Random wanderings through Microsoft Azure esp. PaaS plumbing, the IoT bits, AI on Micro controllers, AI on Edge Devices, .NET nanoFramework, .NET Core on *nix and ML.NET+ONNX
namespace devMobile.IoT.SX127xLoRaDevice
{
using System;
using System.Text;
using System.Threading;
class Program
{
private const double Frequency = 915000000.0;
#if ESP32_WROOM_32_LORA_1_CHANNEL
private const int SpiBusId = 1;
#endif
#if NETDUINO3_WIFI
private const int SpiBusId = 2;
#endif
#if ST_STM32F769I_DISCOVERY
private const int SpiBusId = 2;
#endif
private static SX127XDevice sx127XDevice;
static void Main(string[] args)
{
int SendCount = 0;
#if ESP32_WROOM_32_LORA_1_CHANNEL // No reset line for this device as it isn't connected on SX127X
int chipSelectLine = Gpio.IO16;
int interruptPinNumber = Gpio.IO26;
#endif
#if NETDUINO3_WIFI
// Arduino D10->PB10
int chipSelectLine = PinNumber('B', 10);
// Arduino D9->PE5
int resetPinNumber = PinNumber('E', 5);
// Arduino D2 -PA3
int interruptPinNumber = PinNumber('A', 3);
#endif
#if ST_STM32F769I_DISCOVERY
// Arduino D10->PA11
int chipSelectLine = PinNumber('A', 11);
// Arduino D9->PH6
int resetPinNumber = PinNumber('H', 6);
// Arduino D2->PA4
int interruptPinNumber = PinNumber('J', 1);
#endif
Console.WriteLine("devMobile.IoT.SX127xLoRaDevice Client starting");
try
{
#if ESP32_WROOM_32_LORA_1_CHANNEL
Configuration.SetPinFunction(Gpio.IO12, DeviceFunction.SPI1_MISO);
Configuration.SetPinFunction(Gpio.IO13, DeviceFunction.SPI1_MOSI);
Configuration.SetPinFunction(Gpio.IO14, DeviceFunction.SPI1_CLOCK);
sx127XDevice = new SX127XDevice(SpiBusId, chipSelectLine, interruptPinNumber);
#endif
#if NETDUINO3_WIFI || ST_STM32F769I_DISCOVERY
sx127XDevice = new SX127XDevice(SpiBusId, chipSelectLine, interruptPinNumber, resetPinNumber);
#endif
sx127XDevice.Initialise(SX127XDevice.RegOpModeMode.ReceiveContinuous,
Frequency,
lnaGain: SX127XDevice.RegLnaLnaGain.G3,
lnaBoost:true,
powerAmplifier: SX127XDevice.PowerAmplifier.PABoost,
rxPayloadCrcOn: true,
rxDoneignoreIfCrcMissing: false
);
#if DEBUG
sx127XDevice.RegisterDump();
#endif
sx127XDevice.OnReceive += SX127XDevice_OnReceive;
sx127XDevice.Receive();
sx127XDevice.OnTransmit += SX127XDevice_OnTransmit;
Thread.Sleep(500);
while (true)
{
string messageText = $"Hello LoRa from .NET nanoFramework {SendCount += 1}!";
byte[] messageBytes = UTF8Encoding.UTF8.GetBytes(messageText);
//Console.WriteLine($"{DateTime.UtcNow:HH:mm:ss}-TX {messageBytes.Length} byte message {messageText}");
//sx127XDevice.Send(messageBytes);
Thread.Sleep(50000);
}
}
catch (Exception ex)
{
Console.WriteLine(ex.Message);
}
}
private static void SX127XDevice_OnReceive(object sender, SX127XDevice.OnDataReceivedEventArgs e)
{
try
{
// Remove unprintable characters from messages
for (int index = 0; index < e.Data.Length; index++)
{
if ((e.Data[index] < 0x20) || (e.Data[index] > 0x7E))
{
e.Data[index] = 0x7C;
}
}
string messageText = UTF8Encoding.UTF8.GetString(e.Data, 0, e.Data.Length);
Console.WriteLine($"{DateTime.UtcNow:HH:mm:ss}-RX PacketSnr {e.PacketSnr:0.0} Packet RSSI {e.PacketRssi}dBm RSSI {e.Rssi}dBm = {e.Data.Length} byte message {messageText}");
}
catch (Exception ex)
{
Console.WriteLine(ex.Message);
}
}
private static void SX127XDevice_OnTransmit(object sender, SX127XDevice.OnDataTransmitedEventArgs e)
{
sx127XDevice.SetMode(SX127XDevice.RegOpModeMode.ReceiveContinuous);
Console.WriteLine($"{DateTime.UtcNow:HH:mm:ss}-TX Done");
}
#if NETDUINO3_WIFI || ST_STM32F769I_DISCOVERY
static int PinNumber(char port, byte pin)
{
if (port < 'A' || port > 'J')
throw new ArgumentException();
return ((port - 'A') * 16) + pin;
}
#endif
}
}
The sample application shows how to configure the library for different devices (SPI port, interrupt pin and optional reset pin) then send/receive payloads. The library is intended to be initialised then run for long periods of time (I’m looking at a month long soak test next) rather than changing configuration while running. The initialise method has many parameters which have “reasonable” default values. (Posts coming about optimising power consumption and range).
