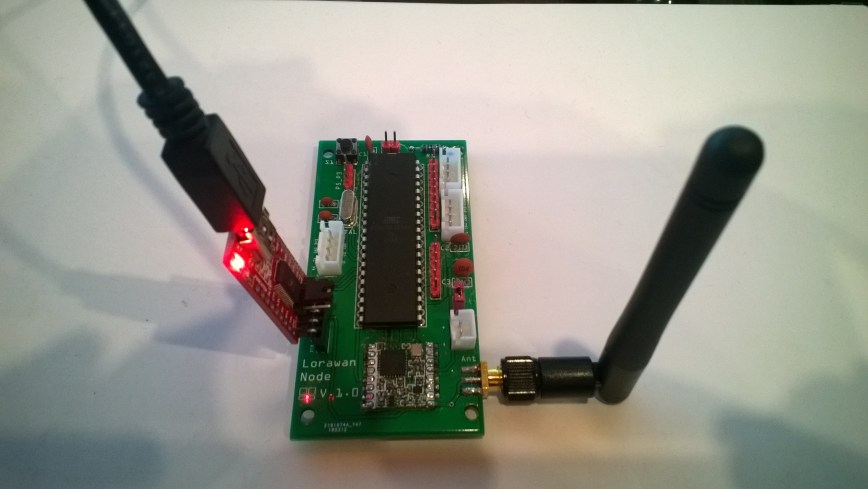
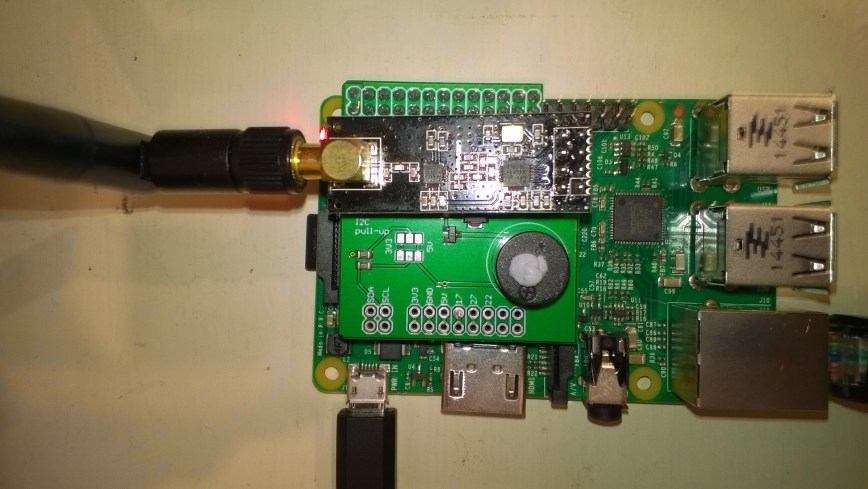
This is a demo Dragino LoRa Mini Dev featuring LoRa® technology client (based on one of the examples from Arduino-LoRa) that uploads telemetry data to my AdaFruit.IO and Azure IoT Hubs Windows 10 IoT Core on Raspberry PI proof of concept (PoC) field gateways.
Bill of materials (Prices Sep 2018)
- Draguino LoRa MiniDev USD23
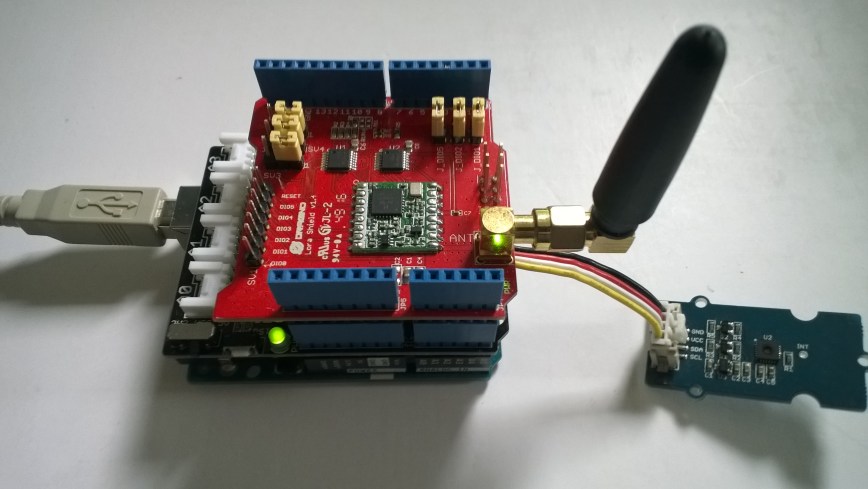
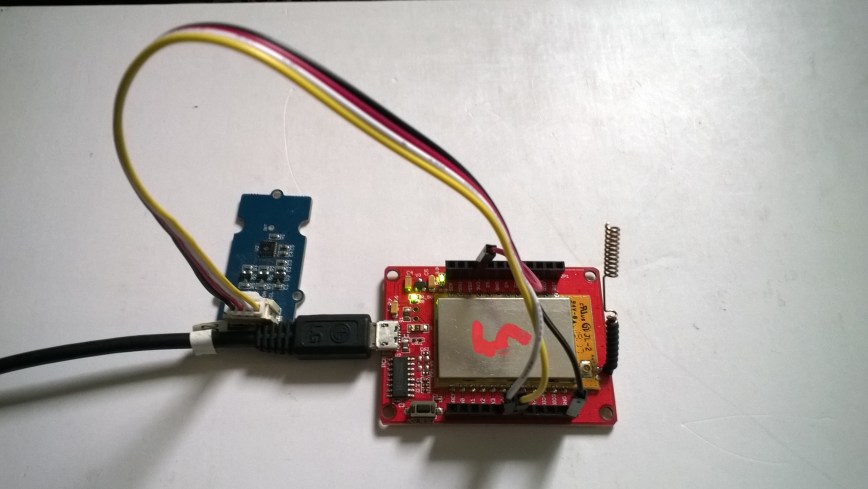
- Seeedstudio Temperature&Humidity Sensor USD11.50 NZD20
- 4 pin Male Jumper to Grove 4 pin Conversion Cable USD2.90
The code is pretty basic, it shows how to pack the payload and set the necessary RFM9X/SX127X LoRa module configuration, has no power conservation, advanced wireless configuration etc.
The Grove 4 pin Male Jumper to Grove 4 pin Conversion Cable was a quick & convenient way to get the I2C Grove temperature and humidity sensor connected up.
/*
Adapted from LoRa Duplex communication with Sync Word
Sends temperature & humidity data from Seeedstudio
https://www.seeedstudio.com/Grove-Temperature-Humidity-Sensor-High-Accuracy-Min-p-1921.html
To my Windows 10 IoT Core RFM 9X library
https://blog.devmobile.co.nz/2018/09/03/rfm9x-iotcore-payload-addressing/
*/
#include
#include
#include
const int csPin = 10; // LoRa radio chip select
const int resetPin = 9; // LoRa radio reset
const int irqPin = 2; // change for your board; must be a hardware interrupt pin
// Field gateway configuration
const byte FieldGatewayAddress[] = "LoRaIoT1";
const float FieldGatewayFrequency = 915000000.0;
//const float FieldGatewayFrequency = 433000000.0;
const byte FieldGatewaySyncWord = 0x12 ;
// Payload configuration
const int PayloadSizeMaximum = 64 ;
char payload[PayloadSizeMaximum] = "";
const byte SensorReadingSeperator = ',' ;
