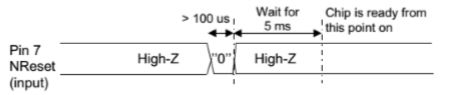
I have spent a lot of time debugging Serial Peripheral Interface(SPI) device libraries and the .Net Core 5 dotnet/iot library will have its own subtleties(with SPI it’s all about timing). I have written GHI Electronics TinyCLR, Wilderness Labs Meadow, Windows 10 IoT Core, .NET MicroFramework and .NET nanoFramework libraries the SX127X family of devices so building a .Net Core 5 one seemed like a good place to start.
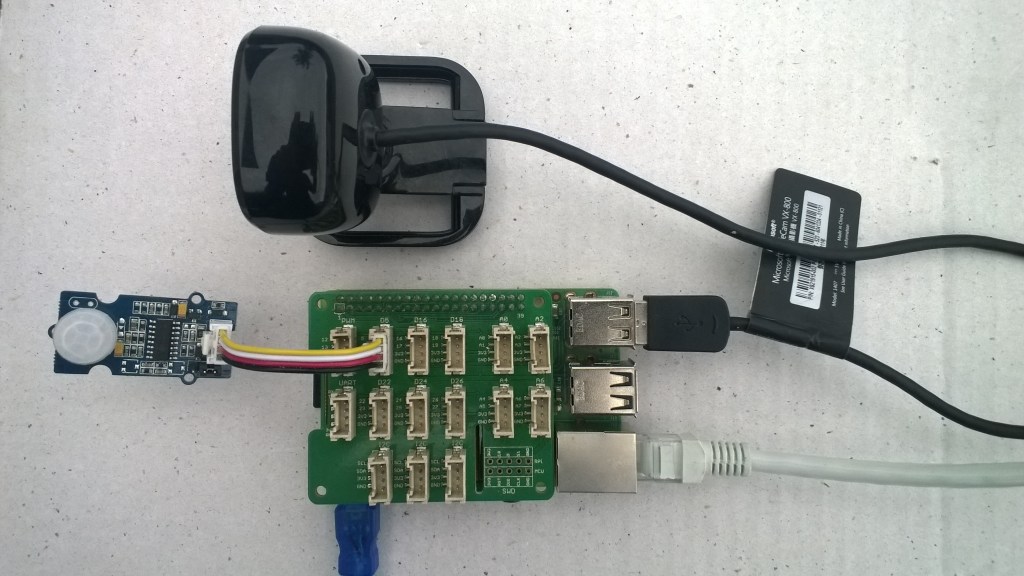
I’m using a Uputronics Raspberry PiZero LoRa(TM) Expansion Board which supports both standard Chip Select(CS) pins (switch selectable which is really useful) and an M2M 1 Channel LoRaWan Gateway Shield for Raspberry PI which has a “non-standard” CS pin.
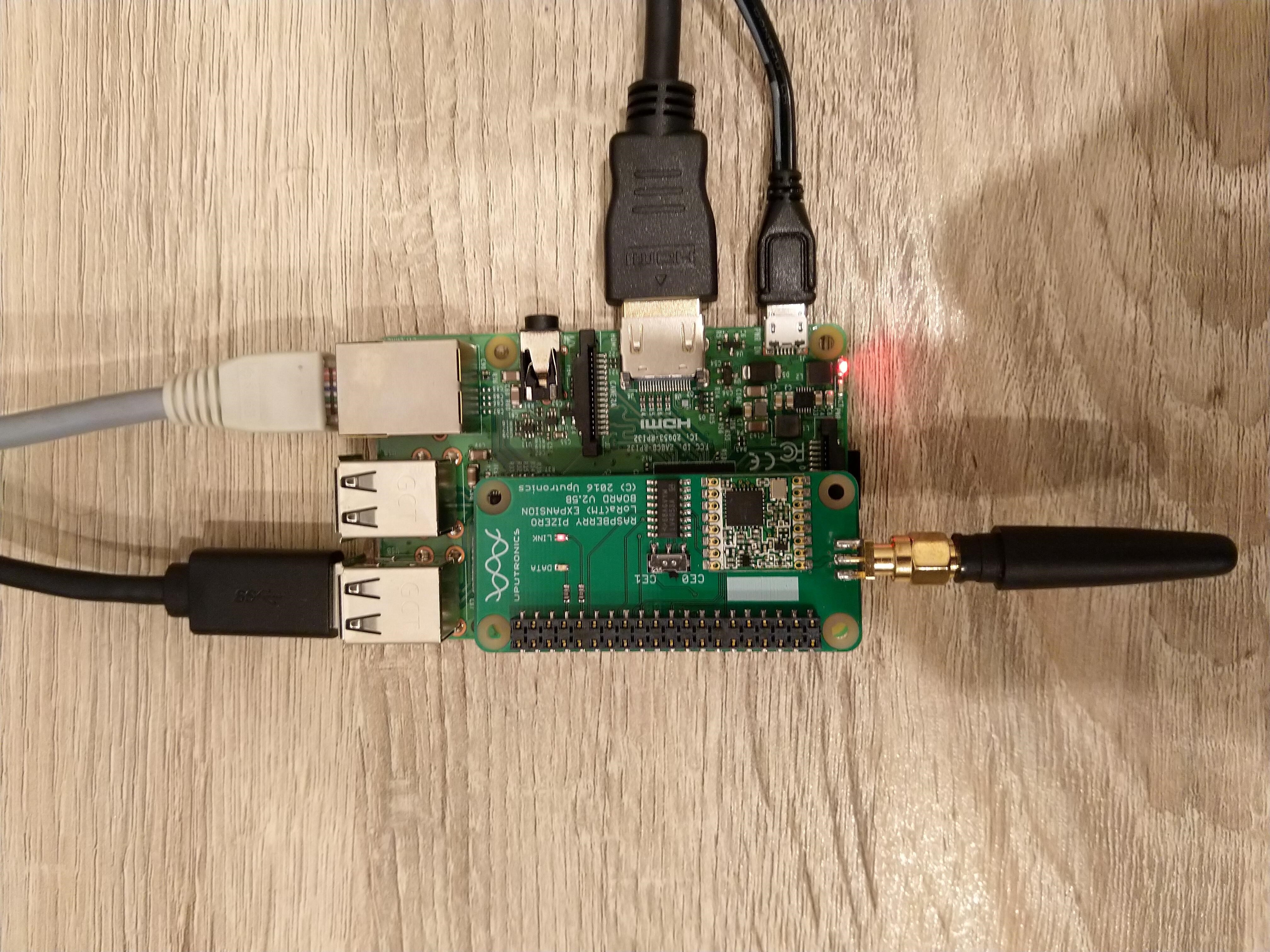
The Uputronics pHat has a pair of Light Emitting Diodes(LEDs) so I adapted some code from a previous post to flash these to confirm the card was working.
static void UputronicsLeds()
{
const int RedLedPinNumber = 6;
const int GreenLedPinNumber = 13;
GpioController controller = new GpioController(PinNumberingScheme.Logical);
controller.OpenPin(RedLedPinNumber, PinMode.Output);
controller.OpenPin(GreenLedPinNumber, PinMode.Output);
while (true)
{
if (controller.Read(RedLedPinNumber) == PinValue.Low)
{
controller.Write(RedLedPinNumber, PinValue.High);
controller.Write(GreenLedPinNumber, PinValue.Low);
}
else
{
controller.Write(RedLedPinNumber, PinValue.Low);
controller.Write(GreenLedPinNumber, PinValue.High);
}
Thread.Sleep(1000);
}
}
The first Uputronics pHat version using spiDevice.TransferFullDuplex didn’t work. I tried allocating memory for the buffers with new and stackalloc which didn’t seem to make any difference in my trivial example. I tried different Chip Select(CS) pin options, frequencies and modes (the mode used is based on the timings specified in the SX127X datasheet).