The TransmitInterrupt application loads the message to be sent into the First In First Out(FIFO) buffer, RegDioMapping1 is set to interrupt onTxDone(PacketSent-00), then RegRegOpMode-Mode is set to Transmit. When the message has been sent InterruptGpioPin_ValueChanged is called, and the TxDone(0b00001000) flag is set in the RegIrqFlags register.
The ReceiveInterrupt application sets the RegDioMapping1 to interrupt on RxDone(PacketReady-00), then the RegRegOpMode-Mode is set to Receive(TX-101). When a message is received InterruptGpioPin_ValueChanged is called, with the RxDone(0b00001000) flag set in the RegIrqFlags register, and then the message is read from First In First Out(FIFO) buffer.
namespace devMobile.IoT.SX127x.ReceiveTransmitInterrupt
{
...
public sealed class SX127XDevice
{
...
public SX127XDevice(int busId, int chipSelectLine, int interruptPin, int resetPin)
{
var settings = new SpiConnectionSettings(busId, chipSelectLine)
{
ClockFrequency = 1000000,
Mode = SpiMode.Mode0,// From SemTech docs pg 80 CPOL=0, CPHA=0
SharingMode = SpiSharingMode.Shared
};
SX127XTransceiver = new SpiDevice(settings);
GpioController gpioController = new GpioController();
// Factory reset pin configuration
gpioController.OpenPin(resetPin, PinMode.Output);
gpioController.Write(resetPin, PinValue.Low);
Thread.Sleep(20);
gpioController.Write(resetPin, PinValue.High);
Thread.Sleep(20);
// Interrupt pin for RX message & TX done notification
gpioController.OpenPin(interruptPin, PinMode.InputPullDown);
gpioController.RegisterCallbackForPinValueChangedEvent(interruptPin, PinEventTypes.Rising, InterruptGpioPin_ValueChanged);
}
...
}
private void InterruptGpioPin_ValueChanged(object sender, PinValueChangedEventArgs e)
{
byte irqFlags = this.ReadByte(0x12); // RegIrqFlags
Debug.WriteLine($"RegIrqFlags 0X{irqFlags:x2}");
if ((irqFlags & 0b01000000) == 0b01000000) // RxDone
{
Debug.WriteLine("Receive-Message");
byte currentFifoAddress = this.ReadByte(0x10); // RegFifiRxCurrent
this.WriteByte(0x0d, currentFifoAddress); // RegFifoAddrPtr
byte numberOfBytes = this.ReadByte(0x13); // RegRxNbBytes
// Allocate buffer for message
byte[] messageBytes = this.ReadBytes(0X0, numberOfBytes);
// Remove unprintable characters from messages
for (int index = 0; index < messageBytes.Length; index++)
{
if ((messageBytes[index] < 0x20) || (messageBytes[index] > 0x7E))
{
messageBytes[index] = 0x20;
}
}
string messageText = UTF8Encoding.UTF8.GetString(messageBytes, 0, messageBytes.Length);
Debug.WriteLine($"Received {messageBytes.Length} byte message {messageText}");
}
if ((irqFlags & 0b00001000) == 0b00001000) // TxDone
{
this.WriteByte(0x01, 0b10000101); // RegOpMode set LoRa & RxContinuous
Debug.WriteLine("Transmit-Done");
}
this.WriteByte(0x40, 0b00000000); // RegDioMapping1 0b00000000 DI0 RxReady & TxReady
this.WriteByte(0x12, 0xff);// RegIrqFlags
}
public class Program
{
...
#if NETDUINO3_WIFI
private const int SpiBusId = 2;
#endif
...
public static void Main()
{
int SendCount = 0;
...
