Sync Words will not receive each other's transmissions. This is one way you
can filter out radios you want to ignore, without making an addressing scheme.
See the Semtech datasheet, http://www.semtech.com/images/datasheet/sx1276.pdf
for more on Sync Word.
created 28 April 2017
by Tom Igoe
*/
#include <stdlib.h>
#include <LoRa.h>
const int csPin = PA4; // LoRa radio chip select
const int resetPin = PC13; // LoRa radio reset
const int irqPin = PA11; // change for your board; must be a hardware interrupt pin
byte msgCount = 0; // count of outgoing messages
int interval = 2000; // interval between sends
long lastSendTime = 0; // time of last packet send
void setup() {
Serial.begin(9600); // initialize serial
while (!Serial);
Serial.println("LoRa Duplex - Set sync word");
// override the default CS, reset, and IRQ pins (optional)
LoRa.setPins(csPin, resetPin, irqPin);// set CS, reset, IRQ pin
if (!LoRa.begin(915E6)) { // initialize ratio at 915 MHz
Serial.println("LoRa init failed. Check your connections.");
while (true); // if failed, do nothing
}
LoRa.setSyncWord(0x12); // ranges from 0-0xFF, default 0x34, see API docs
LoRa.dumpRegisters(Serial);
Serial.println("LoRa init succeeded.");
}
void loop() {
if (millis() - lastSendTime > interval) {
String message = "HeLoRa World! "; // send a message
message += msgCount;
sendMessage(message);
Serial.println("Sending " + message);
lastSendTime = millis(); // timestamp the message
interval = random(1000) + 10000; // 10-11 seconds
msgCount++;
}
// parse for a packet, and call onReceive with the result:
onReceive(LoRa.parsePacket());
}
void sendMessage(String outgoing) {
LoRa.beginPacket(); // start packet
LoRa.print(outgoing); // add payload
LoRa.endPacket(); // finish packet and send it
msgCount++; // increment message ID
}
void onReceive(int packetSize) {
if (packetSize == 0) return; // if there's no packet, return
// read packet header bytes:
String incoming = "";
while (LoRa.available()) {
incoming += (char)LoRa.read();
}
Serial.println("Message: " + incoming);
Serial.println("RSSI: " + String(LoRa.packetRssi()));
Serial.println("Snr: " + String(LoRa.packetSnr()));
Serial.println();
}
The Meadow application
public class MeadowApp : App<F7Micro, MeadowApp>
{
private Rfm9XDevice rfm9XDevice;
public MeadowApp()
{
ISpiBus spiBus = Device.CreateSpiBus(500);
if (spiBus == null)
{
Console.WriteLine("spiBus == null");
}