static void TransferFullDuplex()
{
//byte[] writeBuffer = new byte[1]; // Memory allocation didn't seem to make any difference
//byte[] readBuffer = new byte[1];
Span<byte> writeBuffer = stackalloc byte[1];
Span<byte> readBuffer = stackalloc byte[1];
//var settings = new SpiConnectionSettings(0)
var settings = new SpiConnectionSettings(0, 0)
//var settings = new SpiConnectionSettings(0, 1)
{
ClockFrequency = 5000000,
//ClockFrequency = 500000, // Frequency didn't seem to make any difference
Mode = SpiMode.Mode0, // From SemTech docs pg 80 CPOL=0, CPHA=0
};
SpiDevice spiDevice = SpiDevice.Create(settings);
Thread.Sleep(500);
while (true)
{
try
{
for (byte registerIndex = 0; registerIndex <= 0x42; registerIndex++)
{
writeBuffer[0] = registerIndex;
spiDevice.TransferFullDuplex(writeBuffer, readBuffer);
//Debug.WriteLine("Register 0x{0:x2} - Value 0X{1:x2} - Bits {2}", writeBuffer[0], readBuffer[0], Convert.ToString(readBuffer[0], 2).PadLeft(8, '0')); // Debug output stopped after roughly 3 times round for loop often debugger would barf as well
Console.WriteLine("Register 0x{0:x2} - Value 0X{1:x2} - Bits {2}", writeBuffer[0], readBuffer[0], Convert.ToString(readBuffer[0], 2).PadLeft(8, '0'));
// Would be nice if SpiDevice has a TransferSequential
/*
writeBuffer[0] = registerIndex;
spiDevice.TransferSequential(writeBuffer, readBuffer);
Console.WriteLine("Register 0x{0:x2} - Value 0X{1:x2} - Bits {2}", writeBuffer[0], readBuffer[0], Convert.ToString(readBuffer[0], 2).PadLeft(8, '0'));
*/
}
Console.WriteLine("");
Thread.Sleep(5000);
}
catch (Exception ex)
{
Console.WriteLine(ex.Message);
}
}
}
The second Uputronics pHat version using spiDevice.ReadByte() and spiDevice.WriteBye() didn’t work either.
static void ReadWriteChipSelectStandard()
{
var settings = new SpiConnectionSettings(0) // Doesn't work
// var settings = new SpiConnectionSettings(0, 0) // Doesn't work
//var settings = new SpiConnectionSettings(0, 1) // Doesn't Work
{
ClockFrequency = 5000000,
ChipSelectLineActiveState = PinValue.Low,
Mode = SpiMode.Mode0, // From SemTech docs pg 80 CPOL=0, CPHA=0
};
SpiDevice spiDevice = SpiDevice.Create(settings);
Thread.Sleep(500);
while (true)
{
try
{
for (byte registerIndex = 0; registerIndex <= 0x42; registerIndex++)
{
spiDevice.WriteByte(registerIndex);
//Thread.Sleep(5); These made no difference
//Thread.Sleep(10);
//Thread.Sleep(20);
//Thread.Sleep(40);
byte registerValue = spiDevice.ReadByte();
Console.WriteLine("Register 0x{0:x2} - Value 0X{1:x2} - Bits {2}", registerIndex, registerValue, Convert.ToString(registerValue, 2).PadLeft(8, '0'));
}
Console.WriteLine("");
Thread.Sleep(5000);
}
catch (Exception ex)
{
Console.WriteLine(ex.Message);
}
}
}
The third Uputronics pHat version using spiDevice.ReadByte() and spiDevice.WriteByte() with DIY Chip Select(CS) worked. In previous SPI device libraries I have found that “managing” the CS line in code can be easier to get working The MicroFramework also has more connectionSettings options for better control of CS line timings which reduces the need for DIY.
static void ReadWriteChipSelectDiy()
{
const int CSPinNumber = 8; // CS0
//const int CSPinNumber = 7; // CS1
// DIY CS0 implented with GPIO pin application controls
GpioController controller = new GpioController(PinNumberingScheme.Logical);
controller.OpenPin(CSPinNumber, PinMode.Output);
//controller.Write(CSPinNumber, PinValue.High);
//var settings = new SpiConnectionSettings(0) // Doesn't work
var settings = new SpiConnectionSettings(0, 1) // Works, have to point at unused CS1, this could be a problem is other device on CS1
//var settings = new SpiConnectionSettings(0, 0) // Works, have to point at unused CS0, this could be a problem is other device on CS0
{
ClockFrequency = 5000000,
Mode = SpiMode.Mode0, // From SemTech docs pg 80 CPOL=0, CPHA=0
};
SpiDevice spiDevice = SpiDevice.Create(settings);
Thread.Sleep(500);
while (true)
{
try
{
for (byte registerIndex = 0; registerIndex <= 0x42; registerIndex++)
{
controller.Write(CSPinNumber, PinValue.Low);
spiDevice.WriteByte(registerIndex);
//Thread.Sleep(2); // This maybe necessary
byte registerValue = spiDevice.ReadByte();
controller.Write(CSPinNumber, PinValue.High);
Console.WriteLine("Register 0x{0:x2} - Value 0X{1:x2} - Bits {2}", registerIndex, registerValue, Convert.ToString(registerValue, 2).PadLeft(8, '0'));
}
Console.WriteLine("");
Thread.Sleep(5000);
}
catch (Exception ex)
{
Console.WriteLine(ex.Message);
}
}
}
The dotNet/IoT doesn’t support (July2021) the option to “exclusively” open a port so there could be issues with other applications assuming they control CS0/CS1.