#if NETDUINO3_WIFI
// Arduino D10->PB10
int chipSelectLine = PinNumber('B', 10);
// Arduino D9->PE5
int resetPinNumber = PinNumber('E', 5);
// Arduino D2 -PA3
int interruptPinNumber = PinNumber('A', 3);
#endif
...
Debug.WriteLine("devMobile.IoT.SX127x.ReceiveTransmitInterrupt starting");
try
{
...
#if NETDUINO3_WIFI || ST_STM32F769I_DISCOVERY
SX127XDevice sx127XDevice = new SX127XDevice(SpiBusId, chipSelectLine, interruptPinNumber, resetPinNumber);
#endif
Thread.Sleep(500);
// Put device into LoRa + Sleep mode
sx127XDevice.WriteByte(0x01, 0b10000000); // RegOpMode
// Set the frequency to 915MHz
byte[] frequencyWriteBytes = { 0xE4, 0xC0, 0x00 }; // RegFrMsb, RegFrMid, RegFrLsb
sx127XDevice.WriteBytes(0x06, frequencyWriteBytes);
// More power PA Boost
sx127XDevice.WriteByte(0x09, 0b10000000); // RegPaConfig
sx127XDevice.WriteByte(0x01, 0b10000101); // RegOpMode set LoRa & RxContinuous
while (true)
{
// Set the Register Fifo address pointer
sx127XDevice.WriteByte(0x0E, 0x00); // RegFifoTxBaseAddress
// Set the Register Fifo address pointer
sx127XDevice.WriteByte(0x0D, 0x0); // RegFifoAddrPtr
string messageText = $"Hello LoRa {SendCount += 1}!";
// load the message into the fifo
byte[] messageBytes = UTF8Encoding.UTF8.GetBytes(messageText);
sx127XDevice.WriteBytes(0x0, messageBytes); // RegFifo
// Set the length of the message in the fifo
sx127XDevice.WriteByte(0x22, (byte)messageBytes.Length); // RegPayloadLength
sx127XDevice.WriteByte(0x40, 0b01000000); // RegDioMapping1 0b00000000 DI0 RxReady & TxReady
sx127XDevice.WriteByte(0x01, 0b10000011); // RegOpMode
Debug.WriteLine($"Sending {messageBytes.Length} bytes message {messageText}");
Thread.Sleep(10000);
}
}
catch (Exception ex)
{
Debug.WriteLine(ex.Message);
}
}
...
}
}
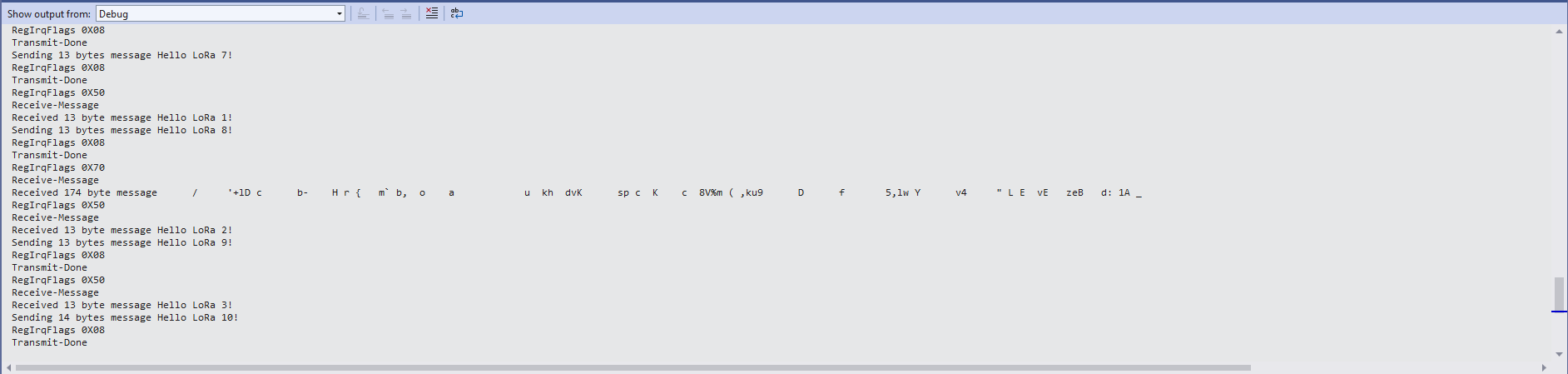
ReceiveTransmitInterrupt application output
The ReceiveTransmitInterrupt application combines the functionality TransmitInterrupt and ReceiveInterrupt programs. The key differences are the RegDioMapping1 setup and in InterruptGpioPin_ValueChanged where the TxDone & RxDone flags in the RegIrqFlags register specify how the interrupt is handled.
