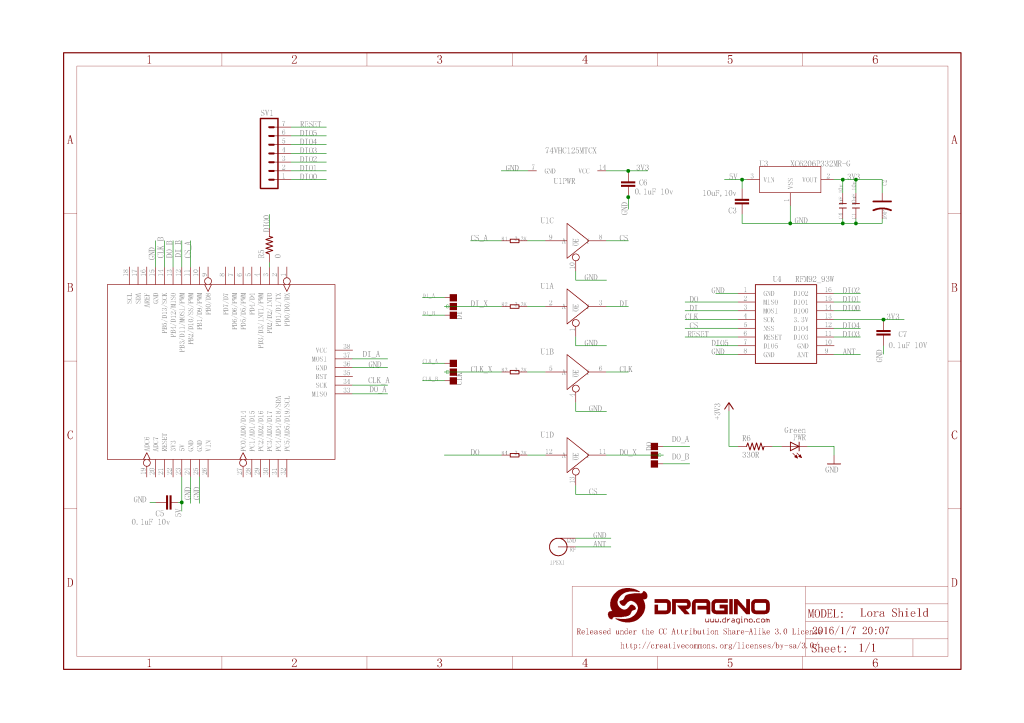
Now that I could reliably dump all the Dragino shield registers I wanted to be able to configure the Semtech 127X device and reset it back to factory settings. A factory reset is done by strobing the SX127X reset pin.

SX127X Reset process
To support this I added a constructor with an additional parameter for the reset General Purpose Input Output(GPIO) pin number to the SX127XDevice class. The original constructor was retained as the SX127X reset pin is not connected on the SparkFun LoRa Gateway-1-Channel (ESP32) and a limited number of other devices.
namespace devMobile.IoT.SX127x.RegisterReadAndWrite
{
using System;
using System.Diagnostics;
using System.Threading;
using System.Device.Gpio;
using System.Device.Spi;
#if ESP32_WROOM_32_LORA_1_CHANNEL
using nanoFramework.Hardware.Esp32;
#endif
public sealed class SX127XDevice
{
private const byte RegisterAddressMinimum = 0X0;
private const byte RegisterAddressMaximum = 0x42;
private const byte RegisterAddressReadMask = 0X7f;
private const byte RegisterAddressWriteMask = 0x80;
private readonly SpiDevice SX127XTransceiver;
public SX127XDevice(int busId, int chipSelectLine, int resetPin)
{
var settings = new SpiConnectionSettings(busId, chipSelectLine)
{
ClockFrequency = 1000000,
Mode = SpiMode.Mode0,// From SemTech docs pg 80 CPOL=0, CPHA=0
SharingMode = SpiSharingMode.Shared
};
SX127XTransceiver = new SpiDevice(settings);
// Factory reset pin configuration
GpioController gpioController = new GpioController();
gpioController.OpenPin(resetPin, PinMode.Output);
gpioController.Write(resetPin, PinValue.Low);
Thread.Sleep(20);
gpioController.Write(resetPin, PinValue.High);
Thread.Sleep(20);
}
public SX127XDevice(int busId, int chipSelectLine)
{
var settings = new SpiConnectionSettings(busId, chipSelectLine)
{
ClockFrequency = 1000000,
Mode = SpiMode.Mode0,// From SemTech docs pg 80 CPOL=0, CPHA=0
SharingMode = SpiSharingMode.Shared,
};
SX127XTransceiver = new SpiDevice(settings);
}
public Byte ReadByte(byte registerAddress)
{