Loaded '/usr/lib/dotnet/shared/Microsoft.NETCore.App/5.0.4/Microsoft.Win32.Primitives.dll'. Skipped loading symbols. Module is optimized and the debugger option 'Just My Code' is enabled.
Register 0x00 - Value 0X00 - Bits 00000000
Register 0x01 - Value 0X09 - Bits 00001001
Register 0x02 - Value 0X1a - Bits 00011010
Register 0x03 - Value 0X0b - Bits 00001011
Register 0x04 - Value 0X00 - Bits 00000000
Register 0x05 - Value 0X52 - Bits 01010010
Register 0x06 - Value 0X6c - Bits 01101100
Register 0x07 - Value 0X80 - Bits 10000000
Register 0x08 - Value 0X00 - Bits 00000000
Register 0x09 - Value 0X4f - Bits 01001111
Register 0x0a - Value 0X09 - Bits 00001001
Register 0x0b - Value 0X2b - Bits 00101011
Register 0x0c - Value 0X20 - Bits 00100000
Register 0x0d - Value 0X08 - Bits 00001000
Register 0x0e - Value 0X02 - Bits 00000010
Register 0x0f - Value 0X0a - Bits 00001010
Register 0x10 - Value 0Xff - Bits 11111111
Register 0x11 - Value 0X70 - Bits 01110000
Register 0x12 - Value 0X15 - Bits 00010101
Register 0x13 - Value 0X0b - Bits 00001011
Register 0x14 - Value 0X28 - Bits 00101000
Register 0x15 - Value 0X0c - Bits 00001100
Register 0x16 - Value 0X12 - Bits 00010010
Register 0x17 - Value 0X47 - Bits 01000111
Register 0x18 - Value 0X32 - Bits 00110010
Register 0x19 - Value 0X3e - Bits 00111110
Register 0x1a - Value 0X00 - Bits 00000000
Register 0x1b - Value 0X00 - Bits 00000000
Register 0x1c - Value 0X00 - Bits 00000000
Register 0x1d - Value 0X00 - Bits 00000000
Register 0x1e - Value 0X00 - Bits 00000000
Register 0x1f - Value 0X40 - Bits 01000000
Register 0x20 - Value 0X00 - Bits 00000000
Register 0x21 - Value 0X00 - Bits 00000000
Register 0x22 - Value 0X00 - Bits 00000000
Register 0x23 - Value 0X00 - Bits 00000000
Register 0x24 - Value 0X05 - Bits 00000101
Register 0x25 - Value 0X00 - Bits 00000000
Register 0x26 - Value 0X03 - Bits 00000011
Register 0x27 - Value 0X93 - Bits 10010011
Register 0x28 - Value 0X55 - Bits 01010101
Register 0x29 - Value 0X55 - Bits 01010101
Register 0x2a - Value 0X55 - Bits 01010101
Register 0x2b - Value 0X55 - Bits 01010101
Register 0x2c - Value 0X55 - Bits 01010101
Register 0x2d - Value 0X55 - Bits 01010101
Register 0x2e - Value 0X55 - Bits 01010101
Register 0x2f - Value 0X55 - Bits 01010101
Register 0x30 - Value 0X90 - Bits 10010000
Register 0x31 - Value 0X40 - Bits 01000000
Register 0x32 - Value 0X40 - Bits 01000000
Register 0x33 - Value 0X00 - Bits 00000000
Register 0x34 - Value 0X00 - Bits 00000000
Register 0x35 - Value 0X0f - Bits 00001111
Register 0x36 - Value 0X00 - Bits 00000000
Register 0x37 - Value 0X00 - Bits 00000000
Register 0x38 - Value 0X00 - Bits 00000000
Register 0x39 - Value 0Xf5 - Bits 11110101
Register 0x3a - Value 0X20 - Bits 00100000
Register 0x3b - Value 0X82 - Bits 10000010
Register 0x3c - Value 0Xf6 - Bits 11110110
Register 0x3d - Value 0X02 - Bits 00000010
Register 0x3e - Value 0X80 - Bits 10000000
Register 0x3f - Value 0X40 - Bits 01000000
Register 0x40 - Value 0X00 - Bits 00000000
Register 0x41 - Value 0X00 - Bits 00000000
Register 0x42 - Value 0X12 - Bits 00010010
The fourth Uputronics pHat version using spiDevice.TransferFullDuplex with read and write buffers two bytes long and the leading bye of the response ignored worked.
