Random wanderings through Microsoft Azure esp. PaaS plumbing, the IoT bits, AI on Micro controllers, AI on Edge Devices, .NET nanoFramework, .NET Core on *nix and ML.NET+ONNX
When I first ran the code no data was received so I doubled checked the serial connections and figured out I had to modify the cable and reverse the TX and RX pins.
The next step was to figure out how to configure a Pulse Width Modulation (PWM) output and an Analog Input so I could adjust the duty cycle and control the brightness of a Light Emitting Diode(LED).
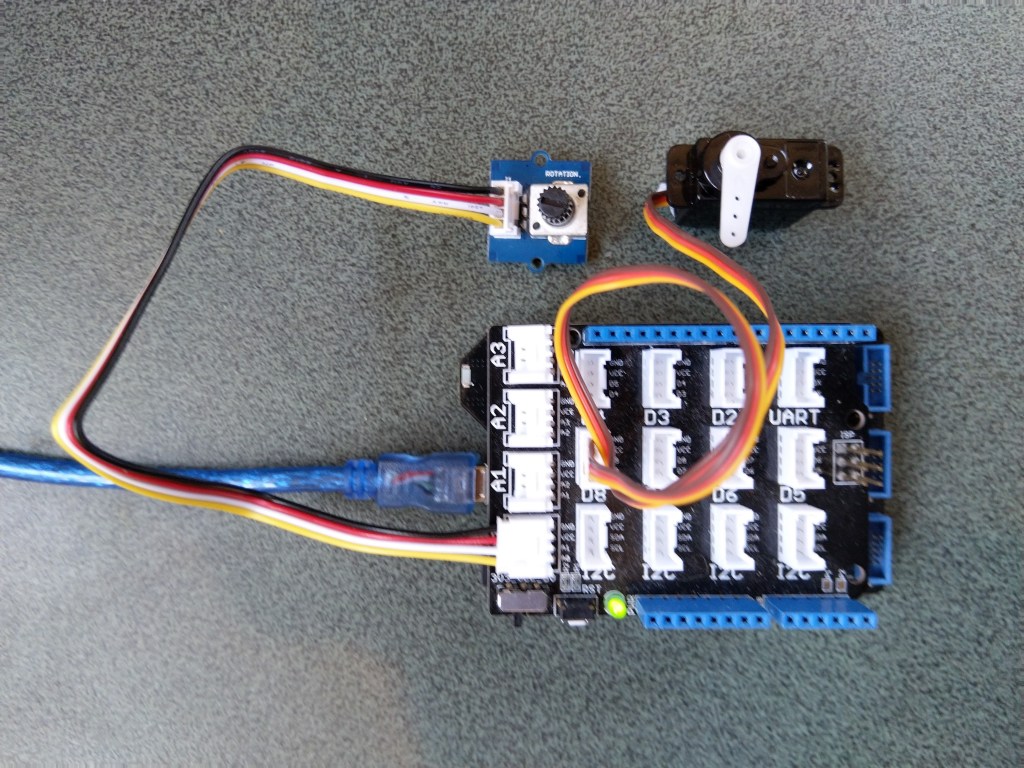
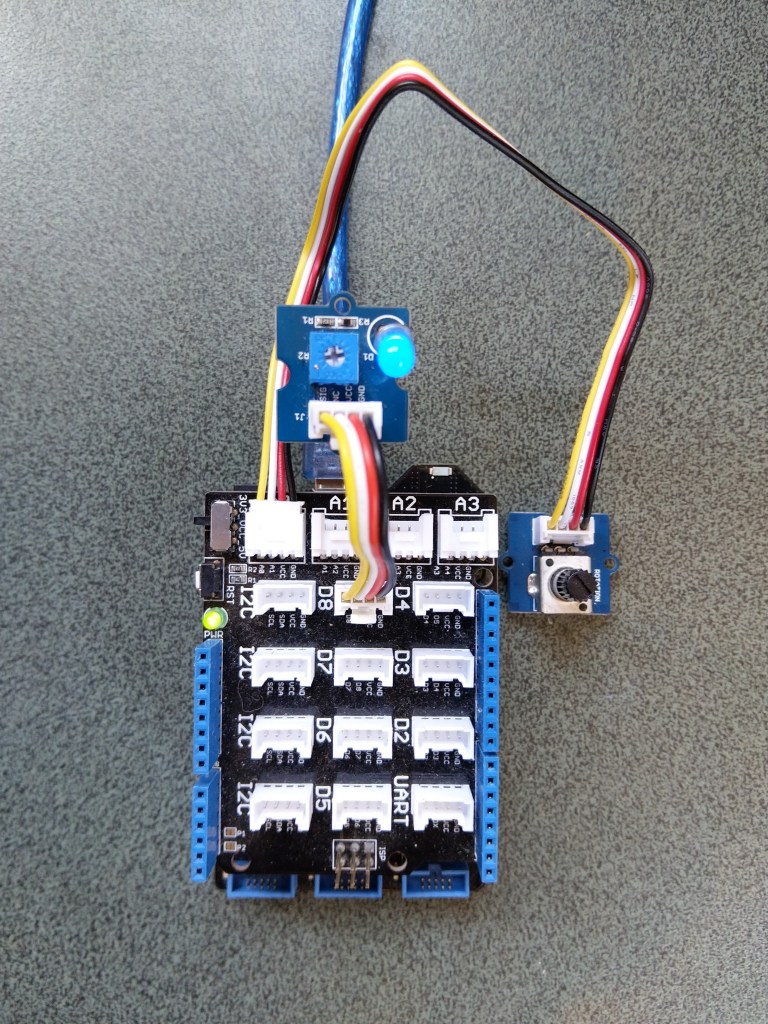
Netduino 3 ADC & PWN test rig
My test rig uses (prices as at Aug 2020) the following parts
public class Program
{
public static void Main()
{
Debug.WriteLine("devMobile.Longboard.AdcTest starting");
Debug.WriteLine(AdcController.GetDeviceSelector());
try
{
AdcController adc = AdcController.GetDefault();
AdcChannel adcChannel = adc.OpenChannel(0);
while (true)
{
double value = adcChannel.ReadRatio();
Debug.WriteLine($"Value: {value:F2}");
Thread.Sleep(100);
}
}
catch (Exception ex)
{
Debug.WriteLine(ex.Message);
}
}
}
The nanoFramework code polls for the rotary angle sensor for its position value every 100mSec.
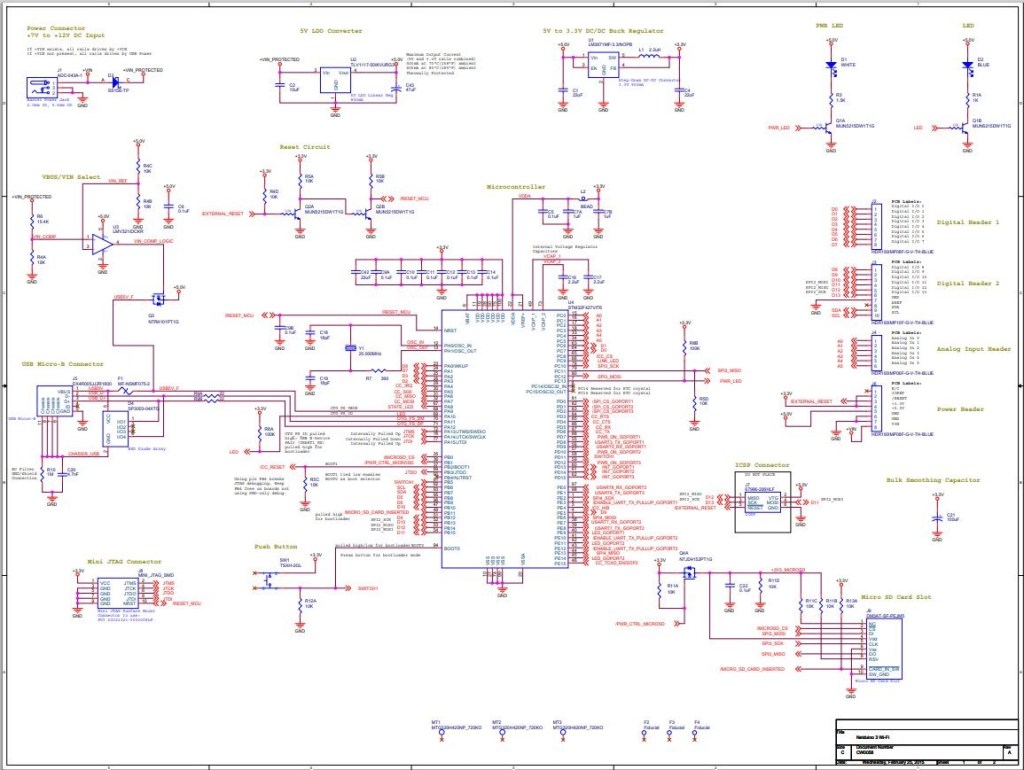
The setup to use for the Analog to Digital Convertor(ADC) port was determined by looking at the board.h and target_windows_devices_adc_config.cpp file.
//
// Copyright (c) 2018 The nanoFramework project contributors
// See LICENSE file in the project root for full license information.
//
#include <win_dev_adc_native_target.h>
const NF_PAL_ADC_PORT_PIN_CHANNEL AdcPortPinConfig[] = {
// ADC1
{1, GPIOC, 0, ADC_CHANNEL_IN10},
{1, GPIOC, 1, ADC_CHANNEL_IN11},
// ADC2
{2, GPIOC, 2, ADC_CHANNEL_IN14},
{2, GPIOC, 3, ADC_CHANNEL_IN15},
// ADC3
{3, GPIOC, 4, ADC_CHANNEL_IN12},
{3, GPIOC, 5, ADC_CHANNEL_IN13},
// these are the internal sources, available only at ADC1
{1, NULL, 0, ADC_CHANNEL_SENSOR},
{1, NULL, 0, ADC_CHANNEL_VREFINT},
{1, NULL, 0, ADC_CHANNEL_VBAT},
};
const int AdcChannelCount = ARRAYSIZE(AdcPortPinConfig);
The call to AdcController.GetDeviceSelector() only returned one controller
The thread '<No Name>' (0x2) has exited with code 0 (0x0).
devMobile.Longboard.AdcTest starting
ADC1
After some experimentation it appears that only A0 & A1 work on a Netduino. (Aug 2020).
My PWM test harness
public class Program
{
public static void Main()
{
Debug.WriteLine("devMobile.Longboard.PwmTest starting");
Debug.WriteLine(PwmController.GetDeviceSelector());
try
{
PwmController pwm = PwmController.FromId("TIM5");
AdcController adc = AdcController.GetDefault();
AdcChannel adcChannel = adc.OpenChannel(0);
PwmPin pwmPin = pwm.OpenPin(PinNumber('A', 0));
pwmPin.Controller.SetDesiredFrequency(1000);
pwmPin.Start();
while (true)
{
double value = adcChannel.ReadRatio();
Debug.WriteLine(value.ToString("F2"));
pwmPin.SetActiveDutyCyclePercentage(value);
Thread.Sleep(100);
}
}
catch (Exception ex)
{
Debug.WriteLine(ex.Message);
}
}
private static int PinNumber(char port, byte pin)
{
if (port < 'A' || port > 'J')
throw new ArgumentException();
return ((port - 'A') * 16) + pin;
}
}
I had to refer to the Netduino schematic to figure out pin mapping
With my test rig (with easy access to D0 thru D8) I found that only D2,D3,D7 and D8 work as PWM outputs.