byte[] writeBuffer = new byte[] { registerAddress &= RegisterAddressReadMask, 0x0 };
byte[] readBuffer = new byte[writeBuffer.Length];
SX127XTransceiver.TransferFullDuplex(writeBuffer, readBuffer);
return readBuffer[1];
}
public ushort ReadWord(byte address)
{
byte[] writeBuffer = new byte[] { address &= RegisterAddressReadMask, 0x0, 0x0 };
byte[] readBuffer = new byte[writeBuffer.Length];
SX127XTransceiver.TransferFullDuplex(writeBuffer, readBuffer);
return (ushort)(readBuffer[2] + (readBuffer[1] << 8));
}
public ushort ReadWordMsbLsb(byte address)
{
byte[] writeBuffer = new byte[] { address &= RegisterAddressReadMask, 0x0, 0x0 };
byte[] readBuffer = new byte[writeBuffer.Length];
SX127XTransceiver.TransferFullDuplex(writeBuffer, readBuffer);
return (ushort)((readBuffer[1] << 8) + readBuffer[2]);
}
public byte[] ReadBytes(byte address, byte length)
{
byte[] writeBuffer = new byte[length + 1];
byte[] readBuffer = new byte[writeBuffer.Length];
byte[] replyBuffer = new byte[length];
writeBuffer[0] = address &= RegisterAddressReadMask;
SX127XTransceiver.TransferFullDuplex(writeBuffer, readBuffer);
Array.Copy(readBuffer, 1, replyBuffer, 0, length);
return replyBuffer;
}
public void WriteByte(byte address, byte value)
{
byte[] writeBuffer = new byte[] { address |= RegisterAddressWriteMask, value };
byte[] readBuffer = new byte[writeBuffer.Length];
SX127XTransceiver.TransferFullDuplex(writeBuffer, readBuffer);
}
public void WriteWord(byte address, ushort value)
{
byte[] valueBytes = BitConverter.GetBytes(value);
byte[] writeBuffer = new byte[] { address |= RegisterAddressWriteMask, valueBytes[0], valueBytes[1] };
byte[] readBuffer = new byte[writeBuffer.Length];
SX127XTransceiver.TransferFullDuplex(writeBuffer, readBuffer);
}
public void WriteWordMsbLsb(byte address, ushort value)
{
byte[] valueBytes = BitConverter.GetBytes(value);
byte[] writeBuffer = new byte[] { address |= RegisterAddressWriteMask, valueBytes[1], valueBytes[0] };
byte[] readBuffer = new byte[writeBuffer.Length];
SX127XTransceiver.TransferFullDuplex(writeBuffer, readBuffer);
}
public void WriteBytes(byte address, byte[] bytes)
{
