Analog Inputs & Pulse Width Modulation
The next step was to figure out how to configure a Pulse Width Modulation (PWM) output and an Analog Input so I could adjust the duty cycle and control the brightness of a Light Emitting Diode(LED).
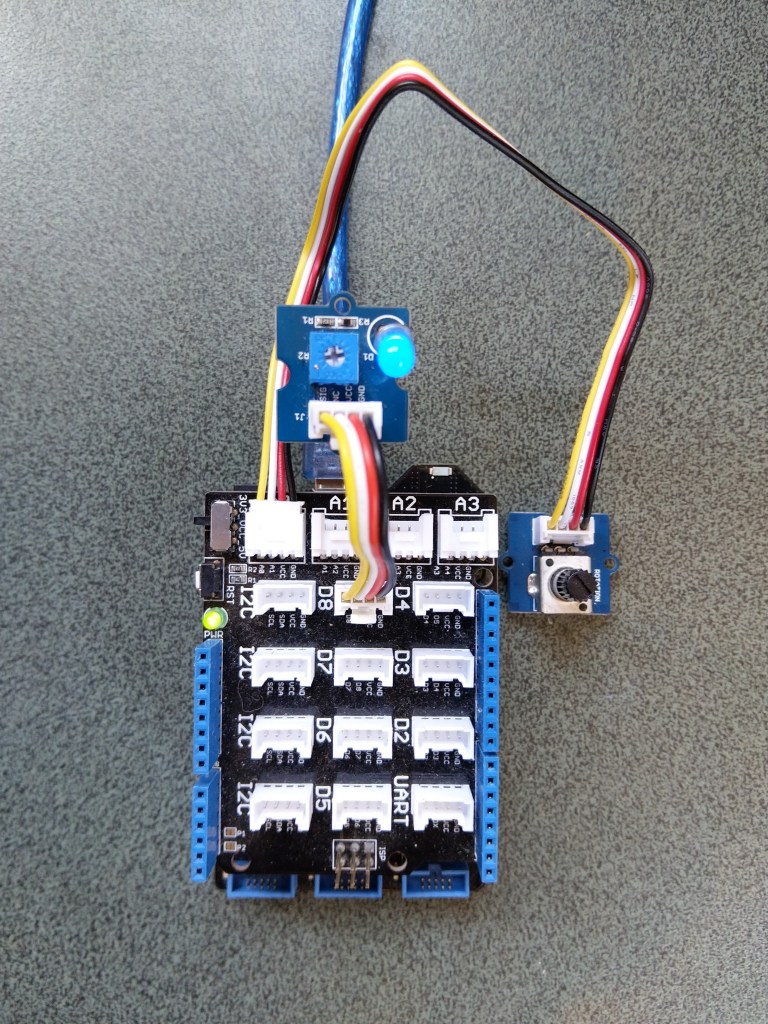
My test rig uses (prices as at Aug 2020) the following parts
- Netduino 3 Wifi
- Grove-Base Shield V2.0 for Arduino USD4.45
- Grove-Universal 4 Pin Bucked 5cm cable(5 PCs Pack) USD1.90
- Grove-Universal 4 Pin Bucked 20cm cable(5 PCs Pack) USD2.90
- Grove-LED Pack USD2.90
- Grove-Rotary Angle Sensor USD2.90
My analog input test harness
public class Program
{
public static void Main()
{
Debug.WriteLine("devMobile.Longboard.AdcTest starting");
Debug.WriteLine(AdcController.GetDeviceSelector());
try
{
AdcController adc = AdcController.GetDefault();
AdcChannel adcChannel = adc.OpenChannel(0);
while (true)
{
double value = adcChannel.ReadRatio();
Debug.WriteLine($"Value: {value:F2}");
Thread.Sleep(100);
}
}
catch (Exception ex)
{
Debug.WriteLine(ex.Message);
}
}
}
The nanoFramework code polls for the rotary angle sensor for its position value every 100mSec.
The setup to use for the Analog to Digital Convertor(ADC) port was determined by looking at the board.h and target_windows_devices_adc_config.cpp file.
//
// Copyright (c) 2018 The nanoFramework project contributors
// See LICENSE file in the project root for full license information.
