Random wanderings through Microsoft Azure esp. PaaS plumbing, the IoT bits, AI on Micro controllers, AI on Edge Devices, .NET nanoFramework, .NET Core on *nix and ML.NET+ONNX
class Program
{
static void Main(string[] args)
{
int messageCount = 1;
// Uptronics has no reset pin uses CS0 or CS1
//SX127XDevice sX127XDevice = new SX127XDevice(25, chipSelectLine: 0);
//SX127XDevice sX127XDevice = new SX127XDevice(25, chipSelectLine: 1);
// M2M device has reset pin uses non standard chip select
//SX127XDevice sX127XDevice = new SX127XDevice(4, chipSelectLine: 0, chipSelectLogicalPinNumber: 25, resetPin: 17);
SX127XDevice sX127XDevice = new SX127XDevice(4, chipSelectLine: 1, chipSelectLogicalPinNumber: 25, resetPinNumber: 17);
// Put device into LoRa + Sleep mode
sX127XDevice.WriteByte(0x01, 0b10000000); // RegOpMode
// Set the frequency to 915MHz
byte[] frequencyBytes = { 0xE4, 0xC0, 0x00 }; // RegFrMsb, RegFrMid, RegFrLsb
sX127XDevice.WriteBytes(0x06, frequencyBytes);
sX127XDevice.WriteByte(0x0F, 0x0); // RegFifoRxBaseAddress
// More power PA Boost
sX127XDevice.WriteByte(0x09, 0b10000000); // RegPaConfig
sX127XDevice.WriteByte(0x40, 0b00000000); // RegDioMapping1 0b00000000 DI0 RxReady & TxReady
sX127XDevice.WriteByte(0x01, 0b10000101); // RegOpMode set LoRa & RxContinuous
while (true)
{
sX127XDevice.WriteByte(0x0E, 0x0); // RegFifoTxBaseAddress
// Set the Register Fifo address pointer
sX127XDevice.WriteByte(0x0D, 0x0); // RegFifoAddrPtr
string messageText = "Hello LoRa from .NET Core! " + messageCount.ToString();
messageCount += 1;
// load the message into the fifo
byte[] messageBytes = UTF8Encoding.UTF8.GetBytes(messageText);
sX127XDevice.WriteBytes(0x00, messageBytes); // RegFifoAddrPtr
// Set the length of the message in the fifo
sX127XDevice.WriteByte(0x22, (byte)messageBytes.Length); // RegPayloadLength
sX127XDevice.WriteByte(0x40, 0b01000000); // RegDioMapping1 0b00000000 DI0 RxReady & TxReady
sX127XDevice.WriteByte(0x01, 0b10000011); // RegOpMode
Debug.WriteLine($"Sending {messageBytes.Length} bytes message {messageText}");
Thread.Sleep(10000);
}
}
}
For the SX127X to transmit and receive messages the device has to be put into sleep mode (RegOpMode), the frequency set to 915MHz(RegFrMsb, RegFrMid, RegFrLsb) and the receiver enabled(RxContinuous). In addition interrupts have to be enabled(RegDioMapping1) on message received(RxReady) and message sent(TxReady).
When running the applications sleeps the SX127X module(RegOpMode), writes the message payload to the buffer(RegFifoAddrPtr,RegPayloadLength) then turns on the transmitter(RegOpMode). When has message arrived or a message has been sent the DI0 pin is strobed, the type of interrupt is determined (RegIrqFlags) and processed accordingly. Once the interrupt has been processed the interrupt flags(RegIrqFlags) are cleared, the receiver re-enabled and the interrupt mappings reset(RegDioMapping1) reset.
Loaded '/usr/lib/dotnet/shared/Microsoft.NETCore.App/5.0.4/System.Memory.dll'. Skipped loading symbols. Module is optimized and the debugger option 'Just My Code' is enabled.
Sending 28 bytes message Hello LoRa from .NET Core! 1
RegIrqFlags 00001000
Transmit-Done
RegIrqFlags 01010000
Receive-Message
Received 32 byte message HeLoRa World! I'm a Node! 880000
Sending 28 bytes message Hello LoRa from .NET Core! 2
RegIrqFlags 00001000
Transmit-Done
RegIrqFlags 01010000
Receive-Message
Received 32 byte message HeLoRa World! I'm a Node! 890000
Sending 28 bytes message Hello LoRa from .NET Core! 3
RegIrqFlags 00001000
Transmit-Done
RegIrqFlags 01010000
Receive-Message
Received 32 byte message HeLoRa World! I'm a Node! 900000
Sending 28 bytes message Hello LoRa from .NET Core! 4
RegIrqFlags 00001000
Transmit-Done
RegIrqFlags 01010000
Receive-Message
Received 32 byte message HeLoRa World! I'm a Node! 910000
Sending 28 bytes message Hello LoRa from .NET Core! 5
RegIrqFlags 00001000
Transmit-Done
RegIrqFlags 01010000
Receive-Message
Received 32 byte message HeLoRa World! I'm a Node! 920000
class Program
{
static void Main(string[] args)
{
// M2M device has reset pin uses non standard chip select
SX127XDevice sX127XDevice = new SX127XDevice(chipSelectLine: 1, chipSelectLogicalPinNumber: 25, resetPin: 17);
// Put device into LoRa + Sleep mode
sX127XDevice.WriteByte(0x01, 0b10000000); // RegOpMode
// Set the frequency to 915MHz
byte[] frequencyBytes = { 0xE4, 0xC0, 0x00 }; // RegFrMsb, RegFrMid, RegFrLsb
sX127XDevice.WriteBytes(0x06, frequencyBytes);
sX127XDevice.WriteByte(0x0F, 0x0); // RegFifoRxBaseAddress
sX127XDevice.WriteByte(0x01, 0b10000101); // RegOpMode set LoRa & RxContinuous
while (true)
{
// Wait until a packet is received, no timeouts in PoC
Console.WriteLine("Receive-Wait");
byte IrqFlags = sX127XDevice.ReadByte(0x12); // RegIrqFlags
while ((IrqFlags & 0b01000000) == 0) // wait until RxDone cleared
{
Thread.Sleep(100);
IrqFlags = sX127XDevice.ReadByte(0x12); // RegIrqFlags
Debug.Write(".");
}
Console.WriteLine("");
Console.WriteLine($"RegIrqFlags {Convert.ToString((byte)IrqFlags, 2).PadLeft(8, '0')}");
Console.WriteLine("Receive-Message");
byte currentFifoAddress = sX127XDevice.ReadByte(0x10); // RegFifiRxCurrent
sX127XDevice.WriteByte(0x0d, currentFifoAddress); // RegFifoAddrPtr
byte numberOfBytes = sX127XDevice.ReadByte(0x13); // RegRxNbBytes
// Read the message from the FIFO
byte[] messageBytes = sX127XDevice.ReadBytes(0x00, numberOfBytes);
sX127XDevice.WriteByte(0x0d, 0);
sX127XDevice.WriteByte(0x12, 0b11111111); // RegIrqFlags clear all the bits
string messageText = UTF8Encoding.UTF8.GetString(messageBytes);
Console.WriteLine($"Received {messageBytes.Length} byte message {messageText}");
Console.WriteLine("Receive-Done");
}
}
}
There wasn’t much code to configure the SX127X to receive messages. The device has to be put into sleep mode (RegOpMode), the frequency set to 915MHz(RegFrMsb, RegFrMid, RegFrLsb) and receiver enabled(RxContinuous).
While running the applications polls (RegIrqFlags) until a message has arrived (RxDone). It then gets a pointer to the start of the message buffer (RegFifiRxCurrent, RegFifoAddrPtr), gets the message length, and then reads the message (RegPayloadLength, RegFifo) from the buffer. Finally the flags are reset ready for the next message(RegIrqFlags)
Loaded '/usr/lib/dotnet/shared/Microsoft.NETCore.App/5.0.4/System.Memory.dll'. Skipped loading symbols. Module is optimized and the debugger option 'Just My Code' is enabled.
Sending 28 bytes message Hello LoRa from .NET Core! 1
RegIrqFlags 00001000
Transmit-Done
RegIrqFlags 01010000
Receive-Message
Received 31 byte message HeLoRa World! I'm a Node! 20000
Sending 28 bytes message Hello LoRa from .NET Core! 2
RegIrqFlags 00001000
Transmit-Done
RegIrqFlags 01010000
Receive-Message
Received 31 byte message HeLoRa World! I'm a Node! 30000
Sending 28 bytes message Hello LoRa from .NET Core! 3
RegIrqFlags 00001000
Transmit-Done
RegIrqFlags 01010000
Receive-Message
Received 31 byte message HeLoRa World! I'm a Node! 40000
Sending 28 bytes message Hello LoRa from .NET Core! 4
RegIrqFlags 00001000
Transmit-Done
RegIrqFlags 01010000
Receive-Message
Received 31 byte message HeLoRa World! I'm a Node! 50000
Sending 28 bytes message Hello LoRa from .NET Core! 5
RegIrqFlags 00001000
Transmit-Done
RegIrqFlags 01010000
Receive-Message
Received 31 byte message HeLoRa World! I'm a Node! 60000
Sending 28 bytes message Hello LoRa from .NET Core! 6
RegIrqFlags 00001000
Transmit-Done
RegIrqFlags 01010000
Receive-Message
Received 31 byte message HeLoRa World! I'm a Node! 70000
Sending 28 bytes message Hello LoRa from .NET Core! 7
RegIrqFlags 00001000
Transmit-Done
RegIrqFlags 01010000
Receive-Message
Received 31 byte message HeLoRa World! I'm a Node! 80000
Sending 28 bytes message Hello LoRa from .NET Core! 8
RegIrqFlags 00001000
Transmit-Done
My first attempt didn’t have much range so I tried turning on the PA_BOOST pin (in RegPaConfig) which improved the range and Received Signal Strength Indication (RSSI).
