During the week another couple of Raspberry PI2/3/Zero shields arrived from uputronics. The two Raspberry PiZero LoRa(TM) Expansion Boards had arrived earlier so I unpacked them first. They were in small cardboard boxes with bolts+spacers and had a small set of printed instructions which was quite professional.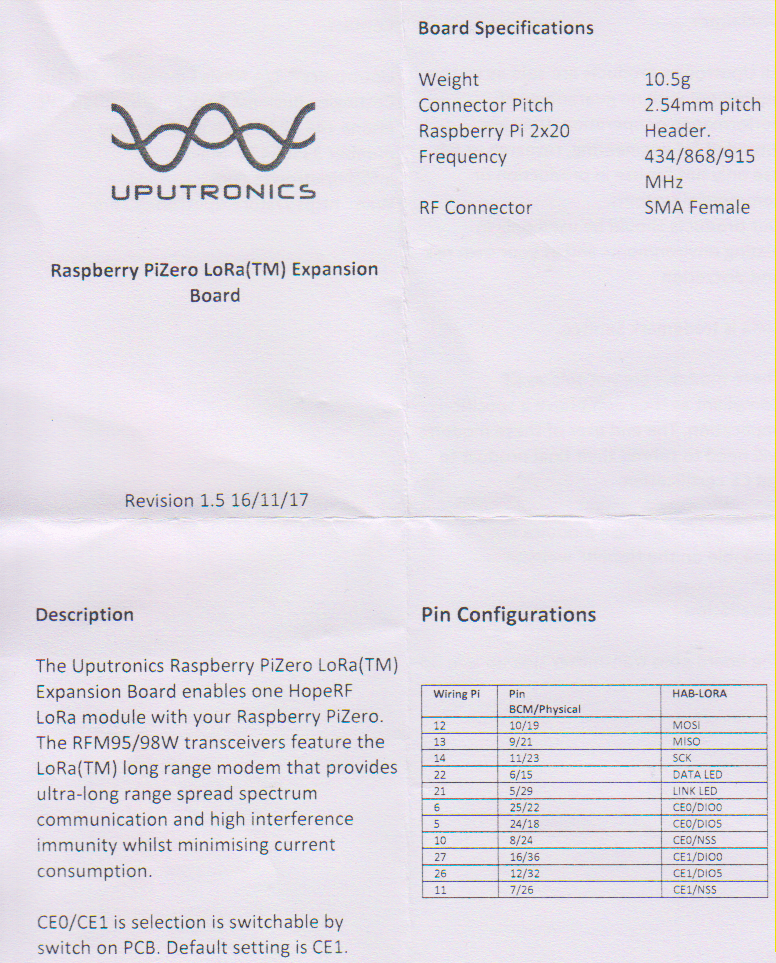
These shields also have a switch for configuring the chip select line which is quite a neat feature and means they can be stacked. Unlike the other shields I have tested these appear not to have the reset line of the RFM9X connected.

The first step was to get the SPI connectivity sorted
//---------------------------------------------------------------------------------
// Copyright (c) August 2018, devMobile Software
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
//
//---------------------------------------------------------------------------------
namespace devMobile.IoT.Rfm9x.UputronicsRPZeroSPI
{
using System;
using System.Diagnostics;
using System.Threading;
using Windows.ApplicationModel.Background;
using Windows.Devices.Spi;
public sealed class StartupTask : IBackgroundTask
{
public void Run(IBackgroundTaskInstance taskInstance)
{
#if CS0
const int chipSelectPinNumber = 0;
#endif
#if CS1
const int chipSelectPinNumber = 1;
#endif
SpiController spiController = SpiController.GetDefaultAsync().AsTask().GetAwaiter().GetResult();
var settings = new SpiConnectionSettings(chipSelectPinNumber)
{
ClockFrequency = 500000,
Mode = SpiMode.Mode0, // From SemTech docs pg 80 CPOL=0, CPHA=0
};
SpiDevice Device = spiController.GetDevice(settings);
while (true)
{
byte[] writeBuffer = new byte[] { 0x42 }; // RegVersion
byte[] readBuffer = new byte[1];
// Read the RegVersion silicon ID to check SPI works
Device.TransferSequential(writeBuffer, readBuffer);
Debug.WriteLine("Register RegVer 0x{0:x2} - Value 0X{1:x2} - Bits {2}", writeBuffer[0], readBuffer[0], Convert.ToString(readBuffer[0], 2).PadLeft(8, '0'));
Thread.Sleep(10000);
}
}
}
}
The output confirmed the code worked with both CS0 and CS1 defined
Register RegVer 0x42 - Value 0X12 - Bits 00010010 Register RegVer 0x42 - Value 0X12 - Bits 00010010 Register RegVer 0x42 - Value 0X12 - Bits 00010010 The program '[2144] backgroundTaskHost.exe' has exited with code -1 (0xffffffff).
The shield has two onboard Light Emitting Diodes (LEDs) so I wrote a simple test application to flash them alternately.
//---------------------------------------------------------------------------------
// Copyright (c) July 2018, devMobile Software
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
//
//---------------------------------------------------------------------------------
namespace devMobile.IoT.Rfm9x.UputronicsRPZeroLed
{
using System;
using System.Threading;
using Windows.ApplicationModel.Background;
using Windows.Devices.Gpio;
public sealed class StartupTask : IBackgroundTask
{
public void Run(IBackgroundTaskInstance taskInstance)
{
GpioController gpioController = GpioController.GetDefault();
GpioPin dataLedPin = gpioController.OpenPin(13);
dataLedPin.SetDriveMode(GpioPinDriveMode.Output);
dataLedPin.Write(GpioPinValue.Low);
GpioPin linkLedPin = gpioController.OpenPin(6);
linkLedPin.SetDriveMode(GpioPinDriveMode.Output);
linkLedPin.Write(GpioPinValue.High);
while (true)
{
if (dataLedPin.Read() == GpioPinValue.High)
{
dataLedPin.Write(GpioPinValue.Low);
}
else
{
dataLedPin.Write(GpioPinValue.High);
}
if (linkLedPin.Read() == GpioPinValue.High)
{
linkLedPin.Write(GpioPinValue.Low);
}
else
{
linkLedPin.Write(GpioPinValue.High);
}
Thread.Sleep(500);
}
}
}
}
The two LEDs are labelled Data and Link but the pin numbers in the documentation were for an RPI Zero so didn’t match the ones I had to configure in code for my RPI3.
Overall the shield was professionally packaged and appears well engineered.
