Nasty OTAA connect
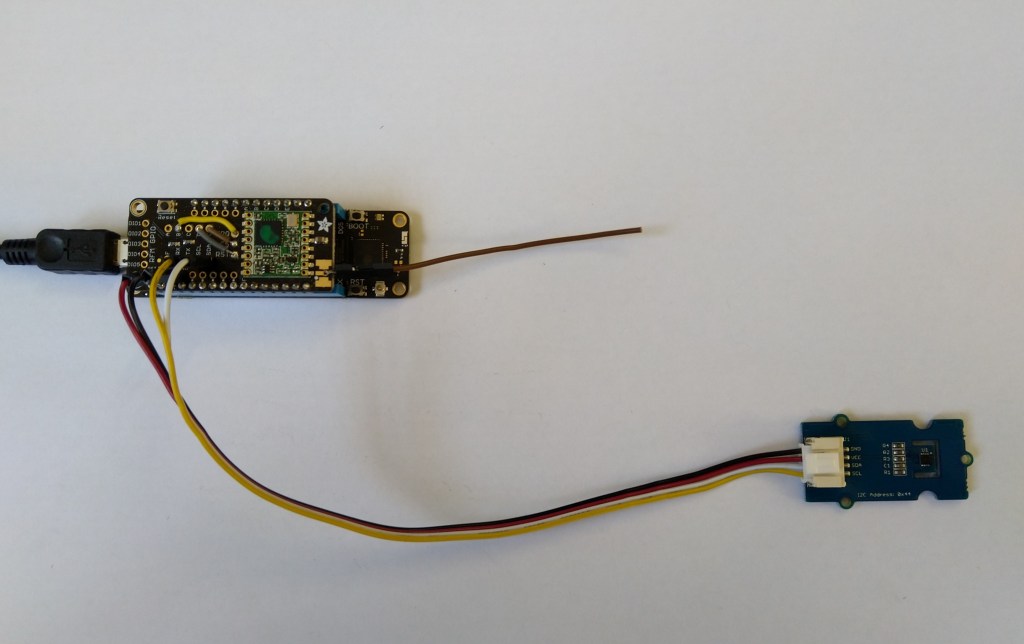
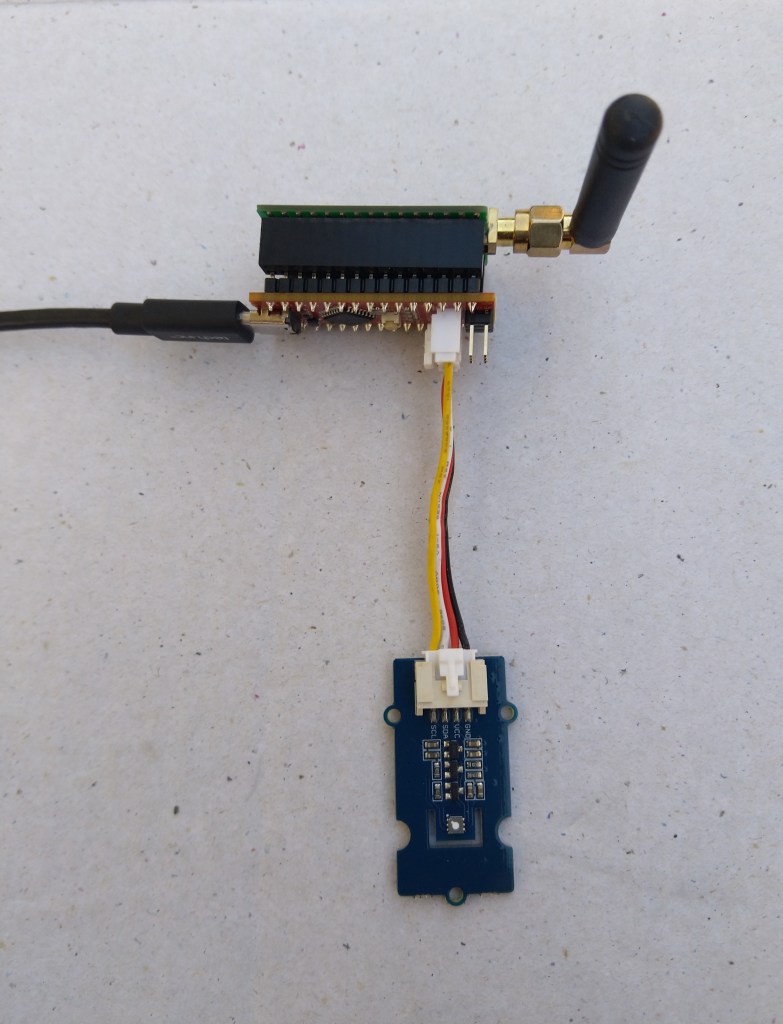
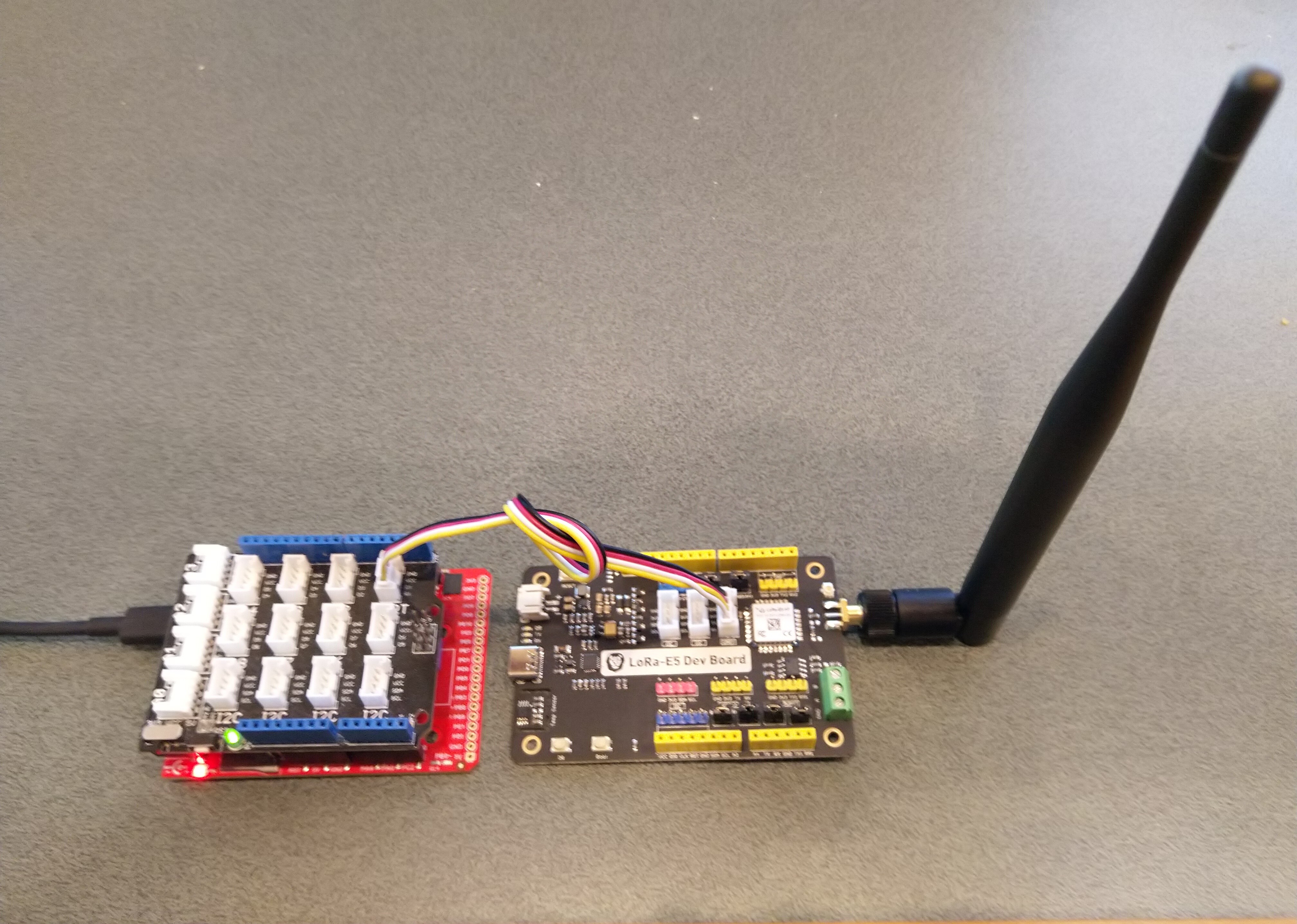
After getting basic connectivity for my Seeedstudio LoRa-E5 Development Kit and Fezduino test rig working I wanted to see if I could get the device connected to The Things Industries(TTI) via the RAK7258 WisGate Edge Lite on the shelf in my office.