Arduino Monitor displaying received messages
There was quite a bit of code to configure the SX127X to Transmit messages. I had to put the device into sleep mode (RegOpMode), set the frequency to 915MHz(RegFrMsb, RegFrMid, RegFrLsb), and set the output power(RegPaConfig). Then for each message reset the pointer to the start of the message buffer(RegFifoTxBaseAddress, RegFifoAddrPtr), load the message into the buffer (RegPayloadLength), then turn on the transmitter(RegOpMode), and then finally poll (RegIrqFlags) until the message was sent(TxDone).
class Program
{
static void Main(string[] args)
{
Byte regOpMode;
ushort preamble;
byte[] frequencyBytes;
// M2M device has reset pin uses non standard chip select
SX127XDevice sX127XDevice = new SX127XDevice(chipSelectLine: 1, chipSelectLogicalPinNumber: 25, resetPin: 17);
// Put device into LoRa + Sleep mode
sX127XDevice.WriteByte(0x01, 0b10000000); // RegOpMode
// Set the frequency to 915MHz
byte[] frequencyWriteBytes = { 0xE4, 0xC0, 0x00 }; // RegFrMsb, RegFrMid, RegFrLsb
sX127XDevice.WriteBytes(0x06, frequencyWriteBytes);
// More power PA Boost
sX127XDevice.WriteByte(0x09, 0b10000000); // RegPaConfig
while (true)
{
sX127XDevice.WriteByte(0x0E, 0x0); // RegFifoTxBaseAddress
// Set the Register Fifo address pointer
sX127XDevice.WriteByte(0x0D, 0x0); // RegFifoAddrPtr
string messageText = "Hello LoRa from .NET Core!";
// load the message into the fifo
byte[] messageBytes = UTF8Encoding.UTF8.GetBytes(messageText);
foreach (byte b in messageBytes)
{
sX127XDevice.WriteByte(0x0, b); // RegFifo
}
// Set the length of the message in the fifo
sX127XDevice.WriteByte(0x22, (byte)messageBytes.Length); // RegPayloadLength
Debug.WriteLine($"Sending {messageBytes.Length} bytes message \"{messageText}\"");
/// Set the mode to LoRa + Transmit
sX127XDevice.WriteByte(0x01, 0b10000011); // RegOpMode
// Wait until send done, no timeouts in PoC
Debug.WriteLine("Send-wait");
byte IrqFlags = sX127XDevice.ReadByte(0x12); // RegIrqFlags
while ((IrqFlags & 0b00001000) == 0) // wait until TxDone cleared
{
Thread.Sleep(10);
IrqFlags = sX127XDevice.ReadByte(0x12); // RegIrqFlags
Debug.Write(".");
}
Debug.WriteLine("");
sX127XDevice.WriteByte(0x12, 0b00001000); // clear TxDone bit
Debug.WriteLine("Send-Done");
Thread.Sleep(30000);
}
}
}
Loaded '/usr/lib/dotnet/shared/Microsoft.NETCore.App/5.0.4/System.Memory.dll'. Skipped loading symbols. Module is optimized and the debugger option 'Just My Code' is enabled.
Sending 26 bytes message "Hello LoRa from .NET Core!"
Send-wait
....
Send-Done
Sending 26 bytes message "Hello LoRa from .NET Core!"
Send-wait
...
Send-Done
Sending 26 bytes message "Hello LoRa from .NET Core!"
Send-wait
...
Send-Done
Sending 26 bytes message "Hello LoRa from .NET Core!"
Send-wait
...
Send-Done
Sending 26 bytes message "Hello LoRa from .NET Core!"
Send-wait
...
Send-Done
Sending 26 bytes message "Hello LoRa from .NET Core!"
Send-wait
...
Send-Done
Sending 26 bytes message "Hello LoRa from .NET Core!"
Send-wait
...
Send-Done
static void Main(string[] args)
{
Byte regOpMode;
ushort preamble;
byte[] frequencyBytes;
// Uptronics has no reset pin uses CS0 or CS1
//SX127XDevice sX127XDevice = new SX127XDevice(chipSelectLine: 0);
//SX127XDevice sX127XDevice = new SX127XDevice(chipSelectLine: 1);
// M2M device has reset pin uses non standard chip select
//SX127XDevice sX127XDevice = new SX127XDevice(chipSelectLine: 0, chipSelectLogicalPinNumber: 25, resetPin: 17);
SX127XDevice sX127XDevice = new SX127XDevice(chipSelectLine: 1, chipSelectLogicalPinNumber:25, resetPin: 17);
Console.WriteLine("In FSK mode");
sX127XDevice.RegisterDump();
Console.WriteLine("Read RegOpMode (read byte)");
regOpMode = sX127XDevice.ReadByte(0x1);
Debug.WriteLine($"RegOpMode 0x{regOpMode:x2}");
Console.WriteLine("Set LoRa mode and sleep mode (write byte)");
sX127XDevice.WriteByte(0x01, 0b10000000);
Console.WriteLine("Read RegOpMode (read byte)");
regOpMode = sX127XDevice.ReadByte(0x1);
Debug.WriteLine($"RegOpMode 0x{regOpMode:x2}");
Console.WriteLine("In LoRa mode");
sX127XDevice.RegisterDump();
Console.WriteLine("Read the preamble (read word)"); // Should be 0x08
preamble = sX127XDevice.ReadWordMsbLsb(0x20);
Debug.WriteLine($"Preamble 0x{preamble:x2} - Bits {Convert.ToString(preamble, 2).PadLeft(16, '0')}");
Console.WriteLine("Set the preamble to 0x8000 (write word)");
sX127XDevice.WriteWordMsbLsb(0x20, 0x8000);
Console.WriteLine("Read the preamble (read word)"); // Should be 0x08
preamble = sX127XDevice.ReadWordMsbLsb(0x20);
Debug.WriteLine($"Preamble 0x{preamble:x2} - Bits {Convert.ToString(preamble, 2).PadLeft(16, '0')}");
Console.WriteLine("Read the centre frequency"); // RegFrfMsb 0x6c RegFrfMid 0x80 RegFrfLsb 0x00 which is 433MHz
frequencyBytes = sX127XDevice.ReadBytes(0x06, 3);
Console.WriteLine($"Frequency Msb 0x{frequencyBytes[0]:x2} Mid 0x{frequencyBytes[1]:x2} Lsb 0x{frequencyBytes[2]:x2}");
Console.WriteLine("Set the centre frequency");
byte[] frequencyWriteBytes = { 0xE4, 0xC0, 0x00 };
sX127XDevice.WriteBytes(0x06, frequencyWriteBytes);
Console.WriteLine("Read the centre frequency"); // RegFrfMsb 0xE4 RegFrfMid 0xC0 RegFrfLsb 0x00 which is 915MHz
frequencyBytes = sX127XDevice.ReadBytes(0x06, 3);
Console.WriteLine($"Frequency Msb 0x{frequencyBytes[0]:x2} Mid 0x{frequencyBytes[1]:x2} Lsb 0x{frequencyBytes[2]:x2}");
sX127XDevice.RegisterDump();
// Sleep forever
Thread.Sleep(-1);
}
I use RegisterDump multiple times to show the updates working.
...
Loaded '/usr/lib/dotnet/shared/Microsoft.NETCore.App/5.0.4/Microsoft.Win32.Primitives.dll'. Skipped loading symbols. Module is optimized and the debugger option 'Just My Code' is enabled.
In FSK mode
Register dump
Register 0x00 - Value 0X00 - Bits 00000000
Register 0x01 - Value 0X09 - Bits 00001001
Register 0x02 - Value 0X1a - Bits 00011010
Register 0x03 - Value 0X0b - Bits 00001011
Register 0x04 - Value 0X00 - Bits 00000000
Register 0x05 - Value 0X52 - Bits 01010010
Register 0x06 - Value 0X6c - Bits 01101100
Register 0x07 - Value 0X80 - Bits 10000000
...
Register 0x1f - Value 0X40 - Bits 01000000
Register 0x20 - Value 0X00 - Bits 00000000
Register 0x21 - Value 0X00 - Bits 00000000
Register 0x22 - Value 0X00 - Bits 00000000
...
Register 0x41 - Value 0X00 - Bits 00000000
Register 0x42 - Value 0X12 - Bits 00010010
Read RegOpMode (read byte)
RegOpMode 0x09
Set LoRa mode and sleep mode (write byte)
Read RegOpMode (read byte)
RegOpMode 0x80
In LoRa mode
Register dump
Register 0x00 - Value 0Xdf - Bits 11011111
Register 0x01 - Value 0X80 - Bits 10000000
Register 0x02 - Value 0X1a - Bits 00011010
Register 0x03 - Value 0X0b - Bits 00001011
Register 0x04 - Value 0X00 - Bits 00000000
Register 0x05 - Value 0X52 - Bits 01010010
Register 0x06 - Value 0X6c - Bits 01101100
Register 0x07 - Value 0X80 - Bits 10000000
...
Register 0x1f - Value 0X64 - Bits 01100100
Register 0x20 - Value 0X00 - Bits 00000000
Register 0x21 - Value 0X08 - Bits 00001000
Register 0x22 - Value 0X01 - Bits 00000001
...