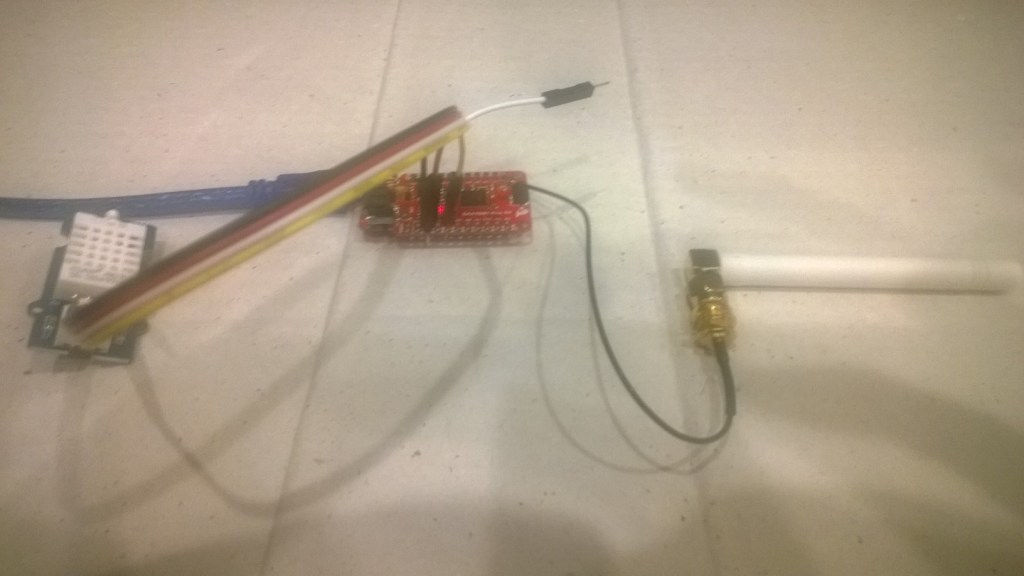
For testing nanoFramework device transmit and receive functionality I used an Arduino/Seeeduino with a Dragino LoRa Shield (running one of the Arduino-LoRa samples) as a client device. This was so I could “bootstrap” connectivity and test interoperability with other libraries/platforms.
Arduino/Netduino devices for .NET nanoFramework interoperability test-rig
I started with transmit as I was confident my Seeeduino + Dragino LoRa Shield could receive messages. The TransmitBasic application puts the device into LoRa + Sleep mode as after reset/powering up the device is in FSK/OOK, Low Frequency + Standby mode).
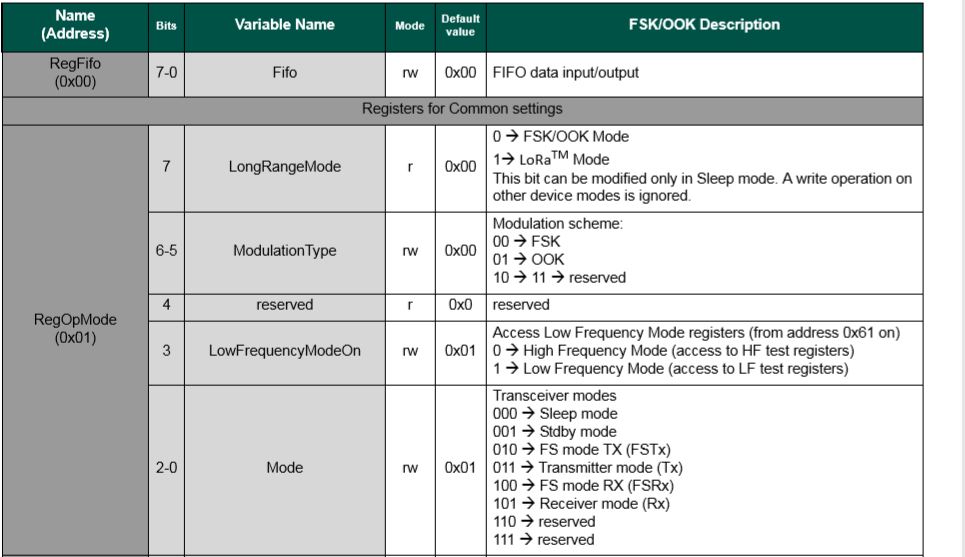
SX127X RegOpMode options
After loading the message to be sent into the First In First Out(FIFO) buffer, the RegOpMode-Mode is set to Transmit(TX-011), and then the RegIrqFlags register is polled until the TxDone flag is set.