...
while (true)
{
try
{
for (byte registerIndex = 0; registerIndex <= 0x42; registerIndex++)
{
// Doesn't work
writeBuffer[0] = registerIndex;
spiDevice.TransferFullDuplex(writeBuffer, readBuffer);
Console.WriteLine("Register 0x{0:x2} - Value 0X{1:x2} - Bits {2}", registerIndex, readBuffer[0], Convert.ToString(readBuffer[0], 2).PadLeft(8, '0'));
// Does work
writeBuffer[0] = registerIndex;
spiDevice.TransferFullDuplex(writeBuffer, readBuffer);
Console.WriteLine("Register 0x{0:x2} - Value 0X{1:x2} - Bits {2}", registerIndex, readBuffer[1], Convert.ToString(readBuffer[1], 2).PadLeft(8, '0'));
// Does work
writeBuffer[1] = registerIndex;
spiDevice.TransferFullDuplex(writeBuffer, readBuffer);
Console.WriteLine("Register 0x{0:x2} - Value 0X{1:x2} - Bits {2}", registerIndex, readBuffer[1], Convert.ToString(readBuffer[1], 2).PadLeft(8, '0'));
Console.WriteLine("");
}
Console.WriteLine("");
Thread.Sleep(5000);
}
catch (Exception ex)
{
Console.WriteLine(ex.Message);
}
}
Register 0x00 - Value 0X00 - Bits 00000000
Register 0x00 - Value 0X00 - Bits 00000000
Register 0x00 - Value 0X00 - Bits 00000000
...
Register 0x42 - Value 0X00 - Bits 00000000
Register 0x42 - Value 0X12 - Bits 00010010
Register 0x42 - Value 0X12 - Bits 00010010

The first M2M pHat version using SpiDevice.Read and SpiDevice.Write with a “custom” CS pin worked.
...
// Chip select with pin which isn't CS0 or CS1 needs M2M shield
static void ReadWriteDiyChipSelectNonStandard()
{
const int CSPinNumber = 25;
// DIY CS0 implented with GPIO pin application controls
GpioController controller = new GpioController(PinNumberingScheme.Logical);
controller.OpenPin(CSPinNumber, PinMode.Output);
//controller.Write(CSPinNumber, PinValue.High);
// Work, this could be a problem is other device on CS0/CS1
var settings = new SpiConnectionSettings(0)
//var settings = new SpiConnectionSettings(0, 0)
//var settings = new SpiConnectionSettings(0, 1)
{
ClockFrequency = 5000000,
Mode = SpiMode.Mode0, // From SemTech docs pg 80 CPOL=0, CPHA=0
};
SpiDevice spiDevice = SpiDevice.Create(settings);
Thread.Sleep(500);
while (true)
{
try
{
for (byte registerIndex = 0; registerIndex <= 0x42; registerIndex++)
{
controller.Write(CSPinNumber, PinValue.Low);
spiDevice.WriteByte(registerIndex);
//Thread.Sleep(2); // This maybe necessary
byte registerValue = spiDevice.ReadByte();
controller.Write(CSPinNumber, PinValue.High);
Console.WriteLine("Register 0x{0:x2} - Value 0X{1:x2} - Bits {2}", registerIndex, registerValue, Convert.ToString(registerValue, 2).PadLeft(8, '0'));
}
Console.WriteLine("");
Thread.Sleep(5000);
}
catch (Exception ex)
{
Console.WriteLine(ex.Message);
}
}
}
The second M2M pHat version using SpiDevice.TransferFullDuplex with a “custom” CS pin also worked.