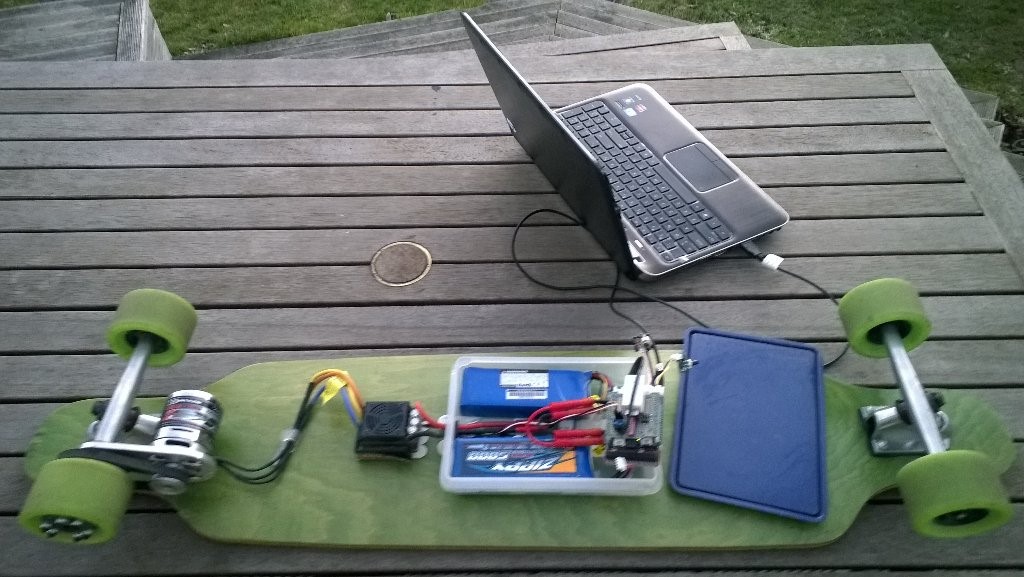
Roughly four years ago I build myself an electric longboard as summer transport. It initially had a controller built with a devDuino V2.2 which after a while I “upgraded” to a GHI Electronics.NET Microframework device.
Configuring the original netMF based longboard
Now that GHI Electronics no longer supports the FEZ Panda III I figured upgrading to a device that runs the nanoFramework would be a good compromise.
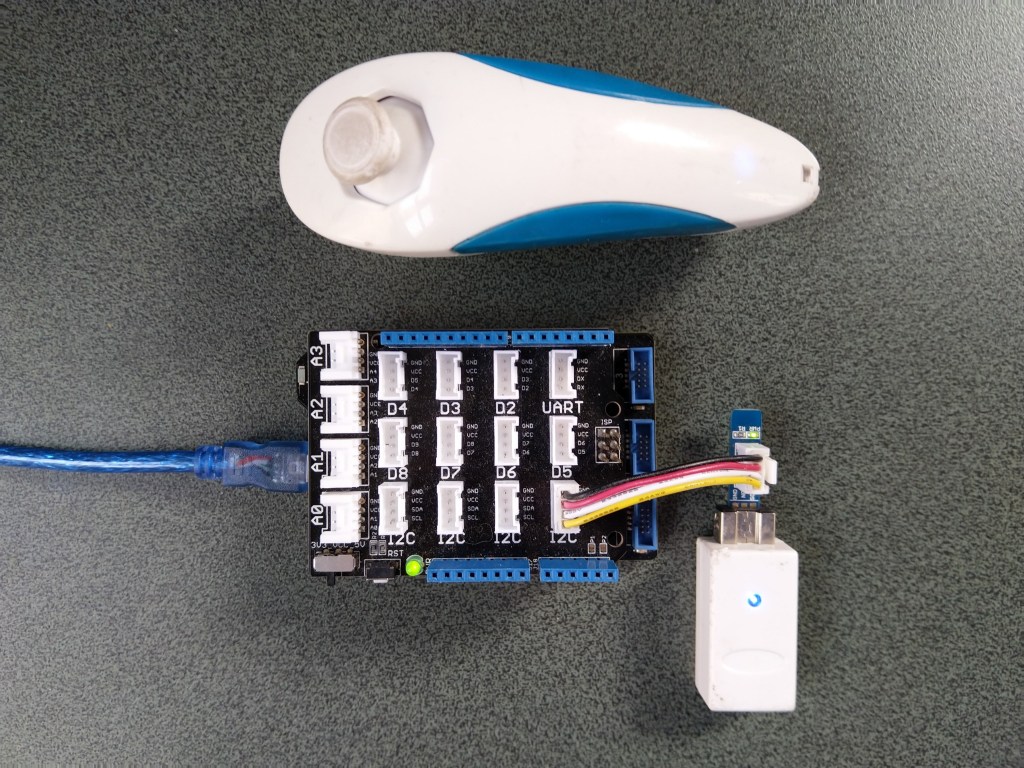
My changes were mainly related to the Inter Integrated Circuit(I2C) configuration and the reading+writing of registers.
/// <summary>
/// Initialises a new Wii Nunchuk
/// </summary>
/// <param name="busId">The unique identifier of the I²C to use.</param>
/// <param name="slaveAddress">The I²C address</param>
/// <param name="busSpeed">The bus speed, an enumeration that defaults to StandardMode</param>
/// <param name="sharingMode">The sharing mode, an enumeration that defaults to Shared.</param>
public WiiNunchuk(string busId, ushort slaveAddress = 0x52, I2cBusSpeed busSpeed = I2cBusSpeed.StandardMode, I2cSharingMode sharingMode = I2cSharingMode.Shared)
{
I2cTransferResult result;
// This initialisation routine seems to work. I got it at http://wiibrew.org/wiki/Wiimote/Extension_Controllers#The_New_Way
Device = I2cDevice.FromId(busId, new I2cConnectionSettings(slaveAddress)
{
BusSpeed = busSpeed,
SharingMode = sharingMode,
});
result = Device.WritePartial(new byte[] { 0xf0, 0x55 });
if (result.Status != I2cTransferStatus.FullTransfer)
{
throw new ApplicationException("Something went wrong reading the Nunchuk. Did you use proper pull-up resistors?");
}
result = Device.WritePartial(new byte[] { 0xfb, 0x00 });
if (result.Status != I2cTransferStatus.FullTransfer)
{
throw new ApplicationException("Something went wrong reading the Nunchuk. Did you use proper pull-up resistors?");
}
this.Device.Write(new byte[] { 0xf0, 0x55 });
this.Device.Write(new byte[] { 0xfb, 0x00 });
}
/// <summary>
/// Reads all data from the nunchuk
/// </summary>
public void Read()
{
byte[] WaitWriteBuffer = { 0 };
I2cTransferResult result;
result = Device.WritePartial(WaitWriteBuffer);
if (result.Status != I2cTransferStatus.FullTransfer)
{
throw new ApplicationException("Something went wrong reading the Nunchuk. Did you use proper pull-up resistors?");
}
byte[] ReadBuffer = new byte[6];
result = Device.ReadPartial(ReadBuffer);
if (result.Status != I2cTransferStatus.FullTransfer)
{
throw new ApplicationException("Something went wrong reading the Nunchuk. Did you use proper pull-up resistors?");
}
// Parses data according to http://wiibrew.org/wiki/Wiimote/Extension_Controllers/Nunchuck#Data_Format
// Analog stick
this.AnalogStickX = ReadBuffer[0];
this.AnalogStickY = ReadBuffer[1];
// Accelerometer
ushort AX = (ushort)(ReadBuffer[2] << 2);
ushort AY = (ushort)(ReadBuffer[3] << 2);
ushort AZ = (ushort)(ReadBuffer[4] << 2);
AZ += (ushort)((ReadBuffer[5] & 0xc0) >> 6); // 0xc0 = 11000000
AY += (ushort)((ReadBuffer[5] & 0x30) >> 4); // 0x30 = 00110000
AX += (ushort)((ReadBuffer[5] & 0x0c) >> 2); // 0x0c = 00001100
this.AcceleroMeterX = AX;
this.AcceleroMeterY = AY;
this.AcceleroMeterZ = AZ;
// Buttons
ButtonC = (ReadBuffer[5] & 0x02) != 0x02; // 0x02 = 00000010
ButtonZ = (ReadBuffer[5] & 0x01) != 0x01; // 0x01 = 00000001
}
The nanoFramework code polls for the joystick position and accelerometer values every 100mSec
public class Program
{
public static void Main()
{
Debug.WriteLine("devMobile.Longboard.WiiNunchuckTest starting");
Debug.WriteLine(I2cDevice.GetDeviceSelector());
try
{
WiiNunchuk nunchuk = new WiiNunchuk("I2C1");
while (true)
{
nunchuk.Read();
Debug.WriteLine($"JoyX: {nunchuk.AnalogStickX} JoyY:{nunchuk.AnalogStickY} AX:{nunchuk.AcceleroMeterX} AY:{nunchuk.AcceleroMeterY} AZ:{nunchuk.AcceleroMeterZ} BtnC:{nunchuk.ButtonC} BtnZ:{nunchuk.ButtonZ}");
Thread.Sleep(100);
}
}
catch (Exception ex)
{
Debug.WriteLine(ex.Message);
}
}
}
The setup to use for the I2C port was determined by looking at the board.h and target_windows_devices_I2C_config.cpp file
//
// Copyright (c) 2018 The nanoFramework project contributors
// See LICENSE file in the project root for full license information.
//
#include <win_dev_i2c_native_target.h>
//////////
// I2C1 //
//////////
// pin configuration for I2C1
// port for SCL pin is: GPIOB
// port for SDA pin is: GPIOB
// SCL pin: is GPIOB_6
// SDA pin: is GPIOB_7
// GPIO alternate pin function is 4 (see alternate function mapping table in device datasheet)
I2C_CONFIG_PINS(1, GPIOB, GPIOB, 6, 7, 4)
Then checking this against the Netduino 3 Wifi schematic.