Register 0x41 - Value 0X00 - Bits 00000000
Register 0x42 - Value 0X12 - Bits 00010010
Read the preamble (read word)
Preamble 0x08 - Bits 0000000000001000
Set the preamble to 0x8000 (write word)
Read the preamble (read word)
Preamble 0x8000 - Bits 1000000000000000
Read the centre frequency
Frequency Msb 0x6c Mid 0x80 Lsb 0x00
Set the centre frequency
Read the centre frequency
Frequency Msb 0xe4 Mid 0xc0 Lsb 0x00
Register dump
Register 0x00 - Value 0Xb9 - Bits 10111001
Register 0x01 - Value 0X80 - Bits 10000000
Register 0x02 - Value 0X1a - Bits 00011010
Register 0x03 - Value 0X0b - Bits 00001011
Register 0x04 - Value 0X00 - Bits 00000000
Register 0x05 - Value 0X52 - Bits 01010010
Register 0x06 - Value 0Xe4 - Bits 11100100
Register 0x07 - Value 0Xc0 - Bits 11000000
...
Register 0x1f - Value 0X64 - Bits 01100100
Register 0x20 - Value 0X80 - Bits 10000000
Register 0x21 - Value 0X00 - Bits 00000000
Register 0x22 - Value 0X01 - Bits 00000001
...
Register 0x3f - Value 0X00 - Bits 00000000
Register 0x40 - Value 0X00 - Bits 00000000
Summary
In this iteration I added support for resetting the SX127X module (where supported by the Raspberry PI HAT) and an spiDevice.TransferFullDuplex based implementation for reading/writing individual bytes/words and reading/writing arrays of bytes.
public byte[] ReadBytes(byte registerAddress, byte length)
{
Span<byte> writeBuffer = stackalloc byte[length + 1];
Span<byte> readBuffer = stackalloc byte[writeBuffer.Length];
if (SX127XTransceiver == null)
{
throw new ApplicationException("SX127XDevice is not initialised");
}
writeBuffer[0] = registerAddress &= RegisterAddressReadMask;
if (this.ChipSelectLogicalPinNumber != 0)
{
gpioController.Write(ChipSelectLogicalPinNumber, PinValue.Low);
}
this.SX127XTransceiver.TransferFullDuplex(writeBuffer, readBuffer);
if (this.ChipSelectLogicalPinNumber != 0)
{
gpioController.Write(ChipSelectLogicalPinNumber, PinValue.High);
}
return readBuffer[1..readBuffer.Length].ToArray();
}
public void WriteBytes(byte address, byte[] bytes)
{
Span<byte> writeBuffer = stackalloc byte[bytes.Length + 1];
Span<byte> readBuffer = stackalloc byte[writeBuffer.Length];
if (SX127XTransceiver == null)
{
throw new ApplicationException("SX127XDevice is not initialised");
}
writeBuffer[0] = address |= RegisterAddressWriteMask;
for (byte index = 0; index < bytes.Length; index++)
{
writeBuffer[index + 1] = bytes[index];
}
if (this.ChipSelectLogicalPinNumber != 0)
{
gpioController.Write(ChipSelectLogicalPinNumber, PinValue.Low);
}
this.SX127XTransceiver.TransferFullDuplex(writeBuffer, readBuffer);
if (this.ChipSelectLogicalPinNumber != 0)
{
gpioController.Write(ChipSelectLogicalPinNumber, PinValue.High);
}
}
In the WriteBytes method copying the bytes from the bytes[] parameter to the span with a for loop is a bit ugly but I couldn’t find a better way. One odd thing I noticed was that if I wrote a lot of debug output the text would be truncated in the output window
Frequency Msb 0xe4 Mid 0xc0 Lsb 0x00
Register dump
Register 0x00 - Value 0Xb9 - Bits 10111001
Register 0x01 - Value 0X80 - Bits 10000000
Register 0x02 - Value 0X1a - Bits 00011010
Register 0x03 - Value 0X0b - Bits 00001011
Register 0x04 - Value 0X00 - Bits 00000000
Register 0x05 - Value 0X52 - Bits 01010010
Register 0x06 - Value 0Xe4 - Bits 11100100
Register 0x07 - Value 0Xc0 - Bits 11000000
Register 0x08 - Value 0X00 - Bits 00000000
Register 0x09 - Value 0X4f - Bits 01001111
Register 0x0a - Value 0X09 - Bits 00001001
Register 0x0b - Value 0X2b - Bits 00101011
Register 0x0c - Value 0X20 - Bits 00100000
Register 0x0d - Value 0X02 - Bits 00000010
Register 0x0e - Value 0X80 - Bits 10000000
Register 0x0f - Value 0X00 - Bits 00000000
Register 0x10 - Value 0X00 - Bits 00000000
Register 0x11 - Value 0X00 - Bits 00000000
Register 0x12 - Value 0X00 - Bits 00000000
Register 0x13 - Value 0X00 - Bits 00000000
Register 0x14 - Value 0X00 - Bits 00000000
Register 0x15 - Value 0X00 - Bits 00000000
Register 0x16 - Value 0X00 - Bits 00000000
Register 0x17 - Value 0X00 - Bits 00000000
Register 0x18 - Value 0X10 - Bits 00010000
Register 0x19 - Value 0X00 - Bits 00000000
Register 0x1a - Value 0X00 - Bits 00000000
Register 0x1b - Value 0X00 - Bits 00000000
Register 0x1c - Value 0X00 - Bits 00000000