SX127X ReqIrqFlags options
public static void Main()
{
int SendCount = 0;
...
Debug.WriteLine("devMobile.IoT.SX127x.TransmitBasic starting");
try
{
...
#if NETDUINO3_WIFI || ST_STM32F769I_DISCOVERY
SX127XDevice sx127XDevice = new SX127XDevice(SpiBusId, chipSelectLine, resetPinNumber);
#endif
Thread.Sleep(500);
// Put device into LoRa + Standby mode
sx127XDevice.WriteByte(0x01, 0b10000000); // RegOpMode
// Set the frequency to 915MHz
byte[] frequencyBytes = { 0xE4, 0xC0, 0x00 }; // RegFrMsb, RegFrMid, RegFrLsb
sx127XDevice.WriteBytes(0x06, frequencyBytes);
// More power PA Boost
sx127XDevice.WriteByte(0x09, 0b10000000); // RegPaConfig
sx127XDevice.RegisterDump();
while (true)
{
sx127XDevice.WriteByte(0x0E, 0x0); // RegFifoTxBaseAddress
// Set the Register Fifo address pointer
sx127XDevice.WriteByte(0x0D, 0x0); // RegFifoAddrPtr
string messageText = $"Hello LoRa from .NET nanoFramework {SendCount += 1}!";
// load the message into the fifo
byte[] messageBytes = UTF8Encoding.UTF8.GetBytes(messageText);
sx127XDevice.WriteBytes(0x0, messageBytes); // RegFifo
// Set the length of the message in the fifo
sx127XDevice.WriteByte(0x22, (byte)messageBytes.Length); // RegPayloadLength
Debug.WriteLine($"Sending {messageBytes.Length} bytes message {messageText}");
// Set the mode to LoRa + Transmit
sx127XDevice.WriteByte(0x01, 0b10000011); // RegOpMode
// Wait until send done, no timeouts in PoC
Debug.WriteLine("Send-wait");
byte irqFlags = sx127XDevice.ReadByte(0x12); // RegIrqFlags
while ((irqFlags & 0b00001000) == 0) // wait until TxDone cleared
{
Thread.Sleep(10);
irqFlags = sx127XDevice.ReadByte(0x12); // RegIrqFlags
Debug.Write(".");
}
Debug.WriteLine("");
sx127XDevice.WriteByte(0x12, 0b00001000); // clear TxDone bit
Debug.WriteLine("Send-Done");
Thread.Sleep(30000);
}
}
catch (Exception ex)
{
Debug.WriteLine(ex.Message);
}
}
}
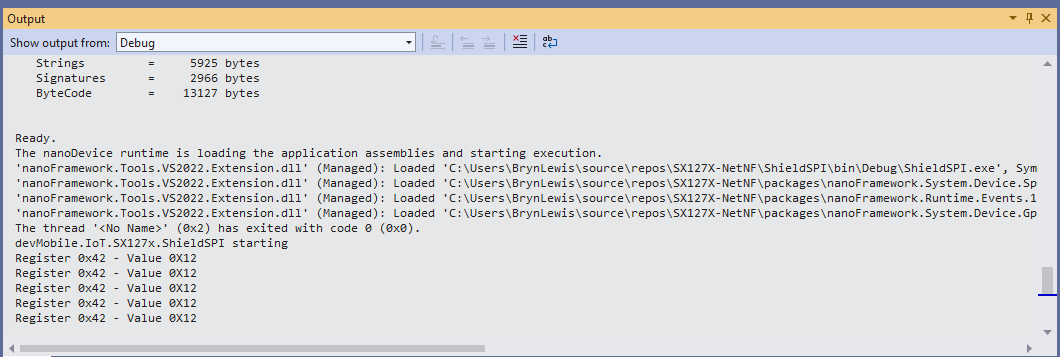
Transmit Basic application output
Once the TransmitBasic application was sending messages reliably I started working on the ReceiveBasic application. As the ReceiveBasic application starts up the SX127X RegOpMode has to be set to sleep/standby so the device can be configured. TOnce that is completed RegOpMode-Mode is set to RxContinuous(101), and the RegIrqFlags register is polled until the RxDone flag is set.
public static void Main()
{
...
Debug.WriteLine("devMobile.IoT.SX127x.ReceiveBasic starting");
try
{
...