rfm9XDevice = new Rfm9XDevice(Device, spiBus, Device.Pins.D09, Device.Pins.D11);
// Put device into LoRa + Sleep mode
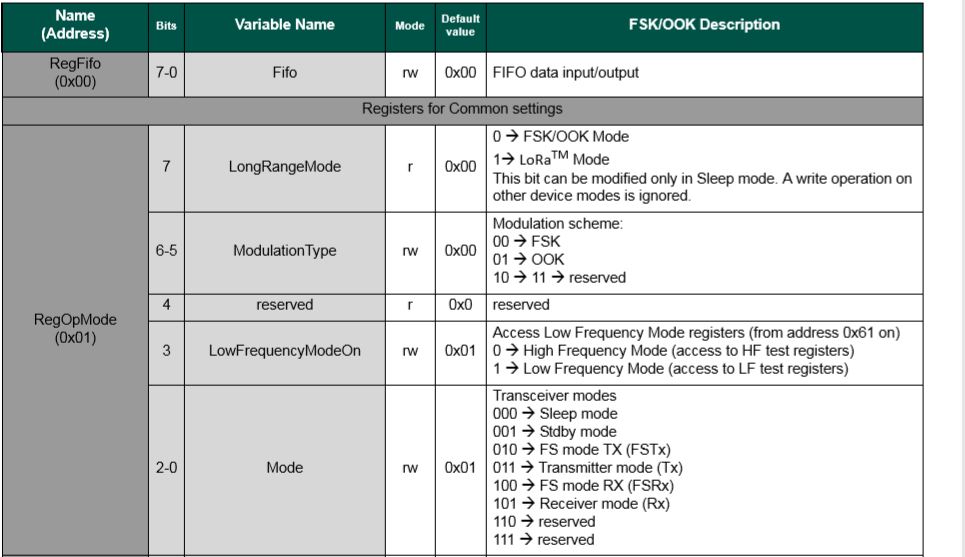
rfm9XDevice.RegisterWriteByte(0x01, 0b10000000); // RegOpMode
// Set the frequency to 915MHz
byte[] frequencyWriteBytes = { 0xE4, 0xC0, 0x00 }; // RegFrMsb, RegFrMid, RegFrLsb
rfm9XDevice.RegisterWrite(0x06, frequencyWriteBytes);
// More power PA Boost
rfm9XDevice.RegisterWriteByte(0x09, 0b10000000); // RegPaConfig
while (true)
{
rfm9XDevice.RegisterWriteByte(0x0E, 0x0); // RegFifoTxBaseAddress
// Set the Register Fifo address pointer
rfm9XDevice.RegisterWriteByte(0x0D, 0x0); // RegFifoAddrPtr
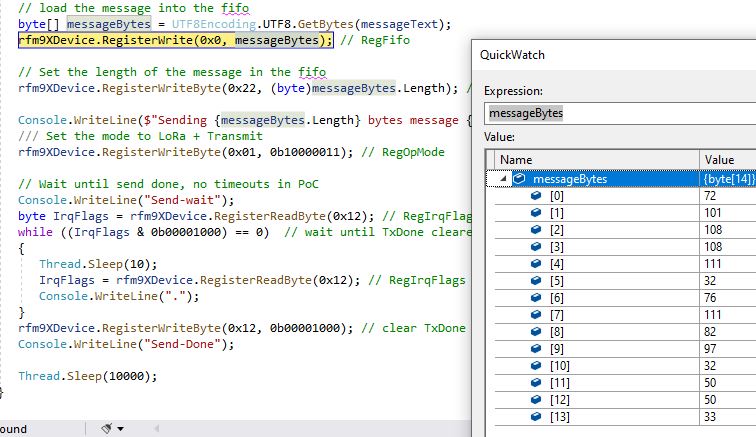
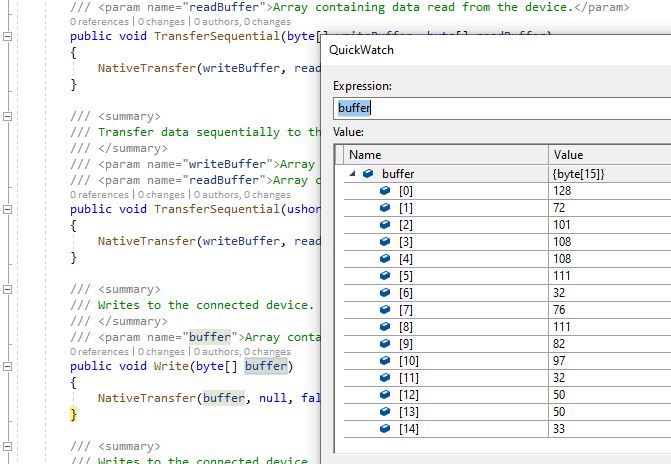
string messageText = "Hello LoRa!";
// load the message into the fifo
byte[] messageBytes = UTF8Encoding.UTF8.GetBytes(messageText);
foreach (byte b in messageBytes)
{
rfm9XDevice.RegisterWriteByte(0x0, b); // RegFifo
}
// Set the length of the message in the fifo
rfm9XDevice.RegisterWriteByte(0x22, (byte)messageBytes.Length); // RegPayloadLength
Console.WriteLine("Sending {0} bytes message {1}", messageBytes.Length, messageText);
/// Set the mode to LoRa + Transmit
rfm9XDevice.RegisterWriteByte(0x01, 0b10000011); // RegOpMode
// Wait until send done, no timeouts in PoC
Console.WriteLine("Send-wait");
byte IrqFlags = rfm9XDevice.RegisterReadByte(0x12); // RegIrqFlags
while ((IrqFlags & 0b00001000) == 0) // wait until TxDone cleared
{
Task.Delay(10).Wait();
IrqFlags = rfm9XDevice.RegisterReadByte(0x12); // RegIrqFlags
Console.Write(".");
}
Console.WriteLine("");
rfm9XDevice.RegisterWriteByte(0x12, 0b00001000); // clear TxDone bit
Console.WriteLine("Send-Done");
Task.Delay(30000).Wait();
}
}
When I ran the meadow application after some messing around with the jumper wires.
'App.exe' (CLR v4.0.30319: DefaultDomain): Loaded 'C:\WINDOWS\Microsoft.Net\assembly\GAC_64\mscorlib\v4.0_4.0.0.0__b77a5c561934e089\mscorlib.dll'.
'App.exe' (CLR v4.0.30319: DefaultDomain): Loaded 'C:\Users\BrynLewis\source\repos\RFM9X.Meadow\TransmitBasic\bin\Debug\net472\App.exe'. Symbols loaded.
'App.exe' (CLR v4.0.30319: App.exe): Loaded 'C:\Users\BrynLewis\source\repos\RFM9X.Meadow\TransmitBasic\bin\Debug\net472\Meadow.dll'.
The program '[37572] App.exe: Program Trace' has exited with code 0 (0x0).
The program '[37572] App.exe' has exited with code 0 (0x0).
.
.
DirectRegisterAccess = True
.
.
Sending 11 bytes message Hello LoRa!