Register 0x1d - Value 0X72 - Bits 01110010
Register 0x1e - Value 0X70 - Bits 01110000
Register 0x1f - Value 0X64 - Bits 01100100
Register 0x20 - Value 0X80 - Bits 10000000
Register 0x21 - Value 0X00 - Bits 00000000
Register 0x22 - Value 0X01 - Bits 00000001
Register 0x23 - Value 0Xff - Bits 11111111
Register 0x24 - Value 0X00 - Bits 00000000
Register 0x25 - Value 0X00 - Bits 00000000
Register 0x26 - Value 0X04 - Bits 00000100
Register 0x27 - Value 0X00 - Bits 00000000
Register 0x28 - Value 0X00 - Bits 00000000
Register 0x29 - Value 0X00 - Bits 00000000
Register 0x2a - Value 0X00 - Bits 00000000
Register 0x2b - Value 0X00 - Bits 00000000
Register 0x2c - Value 0X00 - Bits 00000000
Register 0x2d - Value 0X50 - Bits 01010000
Register 0x2e - Value 0X14 - Bits 00010100
Register 0x2f - Value 0X45 - Bits 01000101
Register 0x30 - Value 0X55 - Bits 01010101
Register 0x31 - Value 0Xc3 - Bits 11000011
Register 0x32 - Value 0X05 - Bits 00000101
Register 0x33 - Value 0X27 - Bits 00100111
Register 0x34 - Value 0X1c - Bits 00011100
Register 0x35 - Value 0X0a - Bits 00001010
Register 0x36 - Value 0X03 - Bits 00000011
Register 0x37 - Value 0X0a - Bits 00001010
Register 0x38 - Value 0X42 - Bits 01000010
Register 0x39 - Value 0X12 - Bits 00010010
Register 0x3a - Value 0X49 - Bits 01001001
Register 0x3b - Value 0X1d - Bits 00011101
Register 0x3c - Value 0X00 - Bits 00000000
Register 0x3d - Value 0Xaf - Bits 10101111
Register 0x3e - Value 0X00 - Bits 00000000
Register 0x3f - Value 0X00 - Bits 00000000
Register 0x40 - Value 0X00 - Bits 00000000
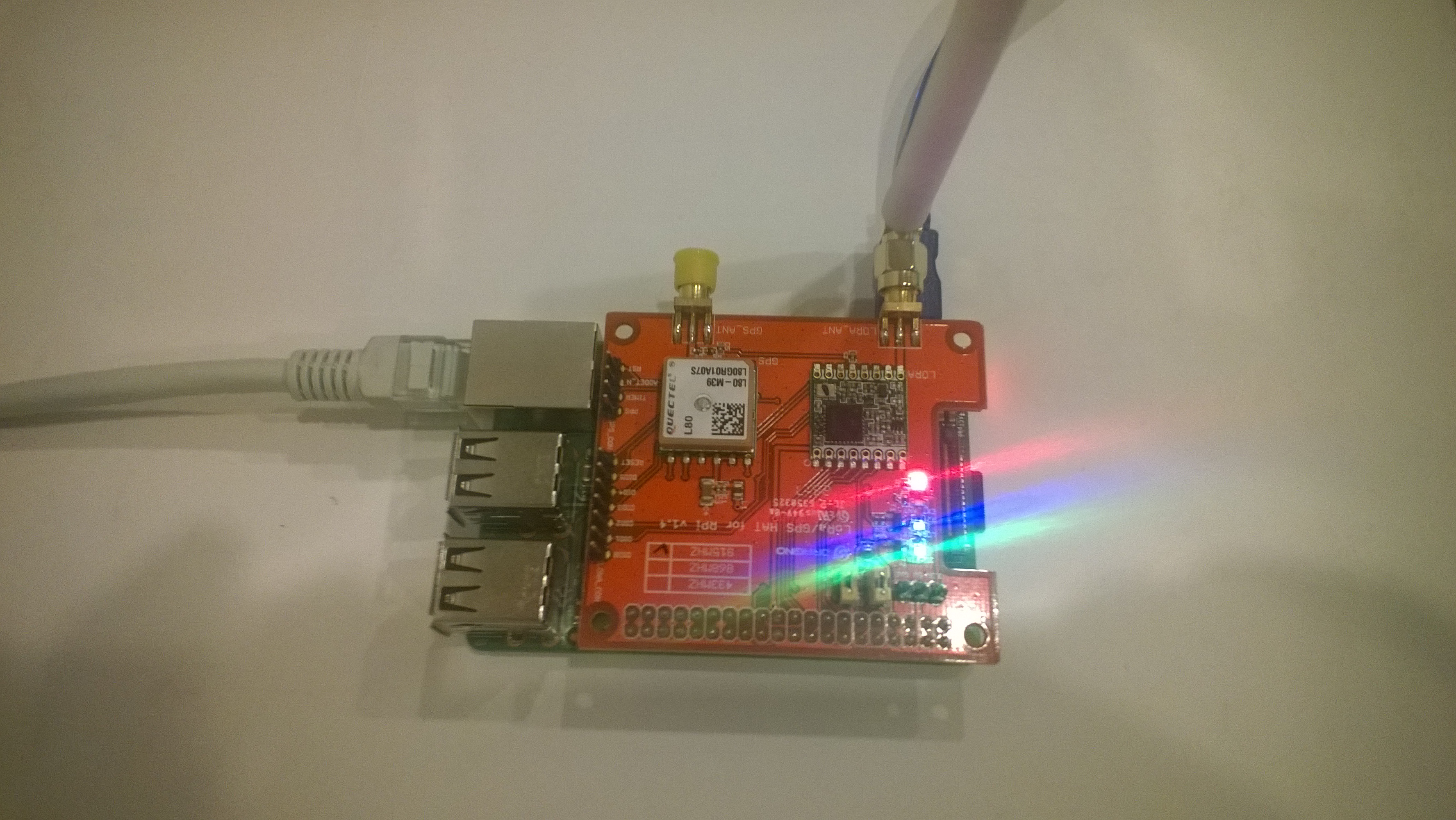
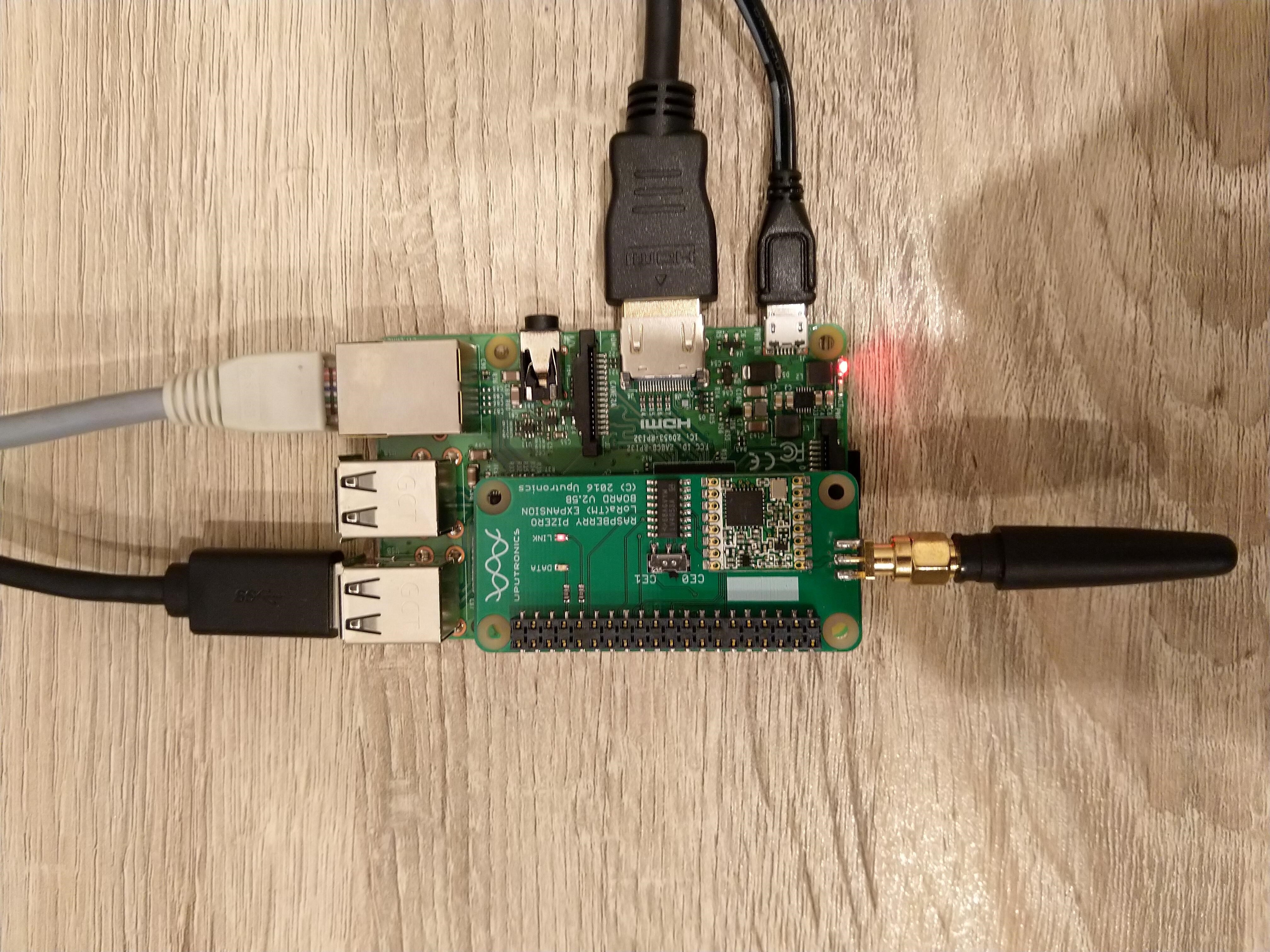
Uputronics Raspberry PIZero LoRa Expansion board on a Raspberry PI 3 device
M2M Single channel shield on Raspberry Pi 3 Device
The spiDevice.ReadByte() and spiDevice.WriteBye() version worked with a custom chip select pin(25) and CS0 or CS1 selected in the SpiConnectionSettings (but this CS line was “unusable” by other applications). This approach also worked with standard select line (CS01 or CS1) if the SpiConnectionSettings was configured to use the “other” CS line and the selected CS pin managed by the application.
namespace devMobile.IoT.SX127x.ShieldSPIWriteRead
{
class Program
{
private const int SpiBusId = 0;
private const int ChipSelectLine = 1; // 0 or 1 for Uputronics depends on the switch, for the others choose CS pin not already in use
#if ChipSelectNonStandard
private const int ChipSelectPinNumber = 25; // 25 for M2M, Dragino etc.
#endif
private const byte RegisterAddress = 0x6; // RegFrfMsb 0x6c
//private const byte RegisterAddress = 0x7; // RegFrfMid 0x80
//private const byte RegisterAddress = 0x8; // RegFrfLsb 0x00
//private const byte RegisterAddress = 0x42; // RegVersion 0x12
static void Main(string[] args)
{
#if ChipSelectNonStandard
GpioController controller = null;
controller = new GpioController(PinNumberingScheme.Logical);
controller.OpenPin(ChipSelectPinNumber, PinMode.Output);
controller.Write(ChipSelectPinNumber, PinValue.High);
#endif
var settings = new SpiConnectionSettings(SpiBusId, ChipSelectLine)
{
ClockFrequency = 5000000,
Mode = SpiMode.Mode0, // From SemTech docs pg 80 CPOL=0, CPHA=0
};
SpiDevice spiDevice = SpiDevice.Create(settings);
Thread.Sleep(500);
while (true)
{
#if ChipSelectNonStandard
controller.Write(ChipSelectPinNumber, PinValue.Low);
#endif
spiDevice.WriteByte(RegisterAddress);
byte registerValue = spiDevice.ReadByte();
#if ChipSelectNonStandard
controller.Write(ChipSelectPinNumber, PinValue.High);
#endif
byte registerValue = readBuffer[writeBuffer.Length - 1];
Console.WriteLine($"Register 0x{RegisterAddress:x2} - Value 0X{registerValue:x2} - Bits {Convert.ToString(registerValue, 2).PadLeft(8, '0')}");
Thread.Sleep(5000);
}
}
}
}
The spiDevice.TransferFullDuplex worked for a standard CS line (CS0 or CS1), and for a non-standard CS line, though the CS line configured in SpiConnectionSettings was “unusable” by other applications “.
namespace devMobile.IoT.SX127x.ShieldSPITransferFullDuplex
{
class Program
{
private const int SpiBusId = 0;
private const int ChipSelectLine = 0; // 0 or 1 for Uputronics depends on the switch, for the others choose CS pin not already in use
#if ChipSelectNonStandard
private const int ChipSelectPinNumber = 25; // 25 for M2M, Dragino etc.