#if NETDUINO3_WIFI || ST_STM32F769I_DISCOVERY
SX127XDevice sx127XDevice = new SX127XDevice(SpiBusId, chipSelectLine, resetPinNumber);
#endif
Thread.Sleep(500);
// Put device into LoRa + Sleep mode
sx127XDevice.WriteByte(0x01, 0b10000000); // RegOpMode
// Set the frequency to 915MHz
byte[] frequencyBytes = { 0xE4, 0xC0, 0x00 }; // RegFrMsb, RegFrMid, RegFrLsb
sx127XDevice.WriteBytes(0x06, frequencyBytes);
sx127XDevice.WriteByte(0x0F, 0x0); // RegFifoRxBaseAddress
sx127XDevice.WriteByte(0x01, 0b10000101); // RegOpMode set LoRa & RxContinuous
while (true)
{
// Wait until a packet is received, no timeouts in PoC
Debug.WriteLine("Receive-Wait");
byte irqFlags = sx127XDevice.ReadByte(0x12); // RegIrqFlags
while ((irqFlags & 0b01000000) == 0) // wait until RxDone cleared
{
Thread.Sleep(100);
irqFlags = sx127XDevice.ReadByte(0x12); // RegIrqFlags
Debug.Write(".");
}
Debug.WriteLine("");
Debug.WriteLine($"RegIrqFlags 0X{irqFlags:X2}");
Debug.WriteLine("Receive-Message");
byte currentFifoAddress = sx127XDevice.ReadByte(0x10); // RegFifiRxCurrent
sx127XDevice.WriteByte(0x0d, currentFifoAddress); // RegFifoAddrPtr
byte numberOfBytes = sx127XDevice.ReadByte(0x13); // RegRxNbBytes
// Read the message from the FIFO
byte[] messageBytes = sx127XDevice.ReadBytes(0x00, numberOfBytes);
sx127XDevice.WriteByte(0x0d, 0);
sx127XDevice.WriteByte(0x12, 0b11111111); // RegIrqFlags clear all the bits
// Remove unprintable characters from messages
for (int index = 0; index < messageBytes.Length; index++)
{
if ((messageBytes[index] < 0x20) || (messageBytes[index] > 0x7E))
{
messageBytes[index] = 0x20;
}
}
string messageText = UTF8Encoding.UTF8.GetString(messageBytes, 0, messageBytes.Length);
Debug.WriteLine($"Received {messageBytes.Length} byte message {messageText}");
Debug.WriteLine("Receive-Done");
}
}
catch (Exception ex)
{
Debug.WriteLine(ex.Message);
}
}
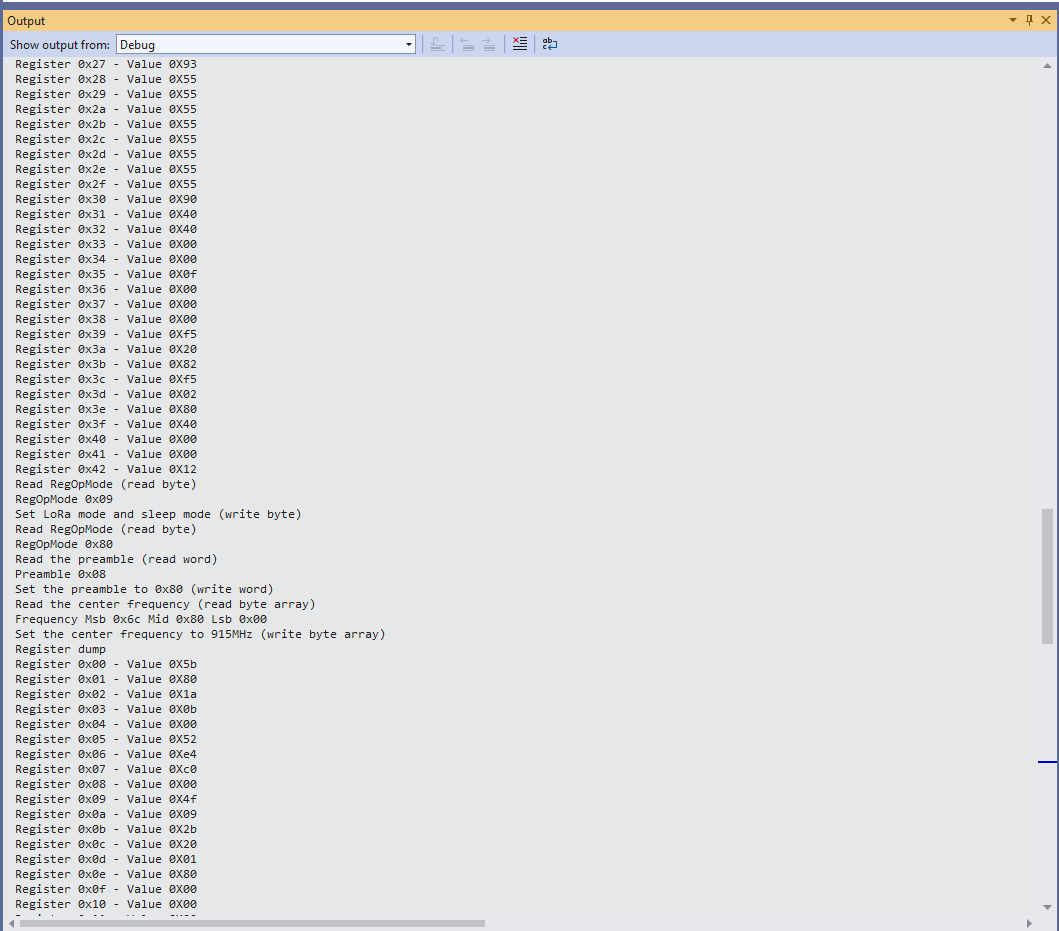
Receive Basic application output
Every so often the ReceiveBasic application would display a message sent on the same frequency by a device somewhere nearby.
