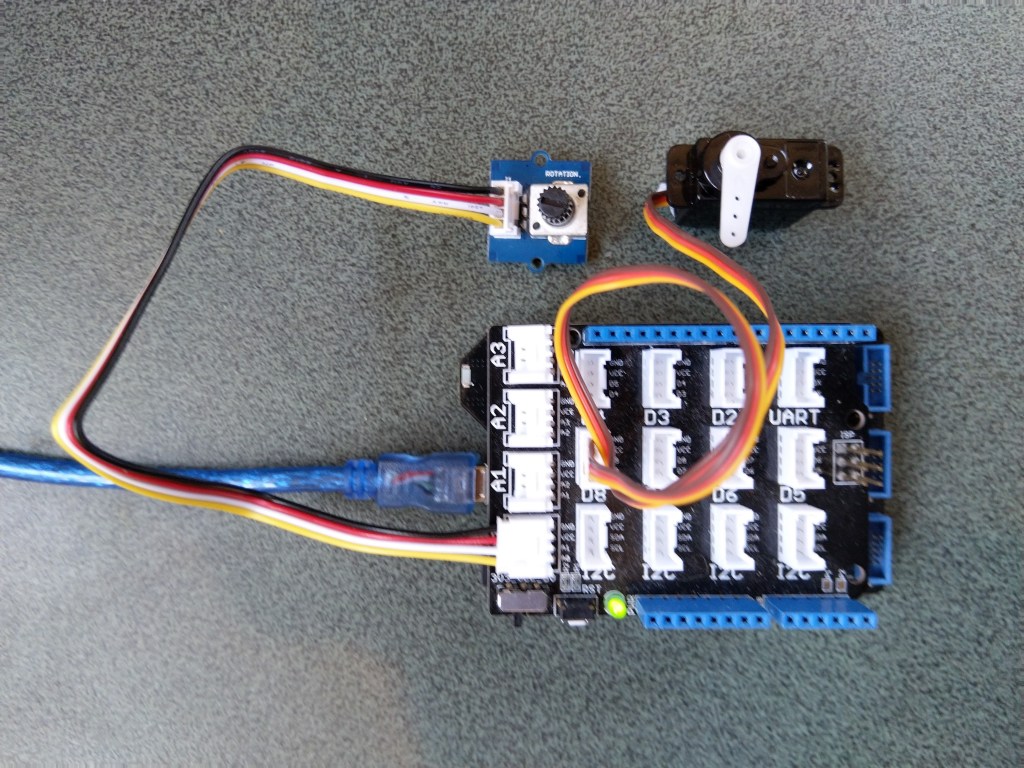
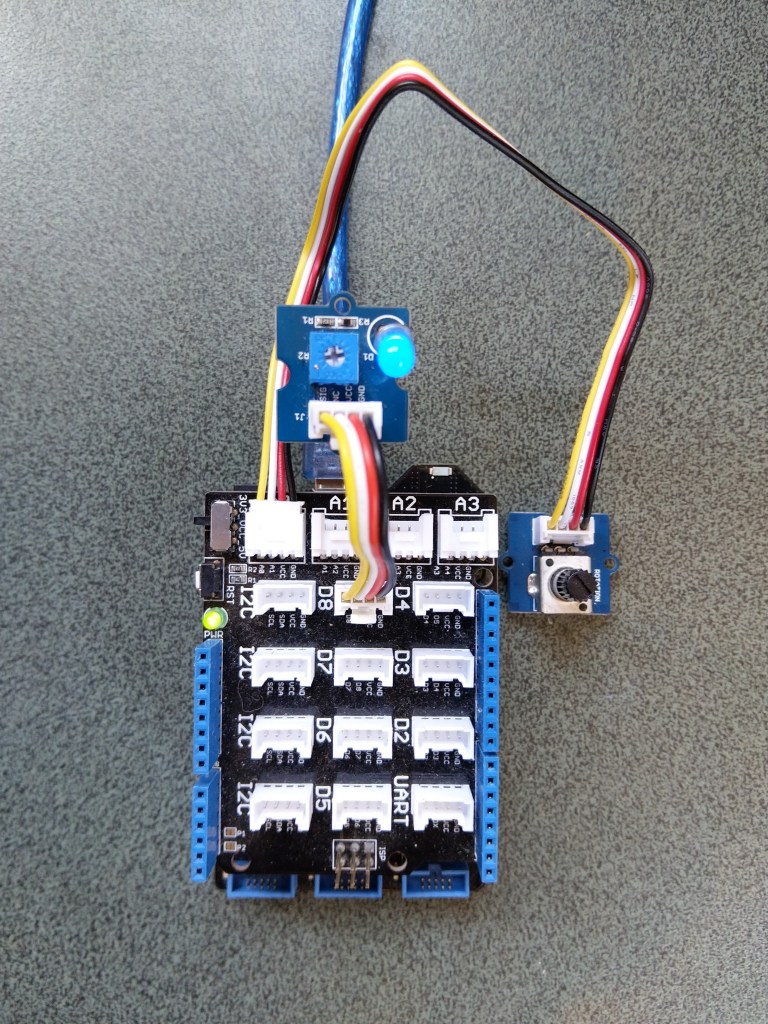
Over the weekend I ported my Windows 10 IoT Core library for Seeedstudio Grove Base Hat for RPI Zero and Grove Base Hat for Raspberry Pi to .NET Core 5.

I have included sample application to show how to use the library
namespace devMobile.IoT.NetCore.GroveBaseHat
{
using System;
using System.Device.I2c;
using System.Threading;
class Program
{
static void Main(string[] args)
{
// bus id on the raspberry pi 3
const int busId = 1;
I2cConnectionSettings i2cConnectionSettings = new(busId, AnalogPorts.DefaultI2cAddress);
using (I2cDevice i2cDevice = I2cDevice.Create(i2cConnectionSettings))
using (AnalogPorts AnalogPorts = new AnalogPorts(i2cDevice))
{
Console.WriteLine($"{DateTime.Now:HH:mm:SS} Version:{AnalogPorts.Version()}");
Console.WriteLine();
double powerSupplyVoltage = AnalogPorts.PowerSupplyVoltage();
Console.WriteLine($"{DateTime.Now:HH:mm:SS} Power Supply Voltage:{powerSupplyVoltage:F2}v");
while (true)
{
double value = AnalogPorts.Read(AnalogPorts.AnalogPort.A0);
double rawValue = AnalogPorts.ReadRaw(AnalogPorts.AnalogPort.A0);
double voltageValue = AnalogPorts.ReadVoltage(AnalogPorts.AnalogPort.A0);
Console.WriteLine($"{DateTime.Now:HH:mm:SS} Value:{value:F2} Raw:{rawValue:F2} Voltage:{voltageValue:F2}v");
Console.WriteLine();
Thread.Sleep(1000);
}
}
}
}
}
The GROVE_BASE_HAT_RPI and GROVE_BASE_HAT_RPI_ZERO are used to specify the number of available analog ports.