#endif
private const byte RegisterAddress = 0x6; // RegFrfMsb 0x6c
//private const byte RegisterAddress = 0x7; // RegFrfMid 0x80
//private const byte RegisterAddress = 0x8; // RegFrfLsb 0x00
//private const byte RegisterAddress = 0x42; // RegVersion 0x12
static void Main(string[] args)
{
#if ChipSelectNonStandard
GpioController controller = null;
controller = new GpioController(PinNumberingScheme.Logical);
controller.OpenPin(ChipSelectPinNumber, PinMode.Output);
controller.Write(ChipSelectPinNumber, PinValue.High);
#endif
var settings = new SpiConnectionSettings(SpiBusId, ChipSelectLine)
{
ClockFrequency = 5000000,
Mode = SpiMode.Mode0, // From SemTech docs pg 80 CPOL=0, CPHA=0
};
SpiDevice spiDevice = SpiDevice.Create(settings);
Thread.Sleep(500);
while (true)
{
byte[] writeBuffer = new byte[] { RegisterAddress, 0 };
byte[] readBuffer = new byte[writeBuffer.Length];
#if ChipSelectNonStandard
controller.Write(ChipSelectPinNumber, PinValue.Low);
#endif
spiDevice.TransferFullDuplex(writeBuffer, readBuffer);
#if ChipSelectNonStandard
controller.Write(ChipSelectPinNumber, PinValue.High);
#endif
byte registerValue = readBuffer[writeBuffer.Length - 1];
Console.WriteLine($"Register 0x{RegisterAddress:x2} - Value 0X{registerValue:x2} - Bits {Convert.ToString(registerValue, 2).PadLeft(8, '0')}");
Thread.Sleep(5000);
}
}
}
}
The output when the application was working as expected
Loaded '/usr/lib/dotnet/shared/Microsoft.NETCore.App/5.0.4/Microsoft.Win32.Primitives.dll'. Skipped loading symbols. Module is optimized and the debugger option 'Just My Code' is enabled.
Register 0x06 - Value 0X6c - Bits 01101100
Register 0x06 - Value 0X6c - Bits 01101100
Register 0x06 - Value 0X6c - Bits 01101100
Register 0x06 - Value 0X6c - Bits 01101100
Register 0x06 - Value 0X6c - Bits 01101100
Register 0x06 - Value 0X6c - Bits 01101100
The program 'dotnet' has exited with code 0 (0x0).
Summary
Though the spiDevice.TransferFullDuplex code was slightly more complex it worked with both standard and non-standard CS pins.
Uputronics Raspberry PIZero LoRa Expansion board on a Raspberry 3 device
The Uputronics pHat has a pair of Light Emitting Diodes(LEDs) so I adapted some code from a previous post to flash these to confirm the card was working.
static void UputronicsLeds()
{
const int RedLedPinNumber = 6;
const int GreenLedPinNumber = 13;
GpioController controller = new GpioController(PinNumberingScheme.Logical);
controller.OpenPin(RedLedPinNumber, PinMode.Output);
controller.OpenPin(GreenLedPinNumber, PinMode.Output);
while (true)
{
if (controller.Read(RedLedPinNumber) == PinValue.Low)
{
controller.Write(RedLedPinNumber, PinValue.High);
controller.Write(GreenLedPinNumber, PinValue.Low);
}
else
{
controller.Write(RedLedPinNumber, PinValue.Low);
controller.Write(GreenLedPinNumber, PinValue.High);
}
Thread.Sleep(1000);
}
}
The first Uputronics pHat version using spiDevice.TransferFullDuplex didn’t work. I tried allocating memory for the buffers with new and stackalloc which didn’t seem to make any difference in my trivial example. I tried different Chip Select(CS) pin options, frequencies and modes (the mode used is based on the timings specified in the SX127X datasheet).
static void TransferFullDuplex()
{
//byte[] writeBuffer = new byte[1]; // Memory allocation didn't seem to make any difference
//byte[] readBuffer = new byte[1];
Span<byte> writeBuffer = stackalloc byte[1];
Span<byte> readBuffer = stackalloc byte[1];
//var settings = new SpiConnectionSettings(0)
var settings = new SpiConnectionSettings(0, 0)
//var settings = new SpiConnectionSettings(0, 1)
{
ClockFrequency = 5000000,
//ClockFrequency = 500000, // Frequency didn't seem to make any difference
Mode = SpiMode.Mode0, // From SemTech docs pg 80 CPOL=0, CPHA=0
};
SpiDevice spiDevice = SpiDevice.Create(settings);
Thread.Sleep(500);
while (true)
{
try
{
for (byte registerIndex = 0; registerIndex <= 0x42; registerIndex++)
{
writeBuffer[0] = registerIndex;
spiDevice.TransferFullDuplex(writeBuffer, readBuffer);
//Debug.WriteLine("Register 0x{0:x2} - Value 0X{1:x2} - Bits {2}", writeBuffer[0], readBuffer[0], Convert.ToString(readBuffer[0], 2).PadLeft(8, '0')); // Debug output stopped after roughly 3 times round for loop often debugger would barf as well
Console.WriteLine("Register 0x{0:x2} - Value 0X{1:x2} - Bits {2}", writeBuffer[0], readBuffer[0], Convert.ToString(readBuffer[0], 2).PadLeft(8, '0'));
// Would be nice if SpiDevice has a TransferSequential
/*
writeBuffer[0] = registerIndex;
spiDevice.TransferSequential(writeBuffer, readBuffer);
Console.WriteLine("Register 0x{0:x2} - Value 0X{1:x2} - Bits {2}", writeBuffer[0], readBuffer[0], Convert.ToString(readBuffer[0], 2).PadLeft(8, '0'));
*/
}
Console.WriteLine("");
Thread.Sleep(5000);
}
catch (Exception ex)
{
Console.WriteLine(ex.Message);
}
}
}
static void ReadWriteChipSelectStandard()
{
var settings = new SpiConnectionSettings(0) // Doesn't work
// var settings = new SpiConnectionSettings(0, 0) // Doesn't work
//var settings = new SpiConnectionSettings(0, 1) // Doesn't Work
{
ClockFrequency = 5000000,
ChipSelectLineActiveState = PinValue.Low,
Mode = SpiMode.Mode0, // From SemTech docs pg 80 CPOL=0, CPHA=0
};
SpiDevice spiDevice = SpiDevice.Create(settings);
Thread.Sleep(500);
while (true)
{
try
{
for (byte registerIndex = 0; registerIndex <= 0x42; registerIndex++)
{
spiDevice.WriteByte(registerIndex);
//Thread.Sleep(5); These made no difference
//Thread.Sleep(10);
//Thread.Sleep(20);
//Thread.Sleep(40);
byte registerValue = spiDevice.ReadByte();
Console.WriteLine("Register 0x{0:x2} - Value 0X{1:x2} - Bits {2}", registerIndex, registerValue, Convert.ToString(registerValue, 2).PadLeft(8, '0'));
}
Console.WriteLine("");
Thread.Sleep(5000);
}
catch (Exception ex)
{
Console.WriteLine(ex.Message);
}
}
}
The third Uputronics pHat version using spiDevice.ReadByte() and spiDevice.WriteByte() with DIY Chip Select(CS) worked. In previous SPI device libraries I have found that “managing” the CS line in code can be easier to get working The MicroFramework also has more connectionSettings options for better control of CS line timings which reduces the need for DIY.
static void ReadWriteChipSelectDiy()
{
const int CSPinNumber = 8; // CS0
//const int CSPinNumber = 7; // CS1
// DIY CS0 implented with GPIO pin application controls
GpioController controller = new GpioController(PinNumberingScheme.Logical);
controller.OpenPin(CSPinNumber, PinMode.Output);
//controller.Write(CSPinNumber, PinValue.High);
//var settings = new SpiConnectionSettings(0) // Doesn't work
var settings = new SpiConnectionSettings(0, 1) // Works, have to point at unused CS1, this could be a problem is other device on CS1
//var settings = new SpiConnectionSettings(0, 0) // Works, have to point at unused CS0, this could be a problem is other device on CS0
{
ClockFrequency = 5000000,
Mode = SpiMode.Mode0, // From SemTech docs pg 80 CPOL=0, CPHA=0
};
SpiDevice spiDevice = SpiDevice.Create(settings);
Thread.Sleep(500);
while (true)
{
try
{
for (byte registerIndex = 0; registerIndex <= 0x42; registerIndex++)
{
controller.Write(CSPinNumber, PinValue.Low);
spiDevice.WriteByte(registerIndex);
//Thread.Sleep(2); // This maybe necessary
byte registerValue = spiDevice.ReadByte();
controller.Write(CSPinNumber, PinValue.High);
Console.WriteLine("Register 0x{0:x2} - Value 0X{1:x2} - Bits {2}", registerIndex, registerValue, Convert.ToString(registerValue, 2).PadLeft(8, '0'));
}
Console.WriteLine("");
Thread.Sleep(5000);
}
catch (Exception ex)
{
Console.WriteLine(ex.Message);
}
}
}
The dotNet/IoT doesn’t support (July2021) the option to “exclusively” open a port so there could be issues with other applications assuming they control CS0/CS1.
Loaded '/usr/lib/dotnet/shared/Microsoft.NETCore.App/5.0.4/Microsoft.Win32.Primitives.dll'. Skipped loading symbols. Module is optimized and the debugger option 'Just My Code' is enabled.