My Over the Air Activation (OTAA) implementation is very “nasty” as it is assumed that there are no timeouts or failures and it only sends one BCD message “48656c6c6f204c6f526157414e” which is “hello LoRaWAN”. The code just sequentially steps through the necessary commands (with a suitable delay after each is sent) to join the TTI network.
public class Program
{
#if TINYCLR_V2_FEZDUINO
private static string SerialPortId = SC20100.UartPort.Uart5;
#endif
private const string AppKey = "................................";
//txByteCount = serialDevice.Write(UTF8Encoding.UTF8.GetBytes($"AT+ID=AppEui,{AppEui}\r\n"));
//private const string AppEui = "................";
//txByteCount = serialDevice.Write(UTF8Encoding.UTF8.GetBytes($"AT+ID=AppEui,\"{AppEui}\"\r\n"));
private const string AppEui = ".. .. .. .. .. .. .. ..";
private const byte messagePort = 1;
//private const string payload = "48656c6c6f204c6f526157414e"; // Hello LoRaWAN
private const string payload = "01020304"; // AQIDBA==
//private const string payload = "04030201"; // BAMCAQ==
public static void Main()
{
UartController serialDevice;
int txByteCount;
int rxByteCount;
Debug.WriteLine("devMobile.IoT.SeeedE5.NetworkJoinOTAA starting");
try
{
serialDevice = UartController.FromName(SerialPortId);
serialDevice.SetActiveSettings(new UartSetting()
{
BaudRate = 9600,
Parity = UartParity.None,
StopBits = UartStopBitCount.One,
Handshaking = UartHandshake.None,
DataBits = 8
});
serialDevice.Enable();
// Set the Region to AS923
txByteCount = serialDevice.Write(UTF8Encoding.UTF8.GetBytes("AT+DR=AS923\r\n"));
Debug.WriteLine($"TX: DR {txByteCount} bytes");
Thread.Sleep(500);
// Read the response
rxByteCount = serialDevice.BytesToRead;
if (rxByteCount > 0)
{
byte[] rxBuffer = new byte[rxByteCount];
serialDevice.Read(rxBuffer);
Debug.WriteLine($"RX :{UTF8Encoding.UTF8.GetString(rxBuffer)}");
}
// Set the Join mode
txByteCount = serialDevice.Write(UTF8Encoding.UTF8.GetBytes("AT+MODE=LWOTAA\r\n"));
Debug.WriteLine($"TX: MODE {txByteCount} bytes");