After some experimentation with how to detect if an I2C read or write had failed the debugging console output began displaying reasonable value
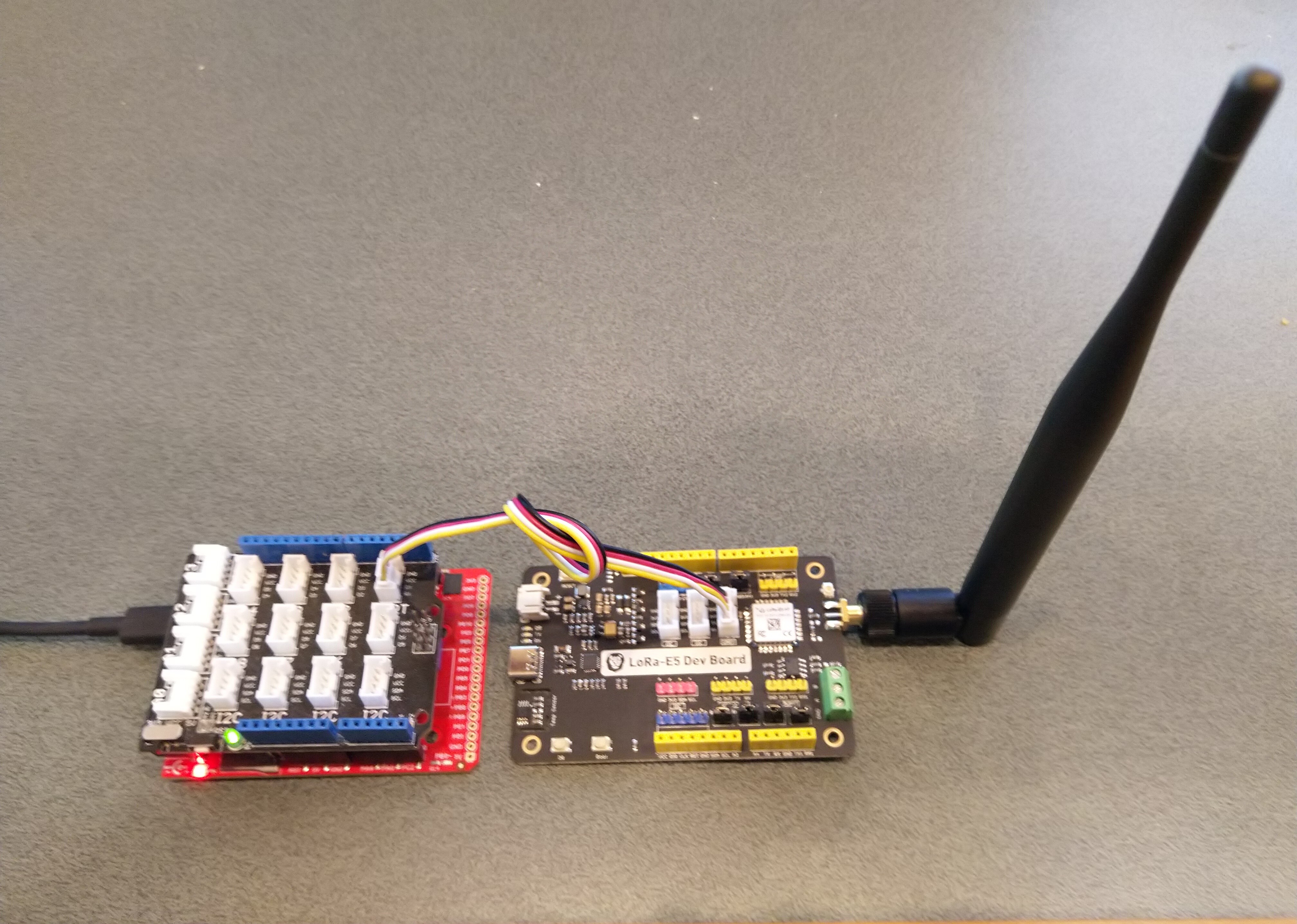
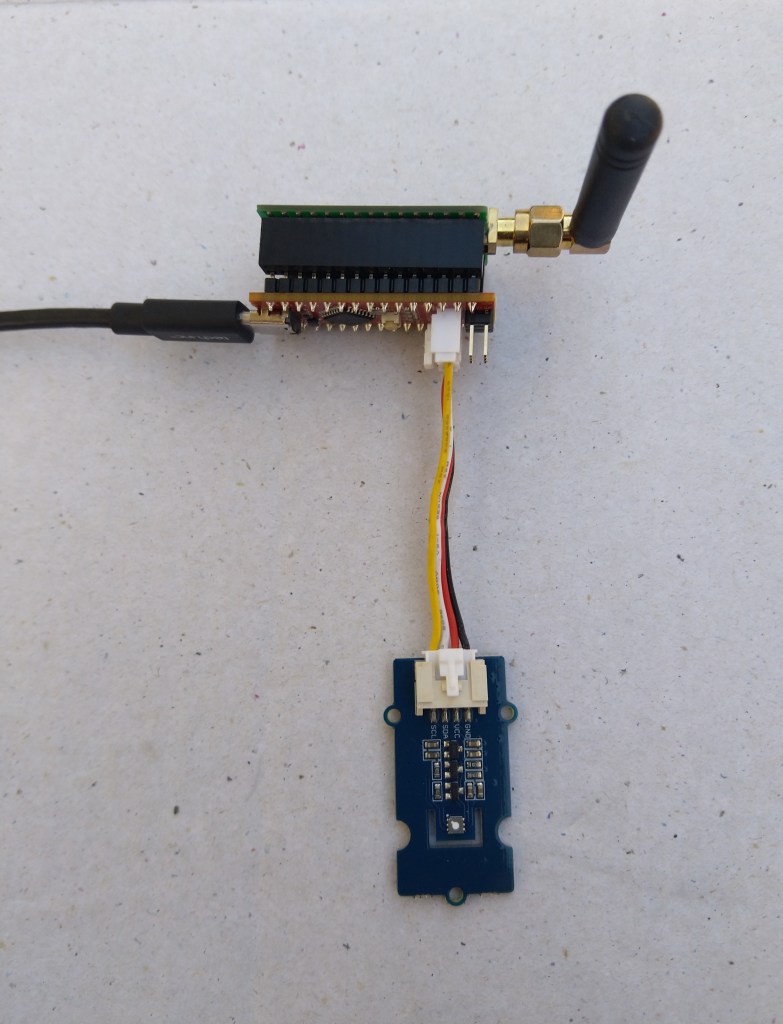
Seeeduino Nano easySensors shield and Grove VOC & eCO2 Sensor
Seeeduino Nano devices have a single on-board I2C socket which meant I didn’t need a Grove Shield for Arduino Nano which reduced the size and cost of the sensor node.
My first attempt failed with an issues accessing an Analog port to read the serial number from the Microchip ATSHA204 security chip. After looking at the Seeed SGP30 library source code (based on Sensiron samples) I think the my Nano device was running out of memory. I then searched for other Arduino compatible SGP30 libraries and rebuilt he application with the one from Sparkfun,
/*
Copyright ® 2019 August devMobile Software, All Rights Reserved
THIS CODE AND INFORMATION IS PROVIDED "AS IS" WITHOUT WARRANTY OF ANY
KIND, EITHER EXPRESSED OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE
IMPLIED WARRANTIES OF MERCHANTABILITY AND/OR FITNESS FOR A PARTICULAR
PURPOSE.
You can do what you want with this code, acknowledgment would be nice.
http://www.devmobile.co.nz
Seeedstudio Grove - VOC and eCO2 Gas Sensor (SGP30)
https://www.seeedstudio.com/Grove-VOC-and-eCO2-Gas-Sensor-SGP30-p-3071.html
Seeeduino Nano
https://www.seeedstudio.com/Seeeduino-Nano-p-4111.html
Polycarbonate enclosure approx 3.5" x 4.5"
2 x Cable glands
1 x Grommet to seal SMA antenna connector
3M command adhesive strips to hold battery & device in place
*/
#include <stdlib.h>
#include "SparkFun_SGP30_Arduino_Library.h"
#include <LoRa.h>
#include <sha204_library.h>
//#define DEBUG
//#define DEBUG_TELEMETRY
//#define DEBUG_LORA
#define DEBUG_VOC_AND_CO2
#define UNITS_VOC "ppb"
#define UNITS_CO2 "ppm"
// LoRa field gateway configuration (these settings must match your field gateway)
const byte DeviceAddressMaximumLength = 15 ;
const char FieldGatewayAddress[] = {"LoRaIoT1"};
const float FieldGatewayFrequency = 915000000.0;
const byte FieldGatewaySyncWord = 0x12 ;
// Payload configuration
const int ChipSelectPin = 10;
const int ResetPin = 9;
const int InterruptPin = 2;
// LoRa radio payload configuration
const byte SensorIdValueSeperator = ' ' ;
const byte SensorReadingSeperator = ',' ;
const unsigned long SensorUploadDelay = 60000;
// ATSHA204 secure authentication, validation with crypto and hashing (currently only using for unique serial number)
const byte Atsha204Port = A3;
atsha204Class sha204(Atsha204Port);
const byte DeviceSerialNumberLength = 9 ;
byte deviceSerialNumber[DeviceSerialNumberLength] = {""};
SGP30 mySensor; //create an object of the SGP30 class
const byte PayloadSizeMaximum = 64 ;
byte payload[PayloadSizeMaximum];
byte payloadLength = 0 ;
void setup()
{
Serial.begin(9600);
#ifdef DEBUG
while (!Serial);
#endif
Serial.println("Setup called");
Serial.print("Field gateway:");
Serial.print(FieldGatewayAddress ) ;
Serial.print(" Frequency:");
Serial.print( FieldGatewayFrequency,0 ) ;
Serial.print("MHz SyncWord:");
Serial.print( FieldGatewaySyncWord ) ;
Serial.println();
// Retrieve the serial number then display it nicely
if(sha204.getSerialNumber(deviceSerialNumber))
{
Serial.println("sha204.getSerialNumber failed");
while (true); // Drop into endless loop requiring restart
}
Serial.print("SNo:");
DisplayHex( deviceSerialNumber, DeviceSerialNumberLength);
Serial.println();
Serial.println("LoRa setup start");
// override the default chip select and reset pins
LoRa.setPins(ChipSelectPin, ResetPin, InterruptPin);
if (!LoRa.begin(FieldGatewayFrequency))
{
Serial.println("LoRa begin failed");
while (true); // Drop into endless loop requiring restart
}
// Need to do this so field gateway pays attention to messsages from this device
LoRa.enableCrc();
LoRa.setSyncWord(FieldGatewaySyncWord);
#ifdef DEBUG_LORA
LoRa.dumpRegisters(Serial);
#endif
Serial.println("LoRa Setup done.");
// Configure the DF Robot SHT20, temperature & humidity sensor
Serial.println("SGP30 setup start");
Wire.begin();
if(mySensor.begin() == false)
{
Serial.println("SQP-30 initialisation failed");
while (true); // Drop into endless loop requiring restart
}
mySensor.initAirQuality();
delay(1000);
Serial.println("SGP30 setup done");
PayloadHeader((byte *)FieldGatewayAddress,strlen(FieldGatewayAddress), deviceSerialNumber, DeviceSerialNumberLength);