Register 0x00 - Value 0X00 - Bits 00000000
Register 0x01 - Value 0X09 - Bits 00001001
Register 0x02 - Value 0X1a - Bits 00011010
Register 0x03 - Value 0X0b - Bits 00001011
Register 0x04 - Value 0X00 - Bits 00000000
Register 0x05 - Value 0X52 - Bits 01010010
Register 0x06 - Value 0X6c - Bits 01101100
Register 0x07 - Value 0X80 - Bits 10000000
Register 0x08 - Value 0X00 - Bits 00000000
Register 0x09 - Value 0X4f - Bits 01001111
Register 0x0a - Value 0X09 - Bits 00001001
Register 0x0b - Value 0X2b - Bits 00101011
Register 0x0c - Value 0X20 - Bits 00100000
Register 0x0d - Value 0X08 - Bits 00001000
Register 0x0e - Value 0X02 - Bits 00000010
Register 0x0f - Value 0X0a - Bits 00001010
Register 0x10 - Value 0Xff - Bits 11111111
Register 0x11 - Value 0X70 - Bits 01110000
Register 0x12 - Value 0X15 - Bits 00010101
Register 0x13 - Value 0X0b - Bits 00001011
Register 0x14 - Value 0X28 - Bits 00101000
Register 0x15 - Value 0X0c - Bits 00001100
Register 0x16 - Value 0X12 - Bits 00010010
Register 0x17 - Value 0X47 - Bits 01000111
Register 0x18 - Value 0X32 - Bits 00110010
Register 0x19 - Value 0X3e - Bits 00111110
Register 0x1a - Value 0X00 - Bits 00000000
Register 0x1b - Value 0X00 - Bits 00000000
Register 0x1c - Value 0X00 - Bits 00000000
Register 0x1d - Value 0X00 - Bits 00000000
Register 0x1e - Value 0X00 - Bits 00000000
Register 0x1f - Value 0X40 - Bits 01000000
Register 0x20 - Value 0X00 - Bits 00000000
Register 0x21 - Value 0X00 - Bits 00000000
Register 0x22 - Value 0X00 - Bits 00000000
Register 0x23 - Value 0X00 - Bits 00000000
Register 0x24 - Value 0X05 - Bits 00000101
Register 0x25 - Value 0X00 - Bits 00000000
Register 0x26 - Value 0X03 - Bits 00000011
Register 0x27 - Value 0X93 - Bits 10010011
Register 0x28 - Value 0X55 - Bits 01010101
Register 0x29 - Value 0X55 - Bits 01010101
Register 0x2a - Value 0X55 - Bits 01010101
Register 0x2b - Value 0X55 - Bits 01010101
Register 0x2c - Value 0X55 - Bits 01010101
Register 0x2d - Value 0X55 - Bits 01010101
Register 0x2e - Value 0X55 - Bits 01010101
Register 0x2f - Value 0X55 - Bits 01010101
Register 0x30 - Value 0X90 - Bits 10010000
Register 0x31 - Value 0X40 - Bits 01000000
Register 0x32 - Value 0X40 - Bits 01000000
Register 0x33 - Value 0X00 - Bits 00000000
Register 0x34 - Value 0X00 - Bits 00000000
Register 0x35 - Value 0X0f - Bits 00001111
Register 0x36 - Value 0X00 - Bits 00000000
Register 0x37 - Value 0X00 - Bits 00000000
Register 0x38 - Value 0X00 - Bits 00000000
Register 0x39 - Value 0Xf5 - Bits 11110101
Register 0x3a - Value 0X20 - Bits 00100000
Register 0x3b - Value 0X82 - Bits 10000010
Register 0x3c - Value 0Xf6 - Bits 11110110
Register 0x3d - Value 0X02 - Bits 00000010
Register 0x3e - Value 0X80 - Bits 10000000
Register 0x3f - Value 0X40 - Bits 01000000
Register 0x40 - Value 0X00 - Bits 00000000
Register 0x41 - Value 0X00 - Bits 00000000
Register 0x42 - Value 0X12 - Bits 00010010
The fourth Uputronics pHat version using spiDevice.TransferFullDuplex with read and write buffers two bytes long and the leading bye of the response ignored worked.
...
while (true)
{
try
{
for (byte registerIndex = 0; registerIndex <= 0x42; registerIndex++)
{
// Doesn't work
writeBuffer[0] = registerIndex;
spiDevice.TransferFullDuplex(writeBuffer, readBuffer);
Console.WriteLine("Register 0x{0:x2} - Value 0X{1:x2} - Bits {2}", registerIndex, readBuffer[0], Convert.ToString(readBuffer[0], 2).PadLeft(8, '0'));
// Does work
writeBuffer[0] = registerIndex;
spiDevice.TransferFullDuplex(writeBuffer, readBuffer);
Console.WriteLine("Register 0x{0:x2} - Value 0X{1:x2} - Bits {2}", registerIndex, readBuffer[1], Convert.ToString(readBuffer[1], 2).PadLeft(8, '0'));
// Does work
writeBuffer[1] = registerIndex;
spiDevice.TransferFullDuplex(writeBuffer, readBuffer);
Console.WriteLine("Register 0x{0:x2} - Value 0X{1:x2} - Bits {2}", registerIndex, readBuffer[1], Convert.ToString(readBuffer[1], 2).PadLeft(8, '0'));
Console.WriteLine("");
}
Console.WriteLine("");
Thread.Sleep(5000);
}
catch (Exception ex)
{
Console.WriteLine(ex.Message);
}
}
Register 0x00 - Value 0X00 - Bits 00000000
Register 0x00 - Value 0X00 - Bits 00000000
Register 0x00 - Value 0X00 - Bits 00000000
...
Register 0x42 - Value 0X00 - Bits 00000000
Register 0x42 - Value 0X12 - Bits 00010010
Register 0x42 - Value 0X12 - Bits 00010010
M2M Single channel shield on Raspberry Pi 3 Device
The first M2M pHat version using SpiDevice.Read and SpiDevice.Write with a “custom” CS pin worked.
...
// Chip select with pin which isn't CS0 or CS1 needs M2M shield
static void ReadWriteDiyChipSelectNonStandard()
{
const int CSPinNumber = 25;
// DIY CS0 implented with GPIO pin application controls
GpioController controller = new GpioController(PinNumberingScheme.Logical);
controller.OpenPin(CSPinNumber, PinMode.Output);
//controller.Write(CSPinNumber, PinValue.High);
// Work, this could be a problem is other device on CS0/CS1
var settings = new SpiConnectionSettings(0)
//var settings = new SpiConnectionSettings(0, 0)
//var settings = new SpiConnectionSettings(0, 1)
{
ClockFrequency = 5000000,
Mode = SpiMode.Mode0, // From SemTech docs pg 80 CPOL=0, CPHA=0
};
SpiDevice spiDevice = SpiDevice.Create(settings);
Thread.Sleep(500);
while (true)
{
try
{
for (byte registerIndex = 0; registerIndex <= 0x42; registerIndex++)
{
controller.Write(CSPinNumber, PinValue.Low);
spiDevice.WriteByte(registerIndex);
//Thread.Sleep(2); // This maybe necessary
byte registerValue = spiDevice.ReadByte();
controller.Write(CSPinNumber, PinValue.High);
Console.WriteLine("Register 0x{0:x2} - Value 0X{1:x2} - Bits {2}", registerIndex, registerValue, Convert.ToString(registerValue, 2).PadLeft(8, '0'));
}
Console.WriteLine("");
Thread.Sleep(5000);
}
catch (Exception ex)
{
Console.WriteLine(ex.Message);
}
}
}
The next step was to read an array of bytes, using spiDevice.TransferFullDuplex. The SX127X transmit/receive frequency is specified in registers 0x06 RegFrMSB, 0x07 RegFrMid, and 0x08 RegFrLsb. The default frequency is 868MHz which is 0xE4, 0xC0, 0x00
static void TransferFullDuplexBufferBytesRead()
{
const byte length = 3;
byte[] writeBuffer = new byte[length + 1];
byte[] readBuffer = new byte[length + 1];
// Read the frequency which is 3 bytes RegFrMsb 0x6c, RegFrMid 0x80, RegFrLsb 0x00
writeBuffer[0] = 0x06; //
// Works, have to point at unused CS0/CS1, others could be a problem is another another SPI device is on on CS0/CS1
//var settings = new SpiConnectionSettings(0)
var settings = new SpiConnectionSettings(0, 0)
//var settings = new SpiConnectionSettings(0, 1)
{
ClockFrequency = 5000000,
Mode = SpiMode.Mode0, // From SemTech docs pg 80 CPOL=0, CPHA=0
};
SpiDevice spiDevice = SpiDevice.Create(settings);
spiDevice.TransferFullDuplex(writeBuffer, readBuffer);
Console.WriteLine($"Register 0x06-0x{readBuffer[1]:x2} 0x07-0x{readBuffer[2]:x2} 0x08-0x{readBuffer[3]:x2}");
}
-------------------------------------------------------------------
You may only use the Microsoft .NET Core Debugger (vsdbg) with
Visual Studio Code, Visual Studio or Visual Studio for Mac software
to help you develop and test your applications.
-------------------------------------------------------------------
Loaded '/usr/lib/dotnet/shared/Microsoft.NETCore.App/5.0.4/System.Private.CoreLib.dll'. Skipped loading symbols. Module is optimized and the debugger option 'Just My Code' is enabled.
...
Loaded '/usr/lib/dotnet/shared/Microsoft.NETCore.App/5.0.4/Microsoft.Win32.Primitives.dll'. Skipped loading symbols. Module is optimized and the debugger option 'Just My Code' is enabled.
Register 0x06-0xe4 0x07-0xc0 0x08-0x00
The final step was write an array of bytes, using spiDevice.TransferFullDuplex to change the transmit/receive frequency to 915MHz. To write a value the first bit of the address byte must be set to 1 hence the 0x86 RegFrMsb address.
static void TransferFullDuplexBufferBytesWrite()
{
const byte length = 3;
byte[] writeBuffer = new byte[length + 1];
byte[] readBuffer = new byte[length + 1];
// Write the frequency which is 3 bytes RegFrMsb 0x6c, RegFrMid 0x80, RegFrLsb or with 0x00 the write mask
writeBuffer[0] = 0x86 ;
// Works, have to point at unused CS0/CS1, others could be a problem is another another SPI device is on on CS0/CS1
//var settings = new SpiConnectionSettings(0)
var settings = new SpiConnectionSettings(0, 0)
//var settings = new SpiConnectionSettings(0, 1)
{
ClockFrequency = 5000000,
Mode = SpiMode.Mode0, // From SemTech docs pg 80 CPOL=0, CPHA=0
};
SpiDevice spiDevice = SpiDevice.Create(settings);
// Set the frequency to 915MHz
writeBuffer[1] = 0xE4;
writeBuffer[2] = 0xC0;
writeBuffer[3] = 0x00;
spiDevice.TransferFullDuplex(writeBuffer, readBuffer);
}
-------------------------------------------------------------------
You may only use the Microsoft .NET Core Debugger (vsdbg) with
Visual Studio Code, Visual Studio or Visual Studio for Mac software
to help you develop and test your applications.