byte[] writeBuffer = new byte[1 + bytes.Length];
byte[] readBuffer = new byte[writeBuffer.Length];
Array.Copy(bytes, 0, writeBuffer, 1, bytes.Length);
writeBuffer[0] = address |= RegisterAddressWriteMask;
SX127XTransceiver.TransferFullDuplex(writeBuffer, readBuffer);
}
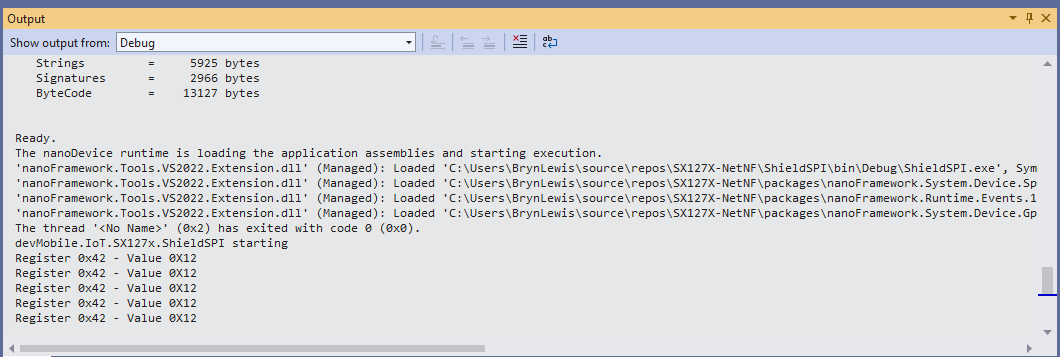
public void RegisterDump()
{
Debug.WriteLine("Register dump");
for (byte registerIndex = RegisterAddressMinimum; registerIndex <= RegisterAddressMaximum; registerIndex++)
{
byte registerValue = this.ReadByte(registerIndex);
Debug.WriteLine($"Register 0x{registerIndex:x2} - Value 0X{registerValue:x2}");
}
Debug.WriteLine("");
}
}
public class Program
{
#if ESP32_WROOM_32_LORA_1_CHANNEL
private const int SpiBusId = 1;
#endif
#if NETDUINO3_WIFI
private const int SpiBusId = 2;
#endif
#if ST_STM32F769I_DISCOVERY
private const int SpiBusId = 2;
#endif
public static void Main()
{
byte[] frequencyBytes;
#if ESP32_WROOM_32_LORA_1_CHANNEL // No reset line for this device as it isn't connected on SX127X
int chipSelectLine = Gpio.IO16;
#endif
#if NETDUINO3_WIFI
// Arduino D10->PB10
int chipSelectLine = PinNumber('B', 10);
// Arduino D9->PE5
int resetPinNumber = PinNumber('E', 5);
#endif
#if ST_STM32F769I_DISCOVERY
// Arduino D10->PA11
int chipSelectLine = PinNumber('A', 11);
// Arduino D9->PH6
int resetPinNumber = PinNumber('H', 6);
#endif
Debug.WriteLine("devMobile.IoT.SX127x.RegisterReadAndWrite starting");
try
{
#if ESP32_WROOM_32_LORA_1_CHANNEL
Configuration.SetPinFunction(Gpio.IO12, DeviceFunction.SPI1_MISO);
Configuration.SetPinFunction(Gpio.IO13, DeviceFunction.SPI1_MOSI);
Configuration.SetPinFunction(Gpio.IO14, DeviceFunction.SPI1_CLOCK);
SX127XDevice sx127XDevice = new SX127XDevice(SpiBusId, chipSelectLine);
#endif
#if NETDUINO3_WIFI || ST_STM32F769I_DISCOVERY
SX127XDevice sx127XDevice = new SX127XDevice(SpiBusId, chipSelectLine, resetPinNumber);
#endif
Thread.Sleep(500);
sx127XDevice.RegisterDump();
while (true)
{
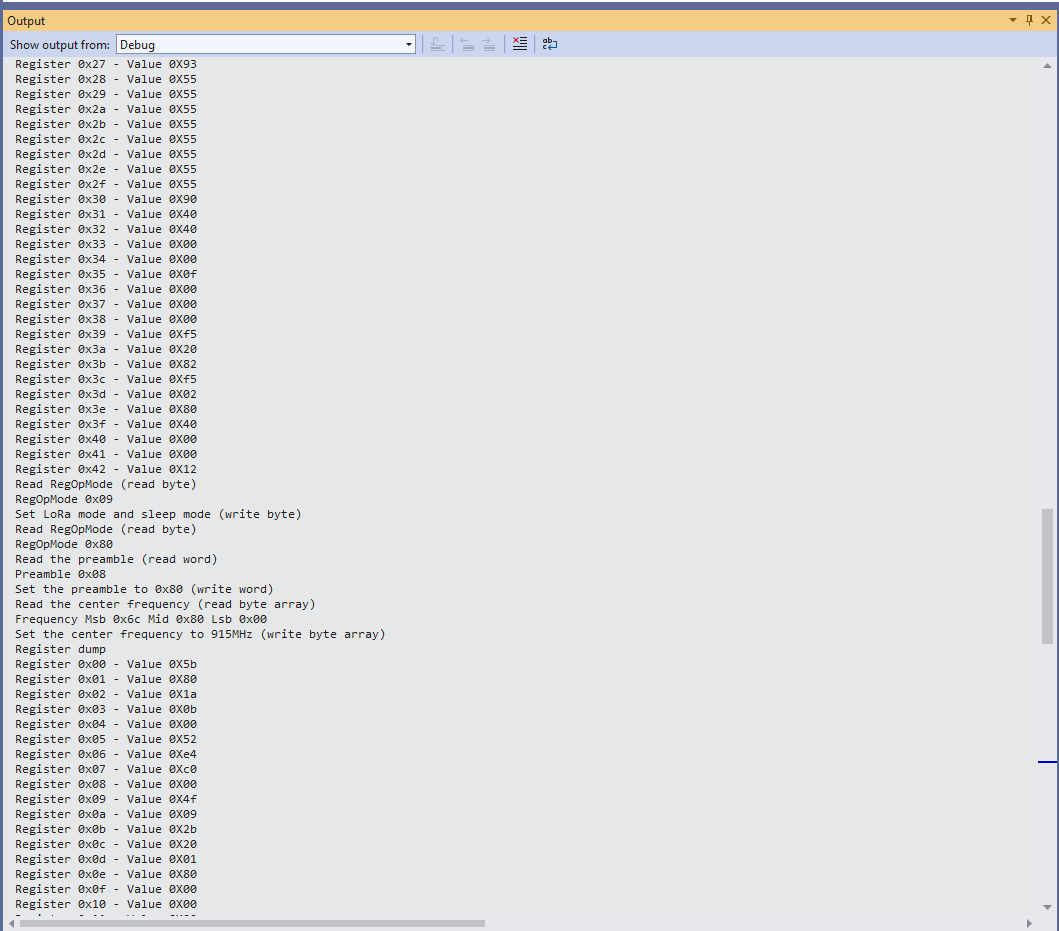
Debug.WriteLine("Read RegOpMode (read byte)");
Byte regOpMode1 = sx127XDevice.ReadByte(0x1);