Serial.println("Setup done");
Serial.println();
}
void loop()
{
unsigned long currentMilliseconds = millis();
Serial.println("Loop called");
mySensor.measureAirQuality();
PayloadReset();
PayloadAdd( "v", mySensor.TVOC, false);
PayloadAdd( "c", mySensor.CO2, false);
#ifdef DEBUG_VOC_AND_CO2
Serial.print("VoC:");
Serial.print( mySensor.TVOC ) ;
Serial.print( UNITS_VOC ) ;
Serial.print(" Co2:");
Serial.print( mySensor.CO2 ) ;
Serial.println( UNITS_CO2 ) ;
#endif
#ifdef DEBUG_TELEMETRY
Serial.println();
Serial.print("RFM9X/SX127X Payload length:");
Serial.print(payloadLength);
Serial.println(" bytes");
#endif
LoRa.beginPacket();
LoRa.write(payload, payloadLength);
LoRa.endPacket();
Serial.println("Loop done");
Serial.println();
delay(SensorUploadDelay - (millis() - currentMilliseconds ));
}
void PayloadHeader( const byte *to, byte toAddressLength, const byte *from, byte fromAddressLength)
{
byte addressesLength = toAddressLength + fromAddressLength ;
payloadLength = 0 ;
// prepare the payload header with "To" Address length (top nibble) and "From" address length (bottom nibble)
payload[payloadLength] = (toAddressLength << 4) | fromAddressLength ;
payloadLength += 1;
// Copy the "To" address into payload
memcpy(&payload[payloadLength], to, toAddressLength);
payloadLength += toAddressLength ;
// Copy the "From" into payload
memcpy(&payload[payloadLength], from, fromAddressLength);
payloadLength += fromAddressLength ;
}
void PayloadAdd( const char *sensorId, float value, byte decimalPlaces, bool last)
{
byte sensorIdLength = strlen( sensorId ) ;
memcpy( &payload[payloadLength], sensorId, sensorIdLength) ;
payloadLength += sensorIdLength ;
payload[ payloadLength] = SensorIdValueSeperator;
payloadLength += 1 ;
payloadLength += strlen( dtostrf(value, -1, decimalPlaces, (char *)&payload[payloadLength]));
if (!last)
{
payload[ payloadLength] = SensorReadingSeperator;
payloadLength += 1 ;
}
#ifdef DEBUG_TELEMETRY
Serial.print("PayloadAdd float-payloadLength:");
Serial.print( payloadLength);
Serial.println( );
#endif
}
void PayloadAdd( char *sensorId, int value, bool last )
{
byte sensorIdLength = strlen(sensorId) ;
memcpy(&payload[payloadLength], sensorId, sensorIdLength) ;
payloadLength += sensorIdLength ;
payload[ payloadLength] = SensorIdValueSeperator;
payloadLength += 1 ;
payloadLength += strlen(itoa( value,(char *)&payload[payloadLength],10));
if (!last)
{
payload[ payloadLength] = SensorReadingSeperator;
payloadLength += 1 ;
}
#ifdef DEBUG_TELEMETRY
Serial.print("PayloadAdd int-payloadLength:" );
Serial.print(payloadLength);
Serial.println( );
#endif
}
void PayloadAdd( char *sensorId, unsigned int value, bool last )
{
byte sensorIdLength = strlen(sensorId) ;
memcpy(&payload[payloadLength], sensorId, sensorIdLength) ;
payloadLength += sensorIdLength ;
payload[ payloadLength] = SensorIdValueSeperator;
payloadLength += 1 ;
payloadLength += strlen(utoa( value,(char *)&payload[payloadLength],10));
if (!last)
{
payload[ payloadLength] = SensorReadingSeperator;
payloadLength += 1 ;
}
#ifdef DEBUG_TELEMETRY
Serial.print("PayloadAdd uint-payloadLength:");
Serial.print(payloadLength);
Serial.println( );
#endif
}
void PayloadReset()
{
byte fromAddressLength = payload[0] & 0xf ;
byte toAddressLength = payload[0] >> 4 ;
payloadLength = toAddressLength + fromAddressLength + 1;
}
void DisplayHex( byte *byteArray, byte length)
{
for (int i = 0; i < length ; i++)
{
// Add a leading zero
if ( byteArray[i] < 16)
{
Serial.print("0");
}
Serial.print(byteArray[i], HEX);
if ( i < (length-1)) // Don't put a - after last digit
{
Serial.print("-");
}
}
}
To configure the device in Azure IoT Central (similar process for Adafruit.IO, working on support for losant, and ubidots) I copied the SNo: from the Arduino development tool logging window and appended c for the CO2 parts per million (ppm), v for VOC parts per billion (ppb) unique serial number from the ATSHA204A chip. (N.B. pay attention to the case of the field names they are case sensitive)
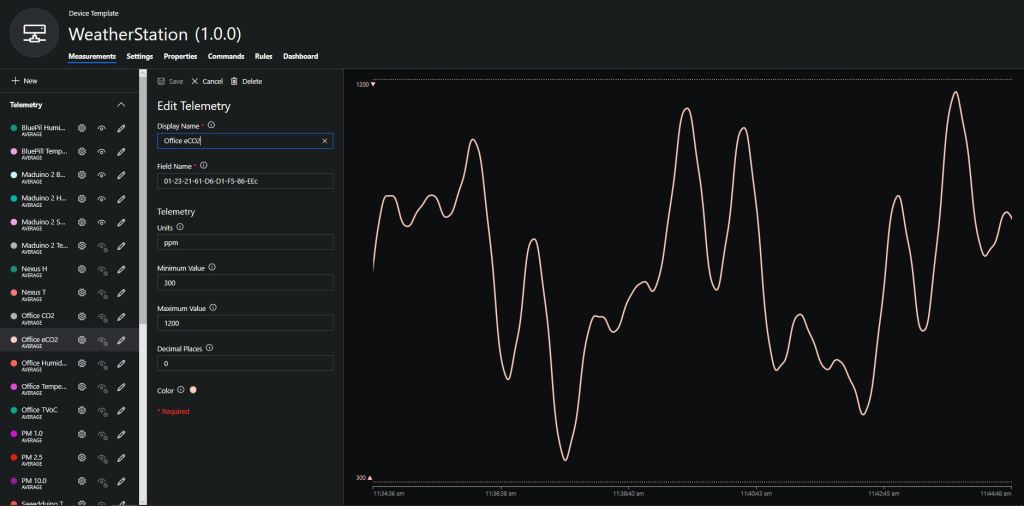
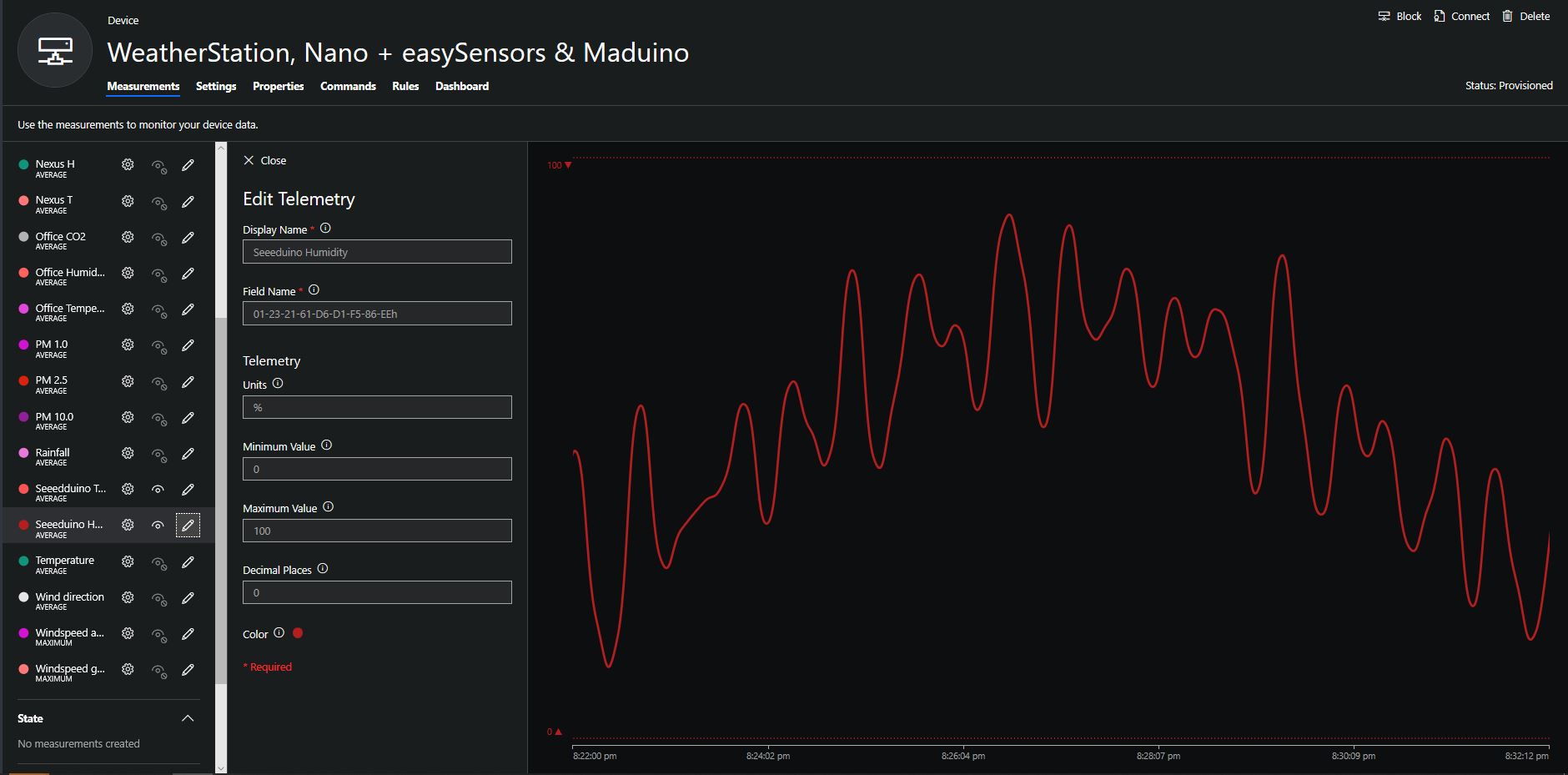
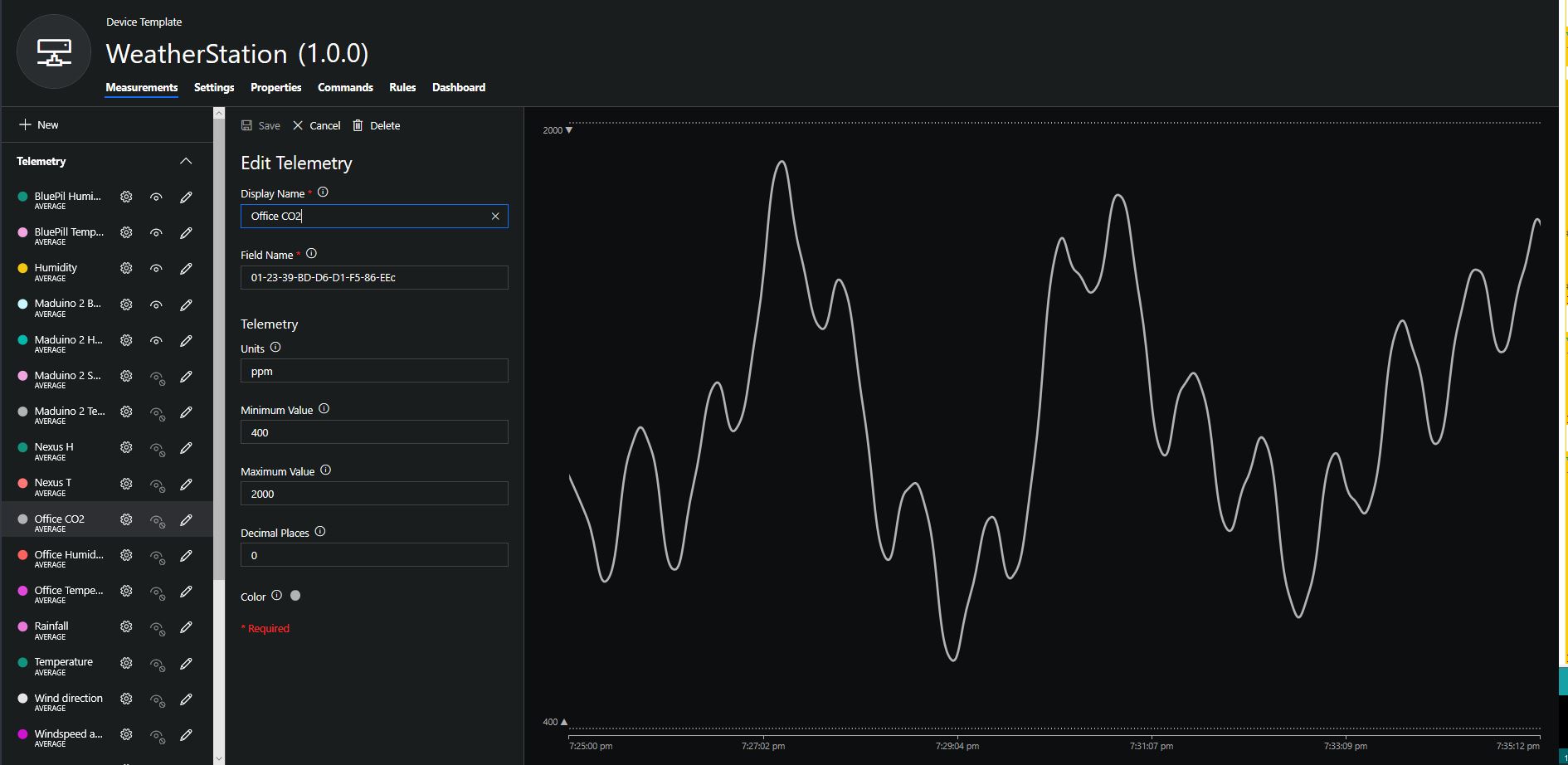
Azure IoT Central configuration
Overall the performance of the VoC sensor data is looking pretty positive, the eCO2 readings need some further investigation as they track the VOC levels. The large spike in the graph below is me putting an open vivid marker on my desk near the sensor.