-------------------------------------------------------------------
Loaded '/usr/lib/dotnet/shared/Microsoft.NETCore.App/5.0.4/System.Private.CoreLib.dll'. Skipped loading symbols. Module is optimized and the debugger option 'Just My Code' is enabled.
...
Loaded '/usr/lib/dotnet/shared/Microsoft.NETCore.App/5.0.4/Microsoft.Win32.Primitives.dll'. Skipped loading symbols. Module is optimized and the debugger option 'Just My Code' is enabled.
Register 0x06-0x6c 0x07-0x80 0x08-0x00
Register 0x06-0xe4 0x07-0xc0 0x08-0x00
The program 'dotnet' has exited with code 0 (0x0).
Summary
This exceptionally long post was to highlight that with SPI it’s all about timing, first read the datasheet, then build code to validate your understanding.
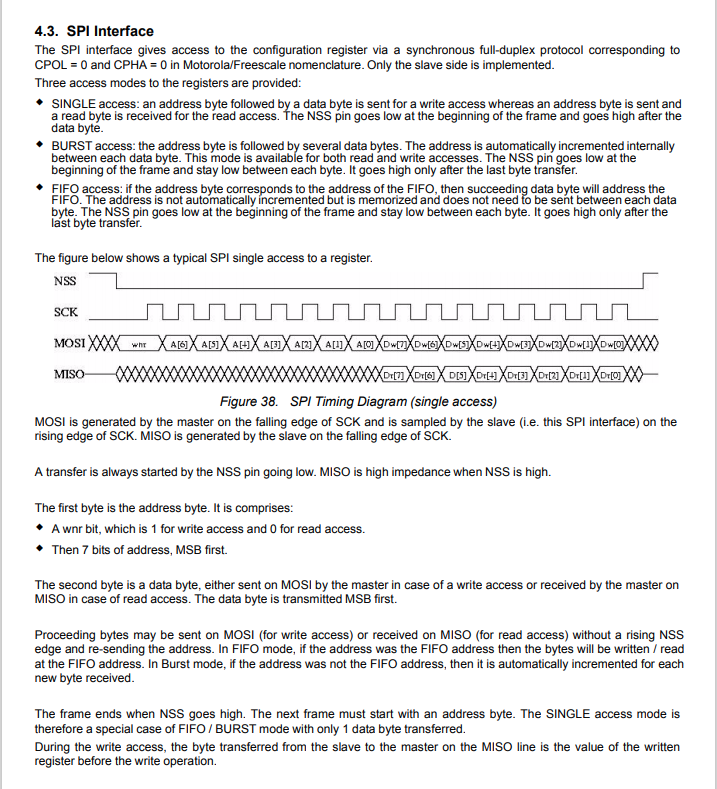
SX127X SPI interface timing diagram
Some platforms have native TransferSequential implementations but the dotNet/IoT library only has TransferFullDuplex. SPI hardware is always full duplex, if “sequential” is available the implementation will write the provided bytes and then follow them with zeros to read the requested bytes.
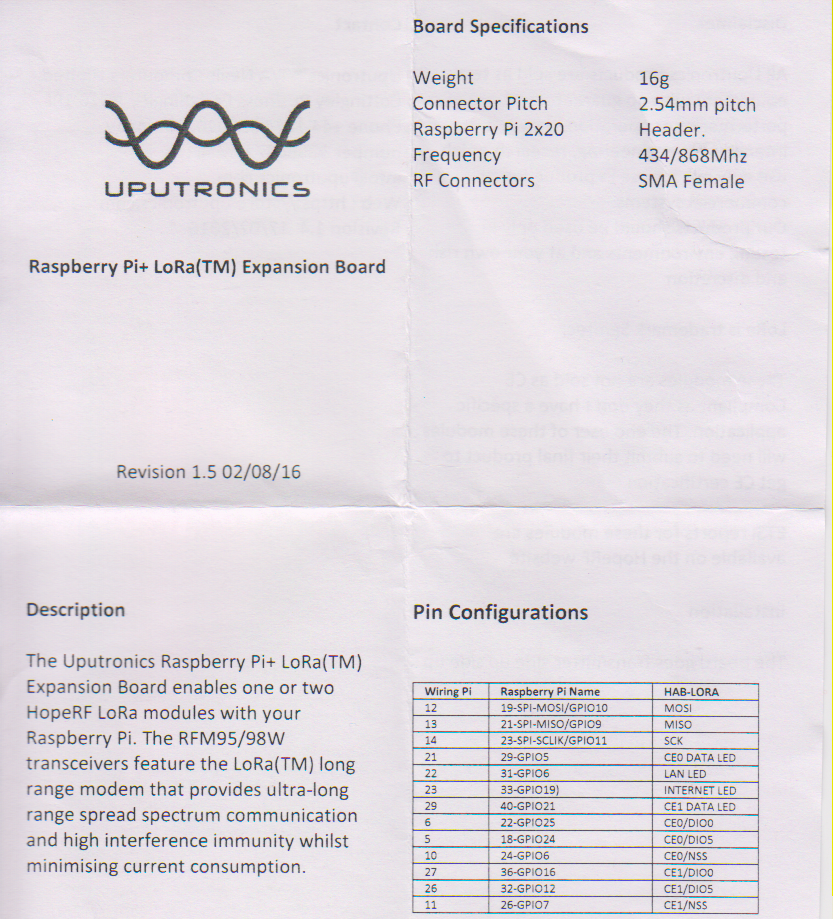
The Raspberry Pi+ LoRa(TM) Expansion Board has two RF modules. In my setup CE0 was 915MHz and CE1 was 433MHz so I modified the demo application so I could run both ports independently or simultaneously.
The shield has four user controlable Light Emitting Diodes(LED) connected to General Purpose Input Output(GPIO) pins which will be useful for providing feedback when trying to debug faults etc..
Some of the pin numbers are also printed on the shield silk screen.
This time the first step was to check the pin assignments of the 4 LEDs
//---------------------------------------------------------------------------------
// Copyright (c) September 2018, devMobile Software
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
//
//---------------------------------------------------------------------------------
namespace devMobile.IoT.Rfm9x.UputronicsRPIPlusLed
{
using System;
using System.Threading;
using Windows.ApplicationModel.Background;
using Windows.Devices.Gpio;
public sealed class StartupTask : IBackgroundTask
{
public void Run(IBackgroundTaskInstance taskInstance)
{
GpioController gpioController = GpioController.GetDefault();
GpioPin ce01LedPin = gpioController.OpenPin(5);
ce01LedPin.SetDriveMode(GpioPinDriveMode.Output);
ce01LedPin.Write(GpioPinValue.Low);
GpioPin ceo2LedPin = gpioController.OpenPin(21);
ceo2LedPin.SetDriveMode(GpioPinDriveMode.Output);
ceo2LedPin.Write(GpioPinValue.High);
GpioPin lanLedPin = gpioController.OpenPin(6);
lanLedPin.SetDriveMode(GpioPinDriveMode.Output);
lanLedPin.Write(GpioPinValue.Low);
GpioPin internetLedPin = gpioController.OpenPin(13);
internetLedPin.SetDriveMode(GpioPinDriveMode.Output);
internetLedPin.Write(GpioPinValue.High);
while (true)
{
if (ce01LedPin.Read() == GpioPinValue.High)
{
ce01LedPin.Write(GpioPinValue.Low);
}
else
{
ce01LedPin.Write(GpioPinValue.High);
}
if (ceo2LedPin.Read() == GpioPinValue.High)
{
ceo2LedPin.Write(GpioPinValue.Low);
}
else
{
ceo2LedPin.Write(GpioPinValue.High);
}
if (lanLedPin.Read() == GpioPinValue.High)
{
lanLedPin.Write(GpioPinValue.Low);
}
else
{
lanLedPin.Write(GpioPinValue.High);
}
if (internetLedPin.Read() == GpioPinValue.High)
{
internetLedPin.Write(GpioPinValue.Low);
}
else
{
internetLedPin.Write(GpioPinValue.High);
}
Thread.Sleep(500);
}
}
}
}
I think there is a small issue with the internet LED it should be GPIO13 (which matches the pin number)
The next step was to get the Serial Peripheral Interface (SPI) interface for both modules working.