Thread.Sleep(500);
// Read the response
rxByteCount = serialDevice.BytesToRead;
if (rxByteCount > 0)
{
byte[] rxBuffer = new byte[rxByteCount];
serialDevice.Read(rxBuffer);
Debug.WriteLine($"RX :{UTF8Encoding.UTF8.GetString(rxBuffer)}");
}
// Set the appEUI
txByteCount = serialDevice.Write(UTF8Encoding.UTF8.GetBytes($"AT+ID=AppEui,\"{AppEui}\"\r\n"));
Debug.WriteLine($"TX: ID=AppEui {txByteCount} bytes");
Thread.Sleep(500);
// Read the response
rxByteCount = serialDevice.BytesToRead;
if (rxByteCount > 0)
{
byte[] rxBuffer = new byte[rxByteCount];
serialDevice.Read(rxBuffer);
Debug.WriteLine($"RX :{UTF8Encoding.UTF8.GetString(rxBuffer)}");
}
// Set the appKey
txByteCount = serialDevice.Write(UTF8Encoding.UTF8.GetBytes($"AT+KEY=APPKEY,{AppKey}\r\n"));
Debug.WriteLine($"TX: KEY=APPKEY {txByteCount} bytes");
Thread.Sleep(500);
// Read the response
rxByteCount = serialDevice.BytesToRead;
if (rxByteCount > 0)
{
byte[] rxBuffer = new byte[rxByteCount];
serialDevice.Read(rxBuffer);
Debug.WriteLine($"RX :{UTF8Encoding.UTF8.GetString(rxBuffer)}");
}
// Set the PORT
txByteCount = serialDevice.Write(UTF8Encoding.UTF8.GetBytes($"AT+PORT={messagePort}\r\n"));
Debug.WriteLine($"TX: PORT {txByteCount} bytes");
Thread.Sleep(500);
// Read the response
rxByteCount = serialDevice.BytesToRead;
if (rxByteCount > 0)
{
byte[] rxBuffer = new byte[rxByteCount];
serialDevice.Read(rxBuffer);
Debug.WriteLine($"RX :{UTF8Encoding.UTF8.GetString(rxBuffer)}");
}
// Join the network
txByteCount = serialDevice.Write(UTF8Encoding.UTF8.GetBytes("AT+JOIN\r\n"));
Debug.WriteLine($"TX: JOIN {txByteCount} bytes");
Thread.Sleep(10000);
// Read the response
rxByteCount = serialDevice.BytesToRead;
if (rxByteCount > 0)
{
byte[] rxBuffer = new byte[rxByteCount];
serialDevice.Read(rxBuffer);
Debug.WriteLine($"RX :{UTF8Encoding.UTF8.GetString(rxBuffer)}");
}
while (true)
{
// Unconfirmed message
txByteCount = serialDevice.Write(UTF8Encoding.UTF8.GetBytes($"AT+MSGHEX=\"{payload}\"\r\n"));