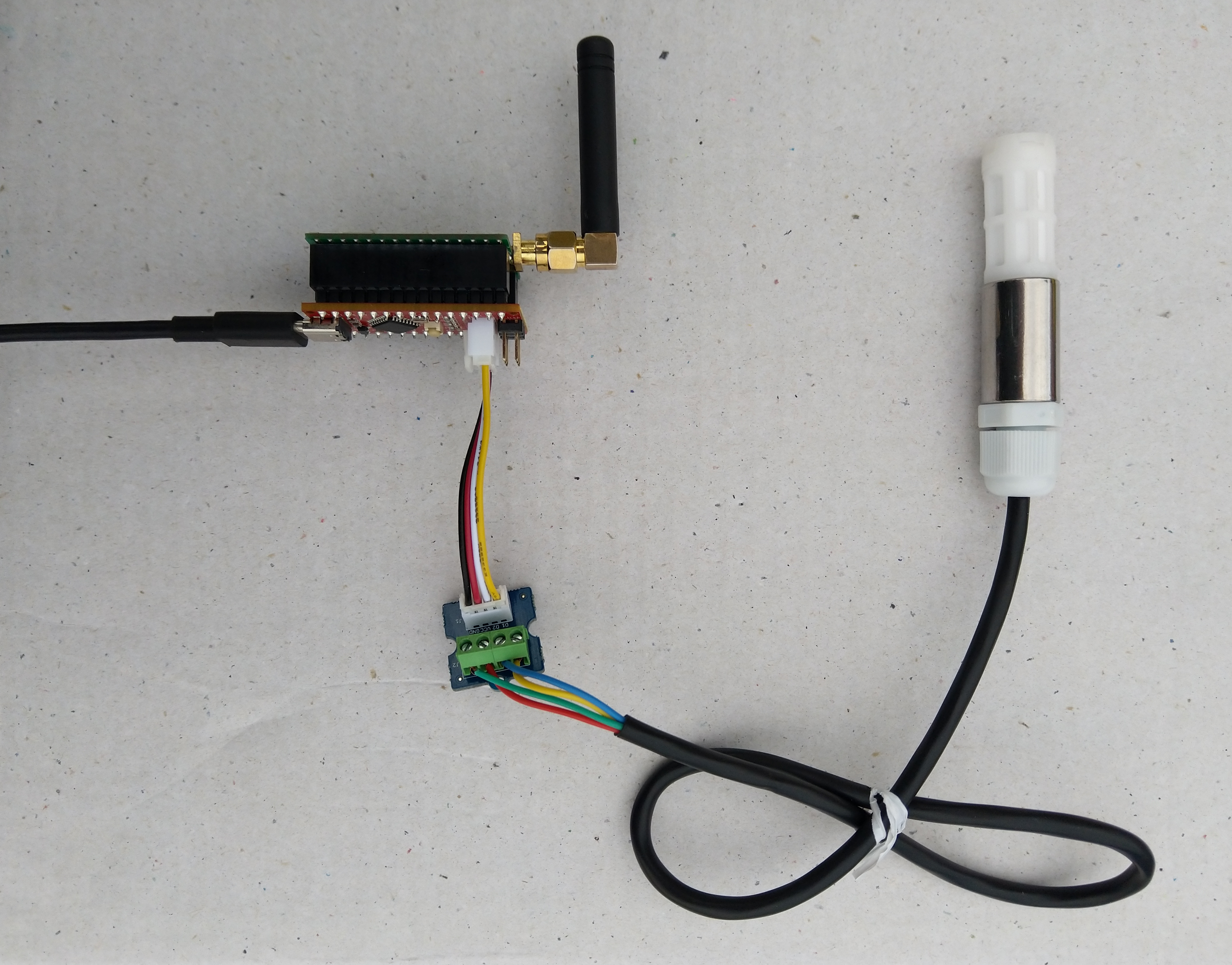
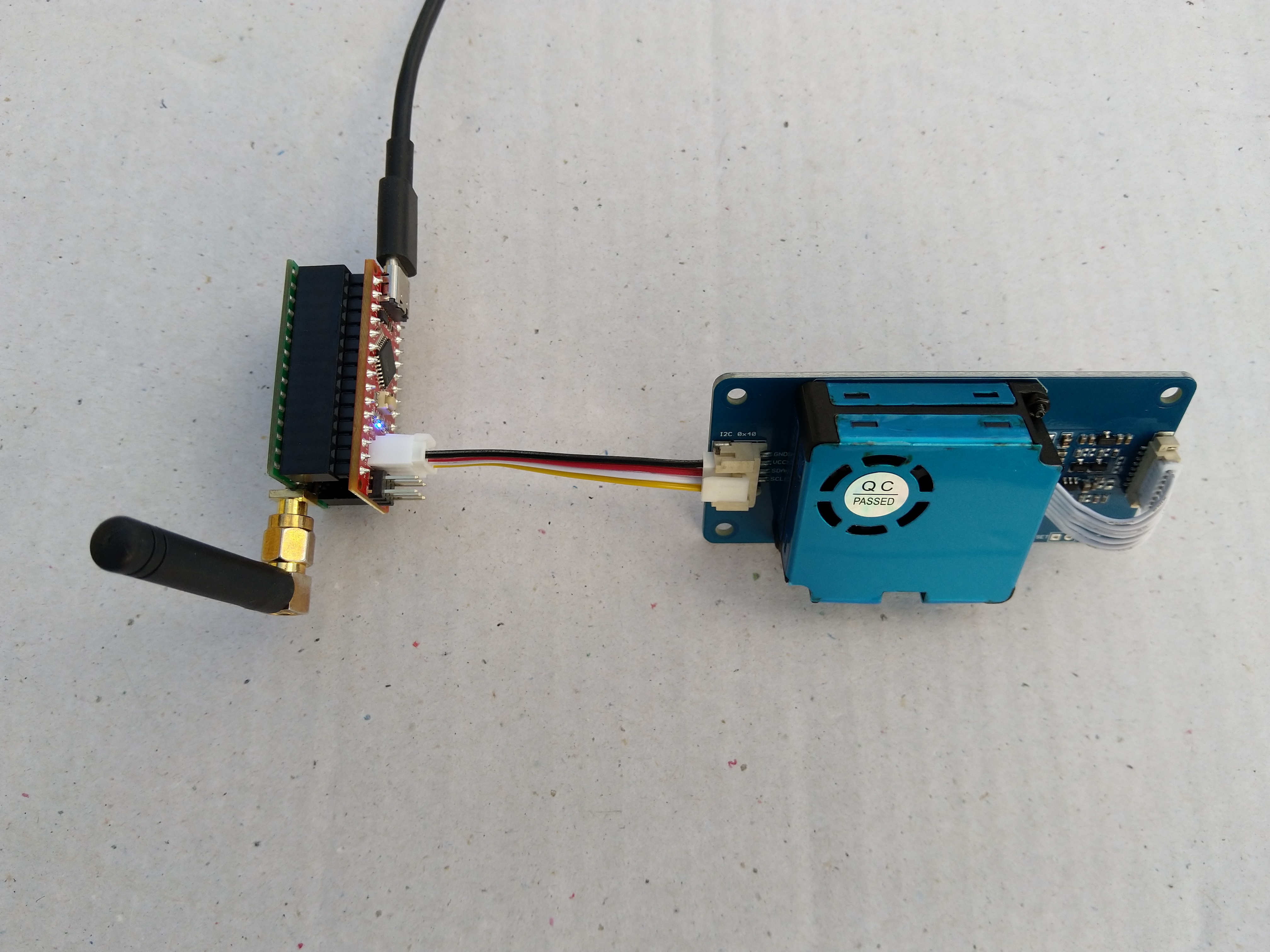
Seeeduino Nano, EasySensors Shield & DF Robot Sensor test rig
The Seeeduino Nano devices I’m testing have a single on-board I2C socket which meant I didn’t need a Grove Shield for Arduino Nano which reduced the size and cost of the sensor node.