Send-wait
Send-Done
Sending 11 bytes message Hello LoRa!
Send-wait
.
Send-Done
I could the see the messages arriving at the Armtronix device in the Arduino monitor (the other messages in the monitor are my solar powered weather station and soil moisture monitoring node).
12:47:55.198 -> Sending HeLoRa World! 10
12:48:05.745 -> Sending HeLoRa World! 12
12:48:06.663 -> Message: ⸮LoRaIoT1Maduino2at 85.8,ah 19,wsa 5,wsg 8,wd 123.38,r 0.00,
12:48:06.730 -> RSSI: -71
12:48:06.730 -> Snr: 10.00
12:48:06.730 ->
12:48:08.770 -> Message: Hello LoRa!
12:48:08.770 -> RSSI: -47
12:48:08.804 -> Snr: 9.00
12:48:08.804 ->
12:48:16.555 -> Sending HeLoRa World! 14
12:48:26.847 -> Sending HeLoRa World! 16
12:48:37.154 -> Sending HeLoRa World! 18
12:48:39.469 -> Message: Hello LoRa!
12:48:39.469 -> RSSI: -46
12:48:39.536 -> Snr: 9.00
12:48:39.536 ->
12:48:47.311 -> Sending HeLoRa World! 20
12:48:58.094 -> Sending HeLoRa World! 22
12:49:07.748 -> Message: ⸮LoRaIoT1Maduino2at 86.0,ah 19,wsa 5,wsg 15,wd 155.63,r 0.00,
12:49:07.817 -> RSSI: -71
12:49:07.817 -> Snr: 9.50
12:49:07.817 ->
12:49:08.464 -> Sending HeLoRa World! 24
12:49:10.097 -> Message: Hello LoRa!
12:49:10.097 -> RSSI: -46
12:49:10.130 -> Snr: 9.75
12:49:10.130 ->
12:49:19.373 -> Sending HeLoRa World! 26
12:49:30.125 -> Sending HeLoRa World! 28
12:49:40.262 -> Sending HeLoRa World! 30
12:49:40.671 -> Message: Hello LoRa!
12:49:40.671 -> RSSI: -46
12:49:40.705 -> Snr: 9.25
12:49:40.705 ->
12:49:50.725 -> Sending HeLoRa World! 32
12:50:01.081 -> Sending HeLoRa World! 34
12:50:08.800 -> Message: ⸮LoRaIoT1Maduino2at 85.6,ah 19,wsa 5,wsg 11,wd 159.00,r 0.00,
12:50:08.868 -> RSSI: -72
12:50:08.868 -> Snr: 10.00
12:50:08.868 ->
12:50:11.219 -> Message: Hello LoRa!
12:50:11.219 -> RSSI: -46
12:50:11.252 -> Snr: 9.25
12:50:11.252 ->
12:50:11.526 -> Sending HeLoRa World! 36
12:50:21.731 -> Sending HeLoRa World! 38
12:50:32.696 -> Sending HeLoRa World! 40
12:50:41.741 -> Message: Hello LoRa!
12:50:41.741 -> RSSI: -46
12:50:41.775 -> Snr: 9.25
12:50:41.775 ->
12:50:43.685 -> Sending HeLoRa World! 42
12:50:54.566 -> Sending HeLoRa World! 44
12:51:05.604 -> Sending HeLoRa World! 46
12:51:09.852 -> Message: ⸮LoRaIoT1Maduino2at 85.3,ah 19,wsa 2,wsg 8,wd 150.75,r 0.00,
12:51:09.954 -> RSSI: -71
12:51:09.954 -> Snr: 9.50
12:51:09.954 ->
12:51:12.400 -> Message: Hello LoRa!
12:51:12.400 -> RSSI: -46
12:51:12.433 -> Snr: 9.00
12:51:12.433 ->
12:51:16.511 -> Sending HeLoRa World! 48
12:51:27.530 -> Sending HeLoRa World! 50
12:51:37.796 -> Sending HeLoRa World! 52
12:51:42.968 -> Message: Hello LoRa!
12:51:42.968 -> RSSI: -45
12:51:43.003 -> Snr: 9.25
12:51:43.003 ->
12:51:48.389 -> Sending HeLoRa World! 54
12:51:59.052 -> Sending HeLoRa World! 56
12:52:09.251 -> Sending HeLoRa World! 58
12:52:10.912 -> Message: ⸮LoRaIoT1Maduino2at 85.1,ah 19,wsa 2,wsg 6,wd 84.00,r 0.00,
12:52:11.013 -> RSSI: -70
12:52:11.013 -> Snr: 9.75
12:52:11.013 ->
12:52:13.546 -> Message: Hello LoRa!
12:52:13.546 -> RSSI: -46
12:52:13.581 -> Snr: 9.75
12:52:13.581 ->
This PoC code is getting a bit nasty with magic numbers and no error checking. The next step is getting a basic packet receive working…