Debug.WriteLine($"TX: MSGHEX {txByteCount} bytes");
// Confirmed message
//txByteCount = serialDevice.Write(UTF8Encoding.UTF8.GetBytes($"AT+CMSGHEX=\"{payload}\"\r\n"));
//Debug.WriteLine($"TX: CMSGHEX {txByteCount} bytes");
Thread.Sleep(10000);
// Read the response
rxByteCount = serialDevice.BytesToRead;
if (rxByteCount > 0)
{
byte[] rxBuffer = new byte[rxByteCount];
serialDevice.Read(rxBuffer);
Debug.WriteLine($"RX :{UTF8Encoding.UTF8.GetString(rxBuffer)}");
}
Thread.Sleep(30000);
}
}
catch (Exception ex)
{
Debug.WriteLine(ex.Message);
}
}
}
The code is not suitable for production but it confirmed my software and hardware configuration worked.
The thread '<No Name>' (0x2) has exited with code 0 (0x0).
devMobile.IoT.SeeedE5.NetworkJoinOTAA starting
TX: DR 13 bytes
RX :+DR: AS923
TX: MODE 16 bytes
RX :+MODE: LWOTAA
TX: ID=AppEui 40 bytes
RX :+ID: AppEui, ..:..:.:.:.:.:.:.
TX: KEY=APPKEY 48 bytes
RX :+KEY: APPKEY ................................
TX: PORT 11 bytes
RX :+PORT: 1
TX: JOIN 9 bytes
RX :+JOIN: Start
+JOIN: NORMAL
+JOIN: Network joined
+JOIN: NetID 000013 DevAddr ..:..:..:..
+JOIN: Done
TX: MSGHEX 22 bytes
RX :+MSGHEX: Start
+MSGHEX: FPENDING
+MSGHEX: RXWIN1, RSSI -41, SNR 9.0
+MSGHEX: Done
TX: MSGHEX 22 bytes
RX :+MSGHEX: Start
+MSGHEX: Done
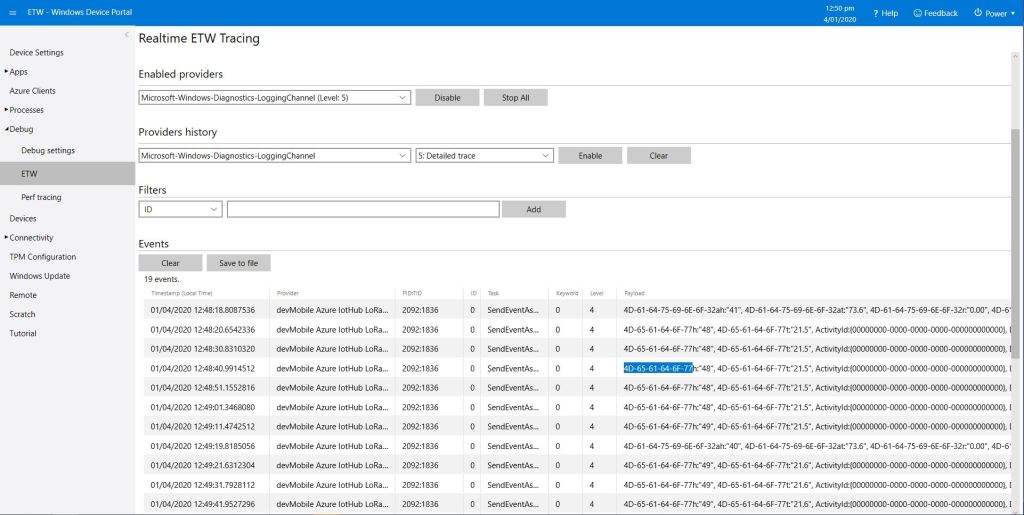
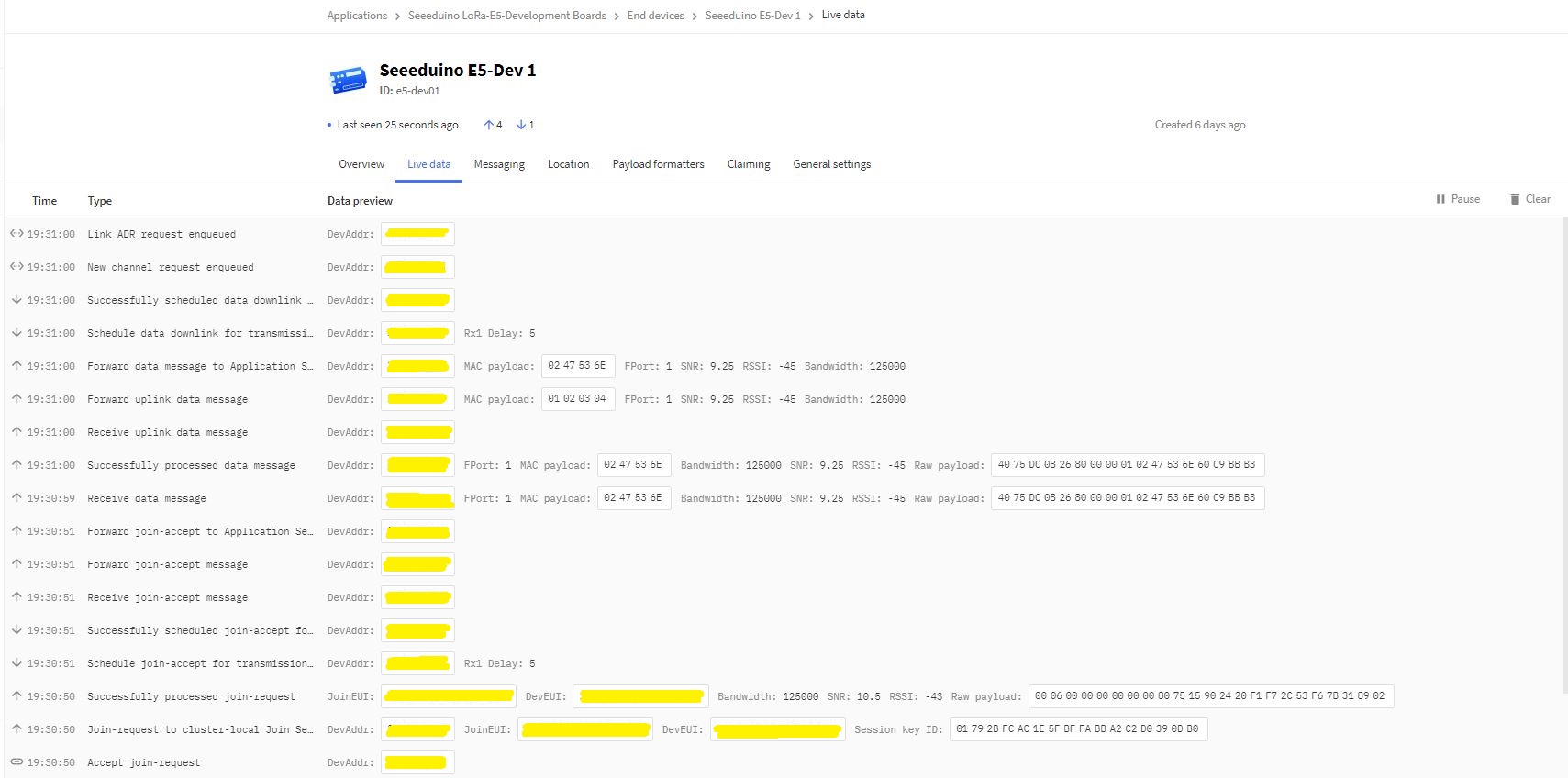
In the Visual Studio 2019 debug output I could see messages getting sent and then after a short delay they were visible in the TTI console.
I had an issue with how the AppUI parameter was handled
private const string AppKey = "................................";
//txByteCount = serialDevice.Write(UTF8Encoding.UTF8.GetBytes($"AT+ID=AppEui,{AppEui}\r\n"));
//private const string AppEui = "................";
//txByteCount = serialDevice.Write(UTF8Encoding.UTF8.GetBytes($"AT+ID=AppEui,\"{AppEui}\"\r\n"));
private const string AppEui = ".. .. .. .. .. .. .. ..";
It appears that If the appkey (or other string parameter) has spaces it has to be enclosed in quotations.