//
#include <win_dev_adc_native_target.h>
const NF_PAL_ADC_PORT_PIN_CHANNEL AdcPortPinConfig[] = {
// ADC1
{1, GPIOC, 0, ADC_CHANNEL_IN10},
{1, GPIOC, 1, ADC_CHANNEL_IN11},
// ADC2
{2, GPIOC, 2, ADC_CHANNEL_IN14},
{2, GPIOC, 3, ADC_CHANNEL_IN15},
// ADC3
{3, GPIOC, 4, ADC_CHANNEL_IN12},
{3, GPIOC, 5, ADC_CHANNEL_IN13},
// these are the internal sources, available only at ADC1
{1, NULL, 0, ADC_CHANNEL_SENSOR},
{1, NULL, 0, ADC_CHANNEL_VREFINT},
{1, NULL, 0, ADC_CHANNEL_VBAT},
};
const int AdcChannelCount = ARRAYSIZE(AdcPortPinConfig);
The call to AdcController.GetDeviceSelector() only returned one controller
The thread '<No Name>' (0x2) has exited with code 0 (0x0).
devMobile.Longboard.AdcTest starting
ADC1
After some experimentation it appears that only A0 & A1 work on a Netduino. (Aug 2020).
My PWM test harness
public class Program
{
public static void Main()
{
Debug.WriteLine("devMobile.Longboard.PwmTest starting");
Debug.WriteLine(PwmController.GetDeviceSelector());
try
{
PwmController pwm = PwmController.FromId("TIM5");
AdcController adc = AdcController.GetDefault();
AdcChannel adcChannel = adc.OpenChannel(0);
PwmPin pwmPin = pwm.OpenPin(PinNumber('A', 0));
pwmPin.Controller.SetDesiredFrequency(1000);
pwmPin.Start();
while (true)
{
double value = adcChannel.ReadRatio();
Debug.WriteLine(value.ToString("F2"));
pwmPin.SetActiveDutyCyclePercentage(value);
Thread.Sleep(100);
}
}
catch (Exception ex)
{
Debug.WriteLine(ex.Message);
}
}
private static int PinNumber(char port, byte pin)
{
if (port < 'A' || port > 'J')
throw new ArgumentException();
return ((port - 'A') * 16) + pin;
}
}
I had to refer to the Netduino schematic to figure out pin mapping
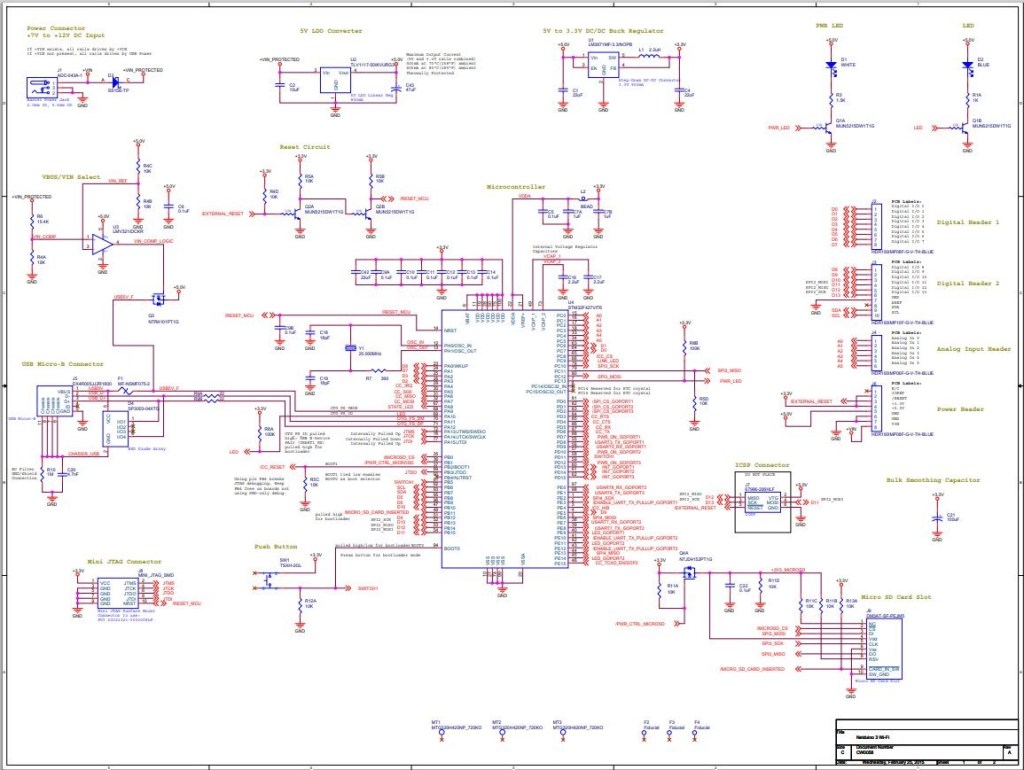
With my test rig (with easy access to D0 thru D8) I found that only D2,D3,D7 and D8 work as PWM outputs.
The next test rig will be getting Servo working.