To configure the device in Azure IoT Central (similar process for Adafruit.IO, working on support for losant,and ubidots I copied the SNo: from the Arduino development tool logging window and appended p10 for PM 1 value, p25 for PM2.5 value and p100 for PM10 value to the unique serial number from the ATSHA204A chip. (N.B. pay attention to the case of the field names they are case sensitive)
When I moved the sensor indoors it appeared to take a while to warm up and after a while the metal body still felt cold. The sensor element is surrounded by quite a bit of protective packaging for outdoors use and I that would have a bit more thermal inertia the than the lightweight indoor enclosure.
It would be good to run the sensor alongside a calibrated temperature & humidity sensor to see how accurate and responsive it is.
The Seeeduino Nano devices I’m testing have a single on-board I2C socket which meant I didn’t need a Grove Shield for Arduino Nano which reduced the size and cost of the sensor node.
After looking at the demo application I stripped out the checksum code and threw the rest away. In my test harness I have extracted only the PM1.0/PM2.5/PM10.0 (concentration CF=1, Standard particulate) in μg/ m3 values from the sensor response payload.
/*
Copyright ® 2019 August devMobile Software, All Rights Reserved
THIS CODE AND INFORMATION IS PROVIDED "AS IS" WITHOUT WARRANTY OF ANY
KIND, EITHER EXPRESSED OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE
IMPLIED WARRANTIES OF MERCHANTABILITY AND/OR FITNESS FOR A PARTICULAR
PURPOSE.
You can do what you want with this code, acknowledgment would be nice.
http://www.devmobile.co.nz
*/
#include <stdlib.h>
#include <LoRa.h>
#include <sha204_library.h>
#include "Seeed_HM330X.h"
//#define DEBUG
//#define DEBUG_TELEMETRY
//#define DEBUG_LORA
const byte SensorPayloadLength = 28 ;
const byte SensorPayloadBufferSize = 29 ;
const byte SensorPayloadPM1_0Position = 4;
const byte SensorPayloadPM2_5Position = 6;
const byte SensorPayloadPM10_0Position = 8;
HM330X sensor;
byte SensorPayload[SensorPayloadBufferSize];
// LoRa field gateway configuration (these settings must match your field gateway)
const byte DeviceAddressMaximumLength = 15 ;
const char FieldGatewayAddress[] = {"LoRaIoT1"};
const float FieldGatewayFrequency = 915000000.0;
const byte FieldGatewaySyncWord = 0x12 ;
// Payload configuration
const int ChipSelectPin = 10;
const int ResetPin = 9;
const int InterruptPin = 2;
// LoRa radio payload configuration
const byte SensorIdValueSeperator = ' ' ;
const byte SensorReadingSeperator = ',' ;
const unsigned long SensorUploadDelay = 60000;
// ATSHA204 secure authentication, validation with crypto and hashing (currently only using for unique serial number)
const byte Atsha204Port = A3;
atsha204Class sha204(Atsha204Port);
const byte DeviceSerialNumberLength = 9 ;
byte deviceSerialNumber[DeviceSerialNumberLength] = {""};
const byte PayloadSizeMaximum = 64 ;
byte payload[PayloadSizeMaximum];
byte payloadLength = 0 ;
void setup()
{
Serial.begin(9600);
#ifdef DEBUG
while (!Serial);
#endif
Serial.println("Setup called");
Serial.print("Field gateway:");
Serial.print(FieldGatewayAddress ) ;
Serial.print(" Frequency:");
Serial.print( FieldGatewayFrequency,0 ) ;
Serial.print("MHz SyncWord:");
Serial.print( FieldGatewaySyncWord ) ;
Serial.println();
// Retrieve the serial number then display it nicely
if(sha204.getSerialNumber(deviceSerialNumber))
{
Serial.println("sha204.getSerialNumber failed");
while (true); // Drop into endless loop requiring restart
}
Serial.print("SNo:");
DisplayHex( deviceSerialNumber, DeviceSerialNumberLength);
Serial.println();
Serial.println("LoRa setup start");
// override the default chip select and reset pins
LoRa.setPins(ChipSelectPin, ResetPin, InterruptPin);
if (!LoRa.begin(FieldGatewayFrequency))
{
Serial.println("LoRa begin failed");
while (true); // Drop into endless loop requiring restart
}
// Need to do this so field gateway pays attention to messsages from this device
LoRa.enableCrc();
LoRa.setSyncWord(FieldGatewaySyncWord);
#ifdef DEBUG_LORA
LoRa.dumpRegisters(Serial);
#endif
Serial.println("LoRa Setup done.");
// Configure the Seeedstudio CO2, temperature & humidity sensor
Serial.println("HM3301 setup start");
if(sensor.init())
{
Serial.println("HM3301 init failed");
while (true); // Drop into endless loop requiring restart
}
delay(100);
Serial.println("HM3301 setup done");
PayloadHeader((byte *)FieldGatewayAddress,strlen(FieldGatewayAddress), deviceSerialNumber, DeviceSerialNumberLength);
Serial.println("Setup done");
Serial.println();
}
void loop()
{
unsigned long currentMilliseconds = millis();
byte sum=0;
short pm1_0 ;
short pm2_5 ;
short pm10_0 ;
Serial.println("Loop called");
if(sensor.read_sensor_value(SensorPayload,SensorPayloadBufferSize) == NO_ERROR)
{
// Calculate then validate the payload "checksum"
for(int i=0;i<SensorPayloadLength;i++)
{
sum+=SensorPayload[i];
}
if(sum!=SensorPayload[SensorPayloadLength])
{
Serial.println("Invalid checksum");
return;
}
PayloadReset();
pm1_0 = (u16)SensorPayload[SensorPayloadPM1_0Position]<<8|SensorPayload[SensorPayloadPM1_0Position+1];
Serial.print("PM1.5: ");
Serial.print(pm1_0);
Serial.println("ug/m3 ") ;
PayloadAdd( "P10", pm1_0, false);
pm2_5 = (u16)SensorPayload[SensorPayloadPM2_5Position]<<8|SensorPayload[SensorPayloadPM2_5Position+1];
Serial.print("PM2.5: ");
Serial.print(pm2_5);
Serial.println("ug/m3 ") ;
PayloadAdd( "P25", pm2_5, 1, false);
pm10_0 = (u16)SensorPayload[SensorPayloadPM10_0Position]<<8|SensorPayload[SensorPayloadPM10_0Position+1];
Serial.print("PM10.0: ");
Serial.print(pm10_0);
Serial.println("ug/m3 ");
PayloadAdd( "P100", pm10_0, 0, true) ;
#ifdef DEBUG_TELEMETRY
Serial.println();
Serial.print("RFM9X/SX127X Payload length:");
Serial.print(payloadLength);
Serial.println(" bytes");
#endif
LoRa.beginPacket();
LoRa.write(payload, payloadLength);
LoRa.endPacket();
}
Serial.println("Loop done");
Serial.println();
delay(SensorUploadDelay - (millis() - currentMilliseconds ));
}
void PayloadHeader( const byte *to, byte toAddressLength, const byte *from, byte fromAddressLength)