//---------------------------------------------------------------------------------
// Copyright (c) September 2018, devMobile Software
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
//
//---------------------------------------------------------------------------------
namespace devMobile.IoT.Rfm9x.UputronicsRPIPlusSPI
{
using System;
using System.Diagnostics;
using System.Threading;
using Windows.ApplicationModel.Background;
using Windows.Devices.Spi;
public sealed class StartupTask : IBackgroundTask
{
public void Run(IBackgroundTaskInstance taskInstance)
{
#if CS0
const int chipSelectPinNumber = 0;
#endif
#if CS1
const int chipSelectPinNumber = 1;
#endif
SpiController spiController = SpiController.GetDefaultAsync().AsTask().GetAwaiter().GetResult();
var settings = new SpiConnectionSettings(chipSelectPinNumber)
{
ClockFrequency = 500000,
Mode = SpiMode.Mode0, // From SemTech docs pg 80 CPOL=0, CPHA=0
};
SpiDevice Device = spiController.GetDevice(settings);
while (true)
{
byte[] writeBuffer = new byte[] { 0x42 }; // RegVersion
byte[] readBuffer = new byte[1];
// Read the RegVersion silicon ID to check SPI works
Device.TransferSequential(writeBuffer, readBuffer);
#if CS0
Debug.WriteLine("CS0 Register RegVer 0x{0:x2} - Value 0X{1:x2} - Bits {2}", writeBuffer[0], readBuffer[0], Convert.ToString(readBuffer[0], 2).PadLeft(8, '0'));
#endif
#if CS1
Debug.WriteLine("CS1 Register RegVer 0x{0:x2} - Value 0X{1:x2} - Bits {2}", writeBuffer[0], readBuffer[0], Convert.ToString(readBuffer[0], 2).PadLeft(8, '0'));
#endif
Thread.Sleep(10000);
}
}
}
}
Like the other uputronics shield I have tested this appears not to have the reset line of the RFM9X connected.
The output confirmed the code worked with both CS0 and CS1 defined
CS0 Register RegVer 0x42 - Value 0X12 - Bits 00010010
CS0 Register RegVer 0x42 - Value 0X12 - Bits 00010010
CS0 Register RegVer 0x42 - Value 0X12 - Bits 00010010
CS0 Register RegVer 0x42 - Value 0X12 - Bits 00010010
CS1 Register RegVer 0x42 - Value 0X12 - Bits 00010010
CS1 Register RegVer 0x42 - Value 0X12 - Bits 00010010
CS1 Register RegVer 0x42 - Value 0X12 - Bits 00010010
Would have been more useful to read RegFrMsb = 0x06, RegFrMid = 0x7, and RegFrLsb = 0x08 so I could see the different default frequencies of the two HopeRF modules. The next step is to build support for this shield into my RFM9X.IoTCore library.
I create another overload of the class constructor
// Constructor for RPI shields with chip select connected to CS0/CS1 and no reset pin e.g. Uputronics
public Rfm9XDevice(ChipSelectPin chipSelectPin, int interruptPinNumber)
{
RegisterManager = new RegisterManager(chipSelectPin);
// Check that SX127X chip is present
Byte regVersionValue = RegisterManager.ReadByte((byte)Registers.RegVersion);
if (regVersionValue != RegVersionValueExpected)
{
throw new ApplicationException("Semtech SX127X not found");
}
GpioController gpioController = GpioController.GetDefault();
// Interrupt pin for RX message, TX done etc. notifications
InterruptGpioPin = gpioController.OpenPin(interruptPinNumber);
InterruptGpioPin.SetDriveMode(GpioPinDriveMode.Input);
InterruptGpioPin.ValueChanged += InterruptGpioPin_ValueChanged;
}
Then disabled the strobing of the reset pin if it was not configured in the Initialise method
I back integrated the code into my Adafruit.IO LoRa gateway and it worked (second time after I fixed the conditional compile directive) just need to do some further stress and soak testing.
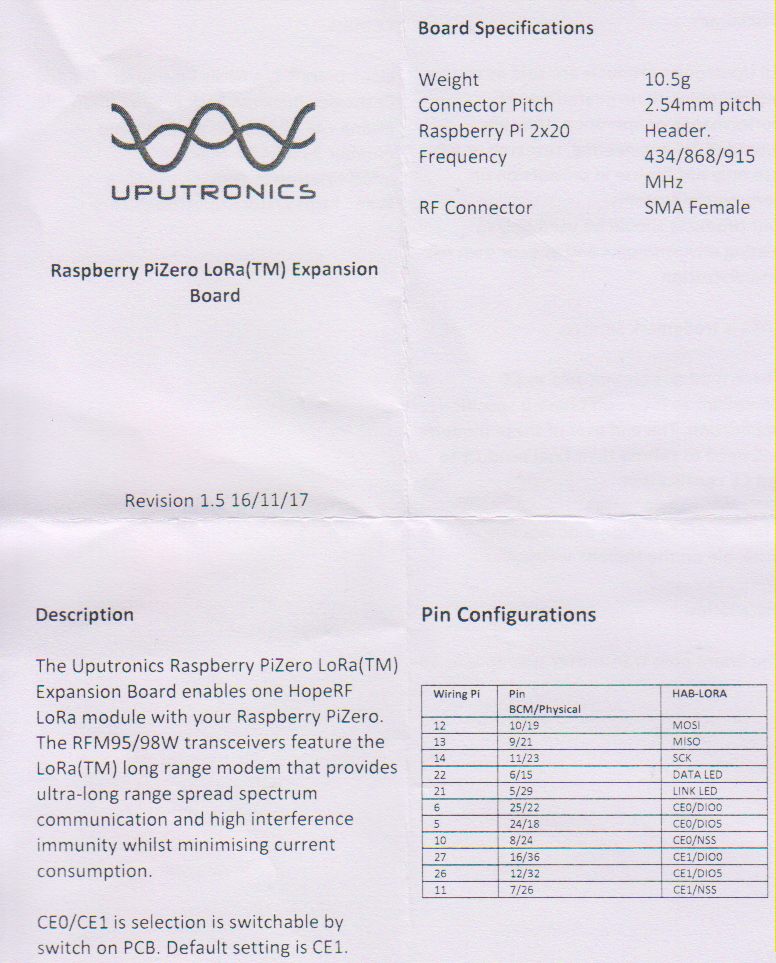
During the week another couple of Raspberry PI2/3/Zero shields arrived from uputronics. The two Raspberry PiZero LoRa(TM) Expansion Boards had arrived earlier so I unpacked them first. They were in small cardboard boxes with bolts+spacers and had a small set of printed instructions which was quite professional.
These shields also have a switch for configuring the chip select line which is quite a neat feature and means they can be stacked. Unlike the other shields I have tested these appear not to have the reset line of the RFM9X connected.
The first step was to get the SPI connectivity sorted
//---------------------------------------------------------------------------------
// Copyright (c) August 2018, devMobile Software
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
//
//---------------------------------------------------------------------------------
namespace devMobile.IoT.Rfm9x.UputronicsRPZeroSPI
{
using System;
using System.Diagnostics;
using System.Threading;
using Windows.ApplicationModel.Background;
using Windows.Devices.Spi;
public sealed class StartupTask : IBackgroundTask
{
public void Run(IBackgroundTaskInstance taskInstance)
{
#if CS0
const int chipSelectPinNumber = 0;
#endif
#if CS1
const int chipSelectPinNumber = 1;
#endif
SpiController spiController = SpiController.GetDefaultAsync().AsTask().GetAwaiter().GetResult();
var settings = new SpiConnectionSettings(chipSelectPinNumber)
{
ClockFrequency = 500000,
Mode = SpiMode.Mode0, // From SemTech docs pg 80 CPOL=0, CPHA=0
};
SpiDevice Device = spiController.GetDevice(settings);
while (true)
{
byte[] writeBuffer = new byte[] { 0x42 }; // RegVersion
byte[] readBuffer = new byte[1];
// Read the RegVersion silicon ID to check SPI works
Device.TransferSequential(writeBuffer, readBuffer);
Debug.WriteLine("Register RegVer 0x{0:x2} - Value 0X{1:x2} - Bits {2}", writeBuffer[0], readBuffer[0], Convert.ToString(readBuffer[0], 2).PadLeft(8, '0'));
Thread.Sleep(10000);
}
}
}
}
The output confirmed the code worked with both CS0 and CS1 defined
Register RegVer 0x42 - Value 0X12 - Bits 00010010
Register RegVer 0x42 - Value 0X12 - Bits 00010010
Register RegVer 0x42 - Value 0X12 - Bits 00010010
The program '[2144] backgroundTaskHost.exe' has exited with code -1 (0xffffffff).
The shield has two onboard Light Emitting Diodes (LEDs) so I wrote a simple test application to flash them alternately.
//---------------------------------------------------------------------------------
// Copyright (c) July 2018, devMobile Software
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
//
//---------------------------------------------------------------------------------
namespace devMobile.IoT.Rfm9x.UputronicsRPZeroLed
{
using System;
using System.Threading;
using Windows.ApplicationModel.Background;
using Windows.Devices.Gpio;
public sealed class StartupTask : IBackgroundTask
{
public void Run(IBackgroundTaskInstance taskInstance)
{
GpioController gpioController = GpioController.GetDefault();
GpioPin dataLedPin = gpioController.OpenPin(13);
dataLedPin.SetDriveMode(GpioPinDriveMode.Output);
dataLedPin.Write(GpioPinValue.Low);
GpioPin linkLedPin = gpioController.OpenPin(6);
linkLedPin.SetDriveMode(GpioPinDriveMode.Output);
linkLedPin.Write(GpioPinValue.High);
while (true)
{
if (dataLedPin.Read() == GpioPinValue.High)
{
dataLedPin.Write(GpioPinValue.Low);
}
else
{
dataLedPin.Write(GpioPinValue.High);
}
if (linkLedPin.Read() == GpioPinValue.High)
{
linkLedPin.Write(GpioPinValue.Low);
}
else
{
linkLedPin.Write(GpioPinValue.High);
}
Thread.Sleep(500);
}
}
}
}
The two LEDs are labelled Data and Link but the pin numbers in the documentation were for an RPI Zero so didn’t match the ones I had to configure in code for my RPI3.
Overall the shield was professionally packaged and appears well engineered.