// Manual serial number configuration
char DeviceId[] = {"LoRaMiniDev5"};
const int LoopSleepDelaySeconds = 10 ;
void setup() {
Serial.begin(9600);
while (!Serial);
Serial.print("LoRa Setup-");
Serial.println( DeviceId ) ;
// override the default CS, reset, and IRQ pins (optional)
LoRa.setPins(csPin, resetPin, irqPin);// set CS, reset, IRQ pin
if (!LoRa.begin(FieldGatewayFrequency))
{
Serial.println("LoRa init failed. Check your connections.");
while (true);
}
// Need to do this so field gateways pays attention to messsages from this device
LoRa.enableCrc();
LoRa.setSyncWord(FieldGatewaySyncWord);
//LoRa.dumpRegisters(Serial);
Serial.println("LoRa Setup done.");
// Configure the Seeedstudio TH02 temperature & humidity sensor
Serial.println("TH02 setup");
TH02.begin();
delay(100);
Serial.println("TH02 Setup done");
Serial.println("Setup done");
}
void loop()
{
int payloadLength = 0 ;
float temperature ;
float humidity ;
Serial.println("Loop called");
memset(payload, 0, sizeof(payload));
// prepare the payload header with "To" Address length (top nibble) and "From" address length (bottom nibble)
payload[0] = (strlen(FieldGatewayAddress)<<4) | strlen( DeviceId ) ;
payloadLength += 1;
// Copy the "To" address into payload
memcpy(&payload[payloadLength], FieldGatewayAddress, strlen(FieldGatewayAddress));
payloadLength += strlen(FieldGatewayAddress) ;
// Copy the "From" into payload
memcpy(&payload[payloadLength], DeviceId, strlen(DeviceId));
payloadLength += strlen(DeviceId) ;
// Read the temperature and humidity values then display nicely
temperature = TH02.ReadTemperature();
humidity = TH02.ReadHumidity();
Serial.print("T:");
Serial.print( temperature, 1 ) ;
Serial.print( "C" ) ;
Serial.print(" H:");
Serial.print( humidity, 0 ) ;
Serial.println( "%" ) ;
// Copy the temperature into the payload
payload[ payloadLength] = 't';