ReceiveBasic application messages from unknown source
I need to do some more investigation into whether writing 0b00001000 (Transmit) vs. 0b11111111(Receive) to RegIrqFlags is important.
Now that I could reliably dump all the Dragino shield registers I wanted to be able to configure the Semtech 127X device and reset it back to factory settings. A factory reset is done by strobing the SX127X reset pin.
SX127X Reset timing diagram
SX127X Reset process
To support this I added a constructor with an additional parameter for the reset General Purpose Input Output(GPIO) pin number to the SX127XDevice class. The original constructor was retained as the SX127X reset pin is not connected on the SparkFun LoRa Gateway-1-Channel (ESP32) and a limited number of other devices.
namespace devMobile.IoT.SX127x.RegisterReadAndWrite
{
using System;
using System.Diagnostics;
using System.Threading;
using System.Device.Gpio;
using System.Device.Spi;
#if ESP32_WROOM_32_LORA_1_CHANNEL
using nanoFramework.Hardware.Esp32;
#endif
public sealed class SX127XDevice
{
private const byte RegisterAddressMinimum = 0X0;
private const byte RegisterAddressMaximum = 0x42;
private const byte RegisterAddressReadMask = 0X7f;
private const byte RegisterAddressWriteMask = 0x80;
private readonly SpiDevice SX127XTransceiver;
public SX127XDevice(int busId, int chipSelectLine, int resetPin)
{
var settings = new SpiConnectionSettings(busId, chipSelectLine)
{
ClockFrequency = 1000000,
Mode = SpiMode.Mode0,// From SemTech docs pg 80 CPOL=0, CPHA=0
SharingMode = SpiSharingMode.Shared
};
SX127XTransceiver = new SpiDevice(settings);
// Factory reset pin configuration
GpioController gpioController = new GpioController();
gpioController.OpenPin(resetPin, PinMode.Output);
gpioController.Write(resetPin, PinValue.Low);
Thread.Sleep(20);
gpioController.Write(resetPin, PinValue.High);
Thread.Sleep(20);
}
public SX127XDevice(int busId, int chipSelectLine)
{
var settings = new SpiConnectionSettings(busId, chipSelectLine)
{
ClockFrequency = 1000000,
Mode = SpiMode.Mode0,// From SemTech docs pg 80 CPOL=0, CPHA=0
SharingMode = SpiSharingMode.Shared,
};
SX127XTransceiver = new SpiDevice(settings);
}
public Byte ReadByte(byte registerAddress)
{
byte[] writeBuffer = new byte[] { registerAddress &= RegisterAddressReadMask, 0x0 };
byte[] readBuffer = new byte[writeBuffer.Length];
SX127XTransceiver.TransferFullDuplex(writeBuffer, readBuffer);
return readBuffer[1];
}
public ushort ReadWord(byte address)
{
byte[] writeBuffer = new byte[] { address &= RegisterAddressReadMask, 0x0, 0x0 };
byte[] readBuffer = new byte[writeBuffer.Length];
SX127XTransceiver.TransferFullDuplex(writeBuffer, readBuffer);
return (ushort)(readBuffer[2] + (readBuffer[1] << 8));
}
public ushort ReadWordMsbLsb(byte address)
{
byte[] writeBuffer = new byte[] { address &= RegisterAddressReadMask, 0x0, 0x0 };
byte[] readBuffer = new byte[writeBuffer.Length];
SX127XTransceiver.TransferFullDuplex(writeBuffer, readBuffer);
return (ushort)((readBuffer[1] << 8) + readBuffer[2]);
}
public byte[] ReadBytes(byte address, byte length)
{
byte[] writeBuffer = new byte[length + 1];