{
byte addressesLength = toAddressLength + fromAddressLength ;
payloadLength = 0 ;
// prepare the payload header with "To" Address length (top nibble) and "From" address length (bottom nibble)
payload[payloadLength] = (toAddressLength << 4) | fromAddressLength ;
payloadLength += 1;
// Copy the "To" address into payload
memcpy(&payload[payloadLength], to, toAddressLength);
payloadLength += toAddressLength ;
// Copy the "From" into payload
memcpy(&payload[payloadLength], from, fromAddressLength);
payloadLength += fromAddressLength ;
}
void PayloadAdd( const char *sensorId, float value, byte decimalPlaces, bool last)
{
byte sensorIdLength = strlen( sensorId ) ;
memcpy( &payload[payloadLength], sensorId, sensorIdLength) ;
payloadLength += sensorIdLength ;
payload[ payloadLength] = SensorIdValueSeperator;
payloadLength += 1 ;
payloadLength += strlen( dtostrf(value, -1, decimalPlaces, (char *)&payload[payloadLength]));
if (!last)
{
payload[ payloadLength] = SensorReadingSeperator;
payloadLength += 1 ;
}
#ifdef DEBUG_TELEMETRY
Serial.print("PayloadAdd float-payloadLength:");
Serial.print( payloadLength);
Serial.println( );
#endif
}
void PayloadAdd( char *sensorId, int value, bool last )
{
byte sensorIdLength = strlen(sensorId) ;
memcpy(&payload[payloadLength], sensorId, sensorIdLength) ;
payloadLength += sensorIdLength ;
payload[ payloadLength] = SensorIdValueSeperator;
payloadLength += 1 ;
payloadLength += strlen(itoa( value,(char *)&payload[payloadLength],10));
if (!last)
{
payload[ payloadLength] = SensorReadingSeperator;
payloadLength += 1 ;
}
#ifdef DEBUG_TELEMETRY
Serial.print("PayloadAdd int-payloadLength:" );
Serial.print(payloadLength);
Serial.println( );
#endif
}
void PayloadAdd( char *sensorId, unsigned int value, bool last )
{
byte sensorIdLength = strlen(sensorId) ;
memcpy(&payload[payloadLength], sensorId, sensorIdLength) ;
payloadLength += sensorIdLength ;
payload[ payloadLength] = SensorIdValueSeperator;
payloadLength += 1 ;
payloadLength += strlen(utoa( value,(char *)&payload[payloadLength],10));
if (!last)
{
payload[ payloadLength] = SensorReadingSeperator;
payloadLength += 1 ;
}
#ifdef DEBUG_TELEMETRY
Serial.print("PayloadAdd uint-payloadLength:");
Serial.print(payloadLength);
Serial.println( );
#endif
}
void PayloadReset()
{
byte fromAddressLength = payload[0] & 0xf ;
byte toAddressLength = payload[0] >> 4 ;
payloadLength = toAddressLength + fromAddressLength + 1;
}
void DisplayHex( byte *byteArray, byte length)
{
for (int i = 0; i < length ; i++)
{
// Add a leading zero
if ( byteArray[i] < 16)
{
Serial.print("0");
}
Serial.print(byteArray[i], HEX);
if ( i < (length-1)) // Don't put a - after last digit
{
Serial.print("-");
}
}
}
To configure the device in Azure IoT Central (similar process for Adafruit.IO, working on support for losant, and ubidots) I copied the SNo: from the Arduino development tool logging window and appended p10 for PM 1 value, p25 for PM2.5 value and p100 for PM10 value to the unique serial number from the ATSHA204A chip. (N.B. pay attention to the case of the field names they are case sensitive)
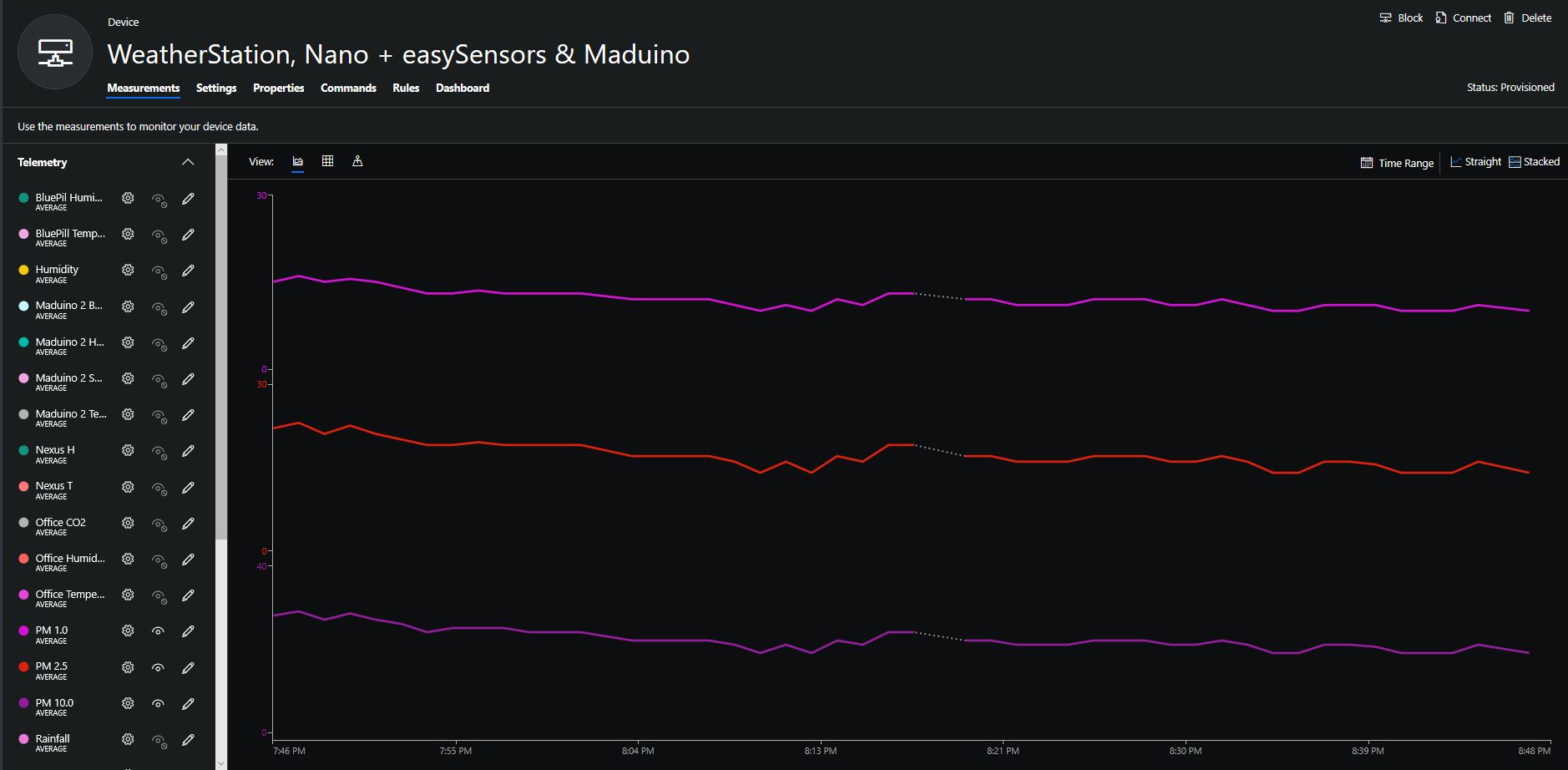
Azure IoT Central telemetry configuration
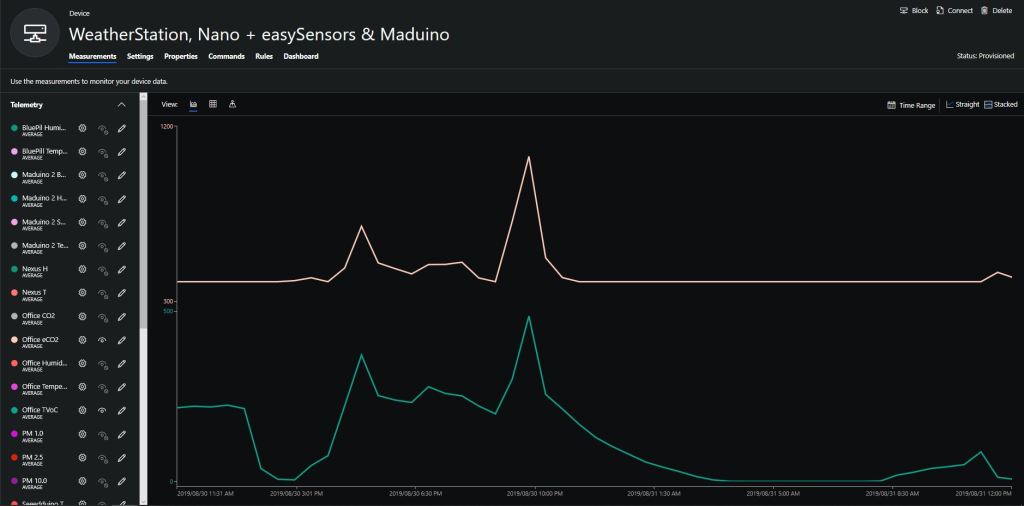
The rapidly settled into a narrow range of readings, but spiked when I took left it outside (winter in New Zealand) and the values spiked when food was being cooked in the kitchen which is next door to my office.
It would be good to run the sensor alongside a professional particulates monitor so the values could be compared and used to adjust the readings of the Grove sensor if necessary.
Hour of PM1, PM2.5 & PM10 readings in my office early eveningCO2 and particulates values while outside on my deck from 10:30pm to 11:30pm
Seeeduino Nano devices have a single on-board I2C socket which meant I didn’t need a Grove Shield for Arduino Nano which reduced the size and cost of the sensor node.
I downloaded the seeedstudio wiki example calibration code, compiled and uploaded it to one of my Seeeduino Nano devices. When activated for the first time a period of minimum 7 days is needed so that the sensor algorithm can find its initial parameter set. During this period the sensor has to be exposed to fresh air for at least 1 hour every day.
During the calibration process I put the device in my garage and left the big door open for at least an hour every day. Once the sensor was calibrated I bought it inside at put it on the bookcase in my office.
To configure the device in Azure IoT Central (similar process for Adafruit.IO, working on support for losant, and ubidots) I copied the SNo: from the Arduino development tool logging window and appended c for the CO2 parts per million (ppm), h for the humidity % and t for the temperature °C to the unique serial number from the ATSHA204A chip. (N.B. pay attention to the case of the field names they are case sensitive)
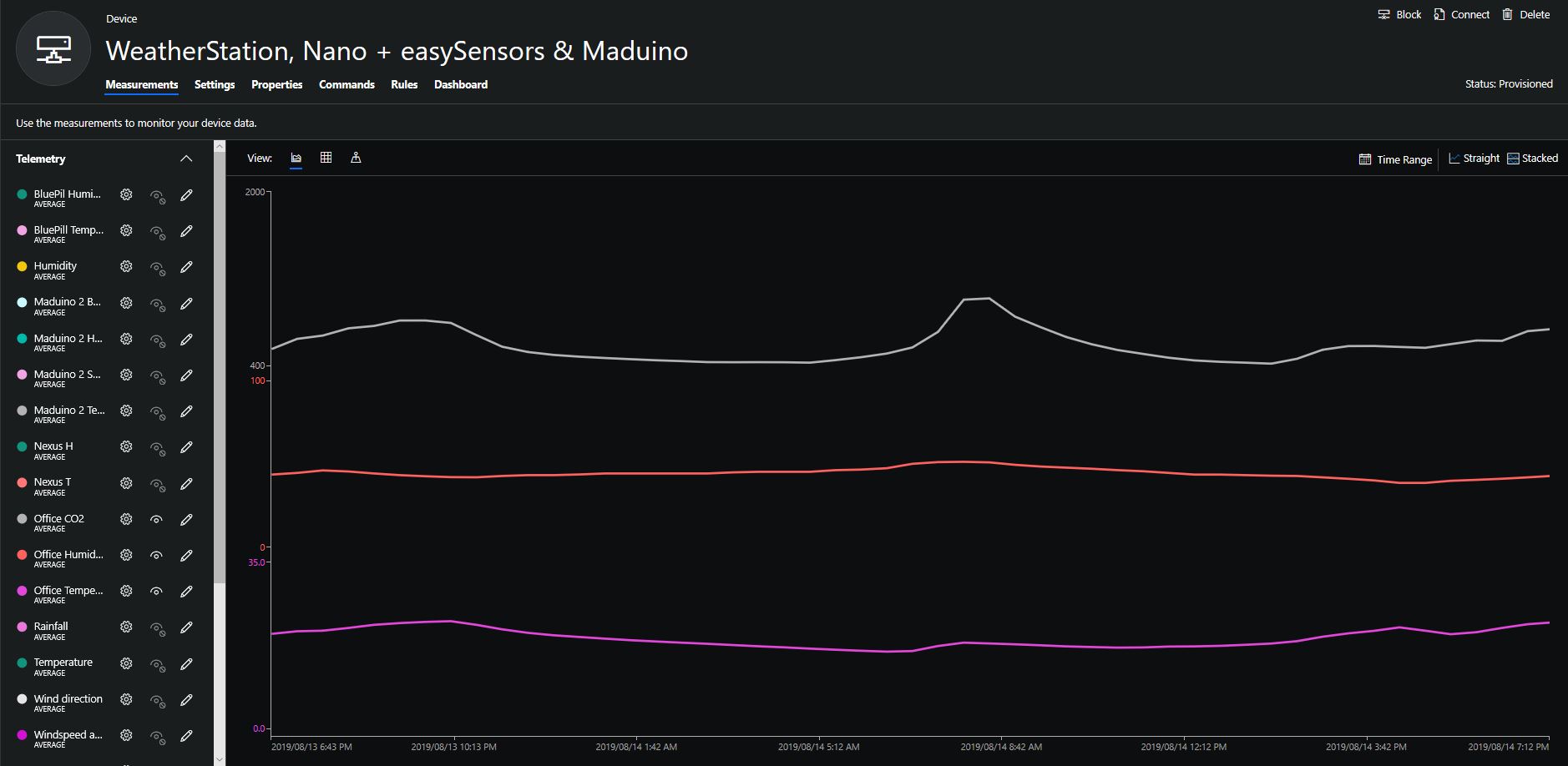
Azure IoT Central telemetry configuration
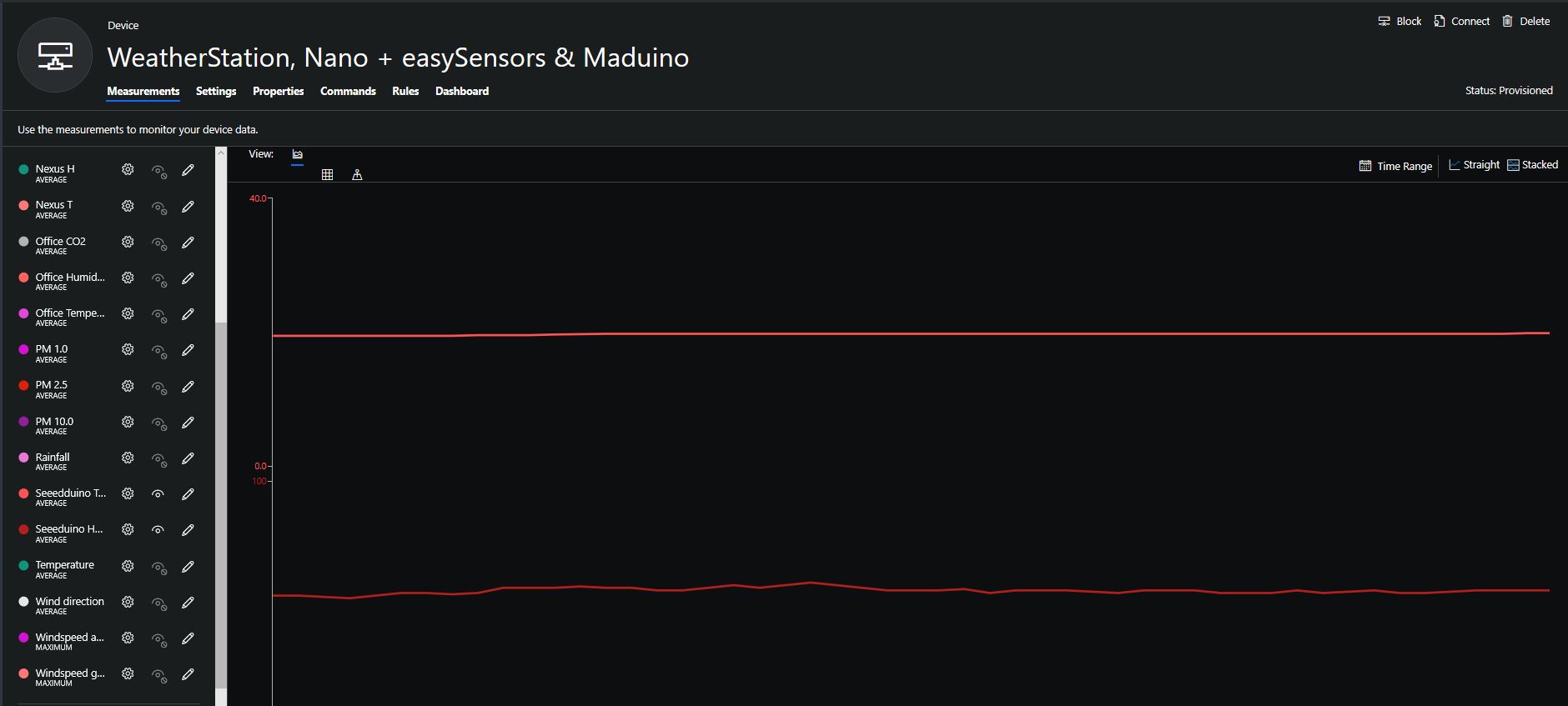
Overall the performance of the sensor is looking pretty positive, the CO2 levels fluctuate in a acceptable range (based on office occupancy), and the temperature + humidity readings track quite closely to the other two sensor nodes in my office. The only issue so far is my lack of USB-C cables to power the devices in the field
CO2, Humidity and Temperature in my office for a day
I increased delay between readings to 10sec and reduced the baud rate of the serial logging to 9600baud.
/*
This test code is write for Arduino AVR Series(UNO, Leonardo, Mega)
If you want to use with LinkIt ONE, please connect the module to D0/1 and modify:
// #include <SoftwareSerial.h>
// SoftwareSerial s_serial(2, 3); // TX, RX
#define sensor Serial1
*/
#include <SoftwareSerial.h>
SoftwareSerial s_serial(2, 3); // TX, RX
#define sensor s_serial
const unsigned char cmd_get_sensor[] =
{
0xff, 0x01, 0x86, 0x00, 0x00,
0x00, 0x00, 0x00, 0x79
};
unsigned char dataRevice[9];
int temperature;
int CO2PPM;
void setup()
{
sensor.begin(9600);
Serial.begin(9600);