payloadLength += 1 ;
payload[ payloadLength] = ' ';
payloadLength += 1 ;
payloadLength += strlen( dtostrf(temperature, -1, 1, &payload[payloadLength]));
payload[ payloadLength] = SensorReadingSeperator;
payloadLength += sizeof(SensorReadingSeperator) ;
// Copy the humidity into the payload
payload[ payloadLength] = 'h';
payloadLength += 1 ;
payload[ payloadLength] = ' ';
payloadLength += 1 ;
payloadLength += strlen( dtostrf(humidity, -1, 0, &payload[payloadLength]));
// display info about payload then send it (No ACK) with LoRa unlike nRF24L01
Serial.print( "RFM9X/SX127X Payload length:");
Serial.print( payloadLength );
Serial.println( " bytes" );
LoRa.beginPacket();
LoRa.write( payload, payloadLength );
LoRa.endPacket();
Serial.println("Loop done");
delay(LoopSleepDelaySeconds * 1000l);
}
In the debug output window the messages from the device looked like this
09:53:05-RX From LoRaMiniDev5 PacketSnr 9.3 Packet RSSI -65dBm RSSI -109dBm = 11 byte message "t 16.8,h 98" Sensor LoRaMiniDev5t Value 16.8 Sensor LoRaMiniDev5h Value 98 AzureIoTHubClient SendEventAsync start AzureIoTHubClient SendEventAsync finish The thread 0xba0 has exited with code 0 (0x0). The thread 0xb24 has exited with code 0 (0x0). 09:53:15-RX From LoRaMiniDev5 PacketSnr 9.3 Packet RSSI -65dBm RSSI -108dBm = 11 byte message "t 16.7,h 98" Sensor LoRaMiniDev5t Value 16.7 Sensor LoRaMiniDev5h Value 98 AzureIoTHubClient SendEventAsync start AzureIoTHubClient SendEventAsync finish The thread 0x76c has exited with code 0 (0x0). The thread 0x91c has exited with code 0 (0x0).
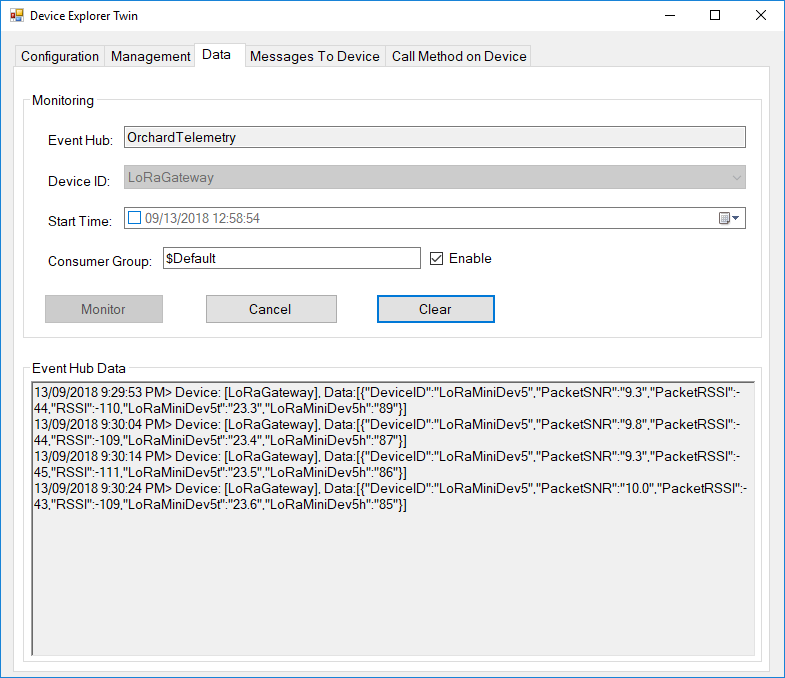
Then in my Azure IoT Hub monitoring software
The dragino LoRa Mini Dev with an external antenna connector would be a good indoor data acquisition node for student project when powered by a 2nd hand cellphone charger.