Debug.WriteLine($"RegOpMode 0x{regOpMode1:x2}");
Debug.WriteLine("Set LoRa mode and sleep mode (write byte)");
sx127XDevice.WriteByte(0x01, 0b10000000);
Debug.WriteLine("Read RegOpMode (read byte)");
Byte regOpMode2 = sx127XDevice.ReadByte(0x1);
Debug.WriteLine($"RegOpMode 0x{regOpMode2:x2}");
Debug.WriteLine("Read the preamble (read word)");
ushort preamble = sx127XDevice.ReadWord(0x20);
Debug.WriteLine($"Preamble 0x{preamble:x2}");
Console.WriteLine("Read the preamble (read word)"); // Should be 0x08
preamble = sx127XDevice.ReadWordMsbLsb(0x20);
Debug.WriteLine($"Preamble 0x{preamble:x2}");
Debug.WriteLine("Read the centre frequency (read byte array)");
frequencyBytes = sx127XDevice.ReadBytes(0x06, 3);
Debug.WriteLine($"Frequency Msb 0x{frequencyBytes[0]:x2} Mid 0x{frequencyBytes[1]:x2} Lsb 0x{frequencyBytes[2]:x2}");
Debug.WriteLine("Set the centre frequency to 915MHz (write byte array)");
byte[] frequencyWriteBytes = { 0xE4, 0xC0, 0x00 };
sx127XDevice.WriteBytes(0x06, frequencyWriteBytes);
Debug.WriteLine("Read the centre frequency (read byte array)");
frequencyBytes = sx127XDevice.ReadBytes(0x06, 3);
Debug.WriteLine($"Frequency Msb 0x{frequencyBytes[0]:x2} Mid 0x{frequencyBytes[1]:x2} Lsb 0x{frequencyBytes[2]:x2}");
sx127XDevice.RegisterDump();
Thread.Sleep(30000);
}
}
catch (Exception ex)
{
Debug.WriteLine(ex.Message);
}
}
#if NETDUINO3_WIFI || ST_STM32F769I_DISCOVERY
static int PinNumber(char port, byte pin)
{
if (port < 'A' || port > 'J')
throw new ArgumentException();
return ((port - 'A') * 16) + pin;
}
#endif
}
}
The PinNumber helper is more user friendly that the raw numbers and is “inspired” by sample .NET nanoFramework General Purpose Input Output(GPIO) sample code.
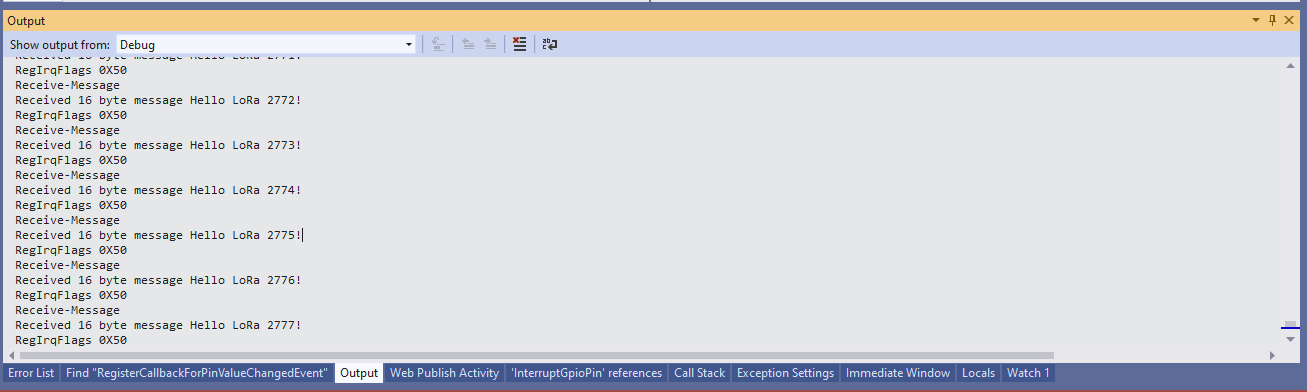
Each method was tested by read/writing suitable register(s) in the device configuration (Needed to set it into LoRa mode first).
The next step is to extract the Serial Peripheral Interface(SPI) register access functionality into a module and configure the bare minimum of settings required to get the SX127X to receive and transmit messages.