while (true)
{
try
{
for (byte registerIndex = 0; registerIndex <= 0x42; registerIndex++)
{
writeBuffer[0] = registerIndex;
//writeBuffer[1] = registerIndex;
controller.Write(CSPinNumber, PinValue.Low);
spiDevice.TransferFullDuplex(writeBuffer, readBuffer);
controller.Write(CSPinNumber, PinValue.High);
Console.WriteLine("Register 0x{0:x2} - Value 0X{1:x2} - Bits {2}", registerIndex, readBuffer[1], Convert.ToString(readBuffer[1], 2).PadLeft(8, '0'));
}
Console.WriteLine("");
Thread.Sleep(5000);
}
catch (Exception ex)
{
Console.WriteLine(ex.Message);
}
}
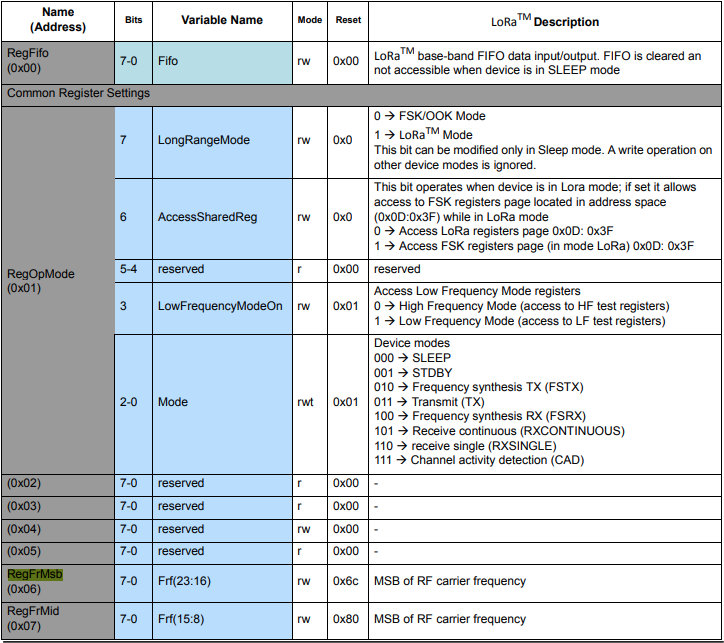
The next step was to read an array of bytes, using spiDevice.TransferFullDuplex. The SX127X transmit/receive frequency is specified in registers 0x06 RegFrMSB, 0x07 RegFrMid, and 0x08 RegFrLsb. The default frequency is 868MHz which is 0xE4, 0xC0, 0x00
static void TransferFullDuplexBufferBytesRead()
{
const byte length = 3;
byte[] writeBuffer = new byte[length + 1];
byte[] readBuffer = new byte[length + 1];
// Read the frequency which is 3 bytes RegFrMsb 0x6c, RegFrMid 0x80, RegFrLsb 0x00
writeBuffer[0] = 0x06; //
// Works, have to point at unused CS0/CS1, others could be a problem is another another SPI device is on on CS0/CS1
//var settings = new SpiConnectionSettings(0)
var settings = new SpiConnectionSettings(0, 0)
//var settings = new SpiConnectionSettings(0, 1)
{
ClockFrequency = 5000000,
Mode = SpiMode.Mode0, // From SemTech docs pg 80 CPOL=0, CPHA=0
};
SpiDevice spiDevice = SpiDevice.Create(settings);
spiDevice.TransferFullDuplex(writeBuffer, readBuffer);
Console.WriteLine($"Register 0x06-0x{readBuffer[1]:x2} 0x07-0x{readBuffer[2]:x2} 0x08-0x{readBuffer[3]:x2}");
}
-------------------------------------------------------------------
You may only use the Microsoft .NET Core Debugger (vsdbg) with
Visual Studio Code, Visual Studio or Visual Studio for Mac software
to help you develop and test your applications.
-------------------------------------------------------------------
Loaded '/usr/lib/dotnet/shared/Microsoft.NETCore.App/5.0.4/System.Private.CoreLib.dll'. Skipped loading symbols. Module is optimized and the debugger option 'Just My Code' is enabled.
...
Loaded '/usr/lib/dotnet/shared/Microsoft.NETCore.App/5.0.4/Microsoft.Win32.Primitives.dll'. Skipped loading symbols. Module is optimized and the debugger option 'Just My Code' is enabled.