Serial.println("get a 'g', begin to read from sensor!");
Serial.println("********************************************************");
Serial.println();
}
void loop()
{
if(dataRecieve())
{
Serial.print("Temperature: ");
Serial.print(temperature);
Serial.print(" CO2: ");
Serial.print(CO2PPM);
Serial.println("");
}
delay(10000);
}
bool dataRecieve(void)
{
byte data[9];
int i = 0;
//transmit command data
for(i=0; i<sizeof(cmd_get_sensor); i++)
{
sensor.write(cmd_get_sensor[i]);
}
delay(10);
//begin reveiceing data
if(sensor.available())
{
while(sensor.available())
{
for(int i=0;i<9; i++)
{
data[i] = sensor.read();
}
}
}
for(int j=0; j<9; j++)
{
Serial.print(data[j]);
Serial.print(" ");
}
Serial.println("");
if((i != 9) || (1 + (0xFF ^ (byte)(data[1] + data[2] + data[3] + data[4] + data[5] + data[6] + data[7]))) != data[8])
{
return false;
}
CO2PPM = (int)data[2] * 256 + (int)data[3];
temperature = (int)data[4] - 40;
return true;
}
The debug output wasn’t too promising there weren’t any C02 parts per million (ppm) values and the response payloads looked wrong. So I downloaded the MH-Z16 NDIR CO2 Sensor datasheet for some background. The datasheet didn’t mention any temperature data in the message payloads so I removed that code.
The response payload validation code was all on one line and hard to figure out what it was doing.
To make debugging easier I split the payload validation code into several steps so I could see what was failing.
/*
This test code is write for Arduino AVR Series(UNO, Leonardo, Mega)
If you want to use with LinkIt ONE, please connect the module to D0/1 and modify:
// #include <SoftwareSerial.h>
// SoftwareSerial s_serial(2, 3); // TX, RX
#define sensor Serial1
*/
#include <SoftwareSerial.h>
SoftwareSerial s_serial(2, 3); // TX, RX
#define sensor s_serial
const unsigned char cmd_get_sensor[] =
{
0xff, 0x01, 0x86, 0x00, 0x00,
0x00, 0x00, 0x00, 0x79
};
unsigned char dataRevice[9];
int CO2PPM;
void setup()
{
sensor.begin(9600);
Serial.begin(9600);
Serial.println("get a 'g', begin to read from sensor!");
Serial.println("********************************************************");
Serial.println();
}
void loop()
{
if(dataRecieve())
{
Serial.print(" CO2: ");
Serial.print(CO2PPM);
Serial.println("");
}
delay(10000);
}
bool dataRecieve(void)
{
byte data[9];
int i = 0;
//transmit command data
for(i=0; i<sizeof(cmd_get_sensor); i++)
{
sensor.write(cmd_get_sensor[i]);
}
delay(10);
//begin reveiceing data
if(sensor.available())
{
while(sensor.available())
{
for(int i=0;i<9; i++)
{
data[i] = sensor.read();
}
}
}
for(int j=0; j<9; j++)
{
Serial.print(data[j]);
Serial.print(" ");
}
Serial.println("");
// First calculate then validate the check sum as there is no point in proceeding if the packet is corrupted. (code inspired by datasheet algorithm)
byte checksum = 0 ;
for(int j=1; j<8; j++)
{
checksum += data[j];
}
checksum=0xff-checksum;
checksum+=1;
if (checksum != data[8])
{
Serial.println("Error checksum");
return false;
}
// Then check the start byte to make sure response is what we were expecting
if ( data[0] != 0xFF )
{
Serial.println("Error start byte");
return false;
}
// Then check the command byte to make sure response is what we were expecting
if ( data[1] != 0x86 )
{
Serial.println("Error command");
return false;
}
CO2PPM = (int)data[2] * 256 + (int)data[3];
return true;
}
From these modifications I could see the payload was messed up and based on the datasheet message descriptions it looked like it was offset by a byte or two.
I had a look at the code and the delay(10) after sending the sensor reading request message caught my attention. I have found that often delay(x) commands are used to “tweak” the code to get it to work.
These “tweaks” often break when code is run on a different device or sensor firmware is updated changing the timing of individual bytes, or request-response processes.
I removed the delay(10) replaced it with a serial.flush() and changed the code to display the payload bytes in hexadecimal.
/*
This test code is write for Arduino AVR Series(UNO, Leonardo, Mega)
If you want to use with LinkIt ONE, please connect the module to D0/1 and modify:
// #include <SoftwareSerial.h>
// SoftwareSerial s_serial(2, 3); // TX, RX
#define sensor Serial1
*/
#include <SoftwareSerial.h>
SoftwareSerial s_serial(2, 3); // TX, RX
#define sensor s_serial
const unsigned char cmd_get_sensor[] =
{
0xff, 0x01, 0x86, 0x00, 0x00,
0x00, 0x00, 0x00, 0x79
};
unsigned char dataRevice[9];
int CO2PPM;
void setup()
{
sensor.begin(9600);
Serial.begin(9600);
Serial.println("get a 'g', begin to read from sensor!");
Serial.println("********************************************************");
Serial.println();
}
void loop()
{
if(dataRecieve())
{
Serial.print(" CO2: ");
Serial.print(CO2PPM);
Serial.println("");
}
delay(10000);
}
bool dataRecieve(void)
{
byte data[9];
int i = 0;
//transmit command data
for(i=0; i<sizeof(cmd_get_sensor); i++)
{
sensor.write(cmd_get_sensor[i]);
}
Serial.flush();
//begin reveiceing data
if(sensor.available())
{
while(sensor.available())
{
for(int i=0;i<9; i++)
{
data[i] = sensor.read();
}
}
}
for(int j=0; j<9; j++)
{
Serial.print(data[j],HEX);
Serial.print(" ");
}
Serial.println("");
// First calculate then validate the check sum as there is no point in proceeding if the packet is corrupted. (code inspired by datasheet algorithm)
byte checksum = 0 ;
for(int j=1; j<8; j++)
{
checksum += data[j];
}
checksum=0xff-checksum;
checksum+=1;
if (checksum != data[8])
{
Serial.println("Error checksum");
return false;
}
// Then check the start byte to make sure response is what we were expecting
if ( data[0] != 0xFF )
{
Serial.println("Error start byte");
return false;
}
// Then check the command byte to make sure response is what we were expecting
if ( data[1] != 0x86 )
{
Serial.println("Error command");
return false;
}
CO2PPM = (int)data[2] * 256 + (int)data[3];
return true;
}
The initial values from the sensor were a bit high, but after leaving the device running for 3 minutes (Preheat time in the documentation) they settled down into a reasonable range