Register 0x06-0xe4 0x07-0xc0 0x08-0x00
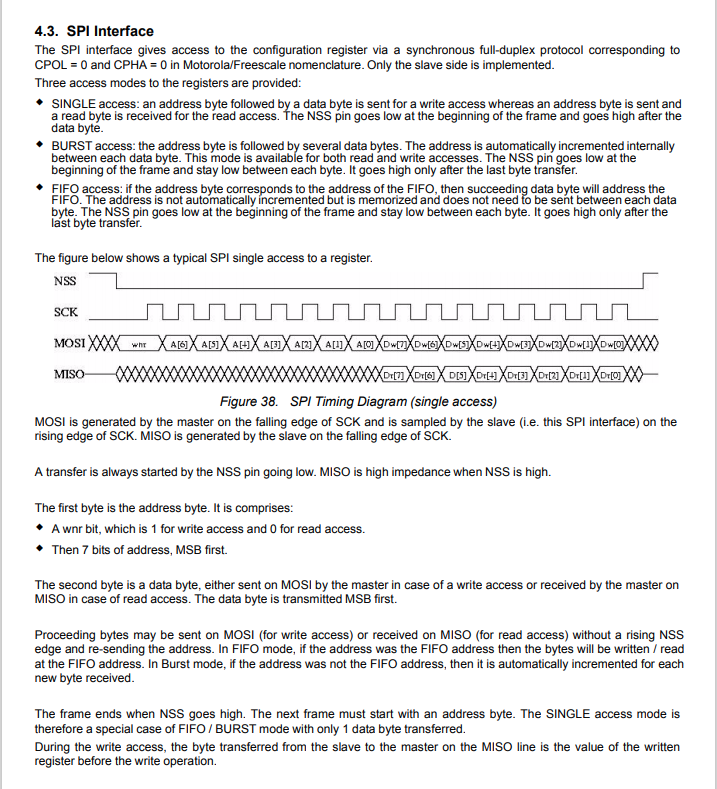
The final step was write an array of bytes, using spiDevice.TransferFullDuplex to change the transmit/receive frequency to 915MHz. To write a value the first bit of the address byte must be set to 1 hence the 0x86 RegFrMsb address.
static void TransferFullDuplexBufferBytesWrite()
{
const byte length = 3;
byte[] writeBuffer = new byte[length + 1];
byte[] readBuffer = new byte[length + 1];
// Write the frequency which is 3 bytes RegFrMsb 0x6c, RegFrMid 0x80, RegFrLsb or with 0x00 the write mask
writeBuffer[0] = 0x86 ;
// Works, have to point at unused CS0/CS1, others could be a problem is another another SPI device is on on CS0/CS1
//var settings = new SpiConnectionSettings(0)
var settings = new SpiConnectionSettings(0, 0)
//var settings = new SpiConnectionSettings(0, 1)
{
ClockFrequency = 5000000,
Mode = SpiMode.Mode0, // From SemTech docs pg 80 CPOL=0, CPHA=0
};
SpiDevice spiDevice = SpiDevice.Create(settings);
// Set the frequency to 915MHz
writeBuffer[1] = 0xE4;
writeBuffer[2] = 0xC0;
writeBuffer[3] = 0x00;
spiDevice.TransferFullDuplex(writeBuffer, readBuffer);
}
-------------------------------------------------------------------
You may only use the Microsoft .NET Core Debugger (vsdbg) with
Visual Studio Code, Visual Studio or Visual Studio for Mac software
to help you develop and test your applications.
-------------------------------------------------------------------
Loaded '/usr/lib/dotnet/shared/Microsoft.NETCore.App/5.0.4/System.Private.CoreLib.dll'. Skipped loading symbols. Module is optimized and the debugger option 'Just My Code' is enabled.
...
Loaded '/usr/lib/dotnet/shared/Microsoft.NETCore.App/5.0.4/Microsoft.Win32.Primitives.dll'. Skipped loading symbols. Module is optimized and the debugger option 'Just My Code' is enabled.
Register 0x06-0x6c 0x07-0x80 0x08-0x00
Register 0x06-0xe4 0x07-0xc0 0x08-0x00
The program 'dotnet' has exited with code 0 (0x0).
Summary
This exceptionally long post was to highlight that with SPI it’s all about timing, first read the datasheet, then build code to validate your understanding.
Some platforms have native TransferSequential implementations but the dotNet/IoT library only has TransferFullDuplex. SPI hardware is always full duplex, if “sequential” is available the implementation will write the provided bytes and then follow them with zeros to read the requested bytes.