byte[] readBuffer = new byte[writeBuffer.Length];
byte[] replyBuffer = new byte[length];
writeBuffer[0] = address &= RegisterAddressReadMask;
SX127XTransceiver.TransferFullDuplex(writeBuffer, readBuffer);
Array.Copy(readBuffer, 1, replyBuffer, 0, length);
return replyBuffer;
}
public void WriteByte(byte address, byte value)
{
byte[] writeBuffer = new byte[] { address |= RegisterAddressWriteMask, value };
byte[] readBuffer = new byte[writeBuffer.Length];
SX127XTransceiver.TransferFullDuplex(writeBuffer, readBuffer);
}
public void WriteWord(byte address, ushort value)
{
byte[] valueBytes = BitConverter.GetBytes(value);
byte[] writeBuffer = new byte[] { address |= RegisterAddressWriteMask, valueBytes[0], valueBytes[1] };
byte[] readBuffer = new byte[writeBuffer.Length];
SX127XTransceiver.TransferFullDuplex(writeBuffer, readBuffer);
}
public void WriteWordMsbLsb(byte address, ushort value)
{
byte[] valueBytes = BitConverter.GetBytes(value);
byte[] writeBuffer = new byte[] { address |= RegisterAddressWriteMask, valueBytes[1], valueBytes[0] };
byte[] readBuffer = new byte[writeBuffer.Length];
SX127XTransceiver.TransferFullDuplex(writeBuffer, readBuffer);
}
public void WriteBytes(byte address, byte[] bytes)
{
byte[] writeBuffer = new byte[1 + bytes.Length];
byte[] readBuffer = new byte[writeBuffer.Length];
Array.Copy(bytes, 0, writeBuffer, 1, bytes.Length);
writeBuffer[0] = address |= RegisterAddressWriteMask;
SX127XTransceiver.TransferFullDuplex(writeBuffer, readBuffer);
}
public void RegisterDump()
{
Debug.WriteLine("Register dump");
for (byte registerIndex = RegisterAddressMinimum; registerIndex <= RegisterAddressMaximum; registerIndex++)
{
byte registerValue = this.ReadByte(registerIndex);
Debug.WriteLine($"Register 0x{registerIndex:x2} - Value 0X{registerValue:x2}");
}
Debug.WriteLine("");
}
}
public class Program
{
#if ESP32_WROOM_32_LORA_1_CHANNEL
private const int SpiBusId = 1;
#endif
#if NETDUINO3_WIFI
private const int SpiBusId = 2;
#endif
#if ST_STM32F769I_DISCOVERY
private const int SpiBusId = 2;
#endif
public static void Main()
{
byte[] frequencyBytes;
#if ESP32_WROOM_32_LORA_1_CHANNEL // No reset line for this device as it isn't connected on SX127X
int chipSelectLine = Gpio.IO16;
#endif
#if NETDUINO3_WIFI
// Arduino D10->PB10
int chipSelectLine = PinNumber('B', 10);
// Arduino D9->PE5
int resetPinNumber = PinNumber('E', 5);
#endif
#if ST_STM32F769I_DISCOVERY
// Arduino D10->PA11
int chipSelectLine = PinNumber('A', 11);
// Arduino D9->PH6
int resetPinNumber = PinNumber('H', 6);
#endif
Debug.WriteLine("devMobile.IoT.SX127x.RegisterReadAndWrite starting");
try
{
#if ESP32_WROOM_32_LORA_1_CHANNEL
Configuration.SetPinFunction(Gpio.IO12, DeviceFunction.SPI1_MISO);
Configuration.SetPinFunction(Gpio.IO13, DeviceFunction.SPI1_MOSI);
Configuration.SetPinFunction(Gpio.IO14, DeviceFunction.SPI1_CLOCK);
SX127XDevice sx127XDevice = new SX127XDevice(SpiBusId, chipSelectLine);
#endif
#if NETDUINO3_WIFI || ST_STM32F769I_DISCOVERY
SX127XDevice sx127XDevice = new SX127XDevice(SpiBusId, chipSelectLine, resetPinNumber);
#endif
Thread.Sleep(500);
sx127XDevice.RegisterDump();
while (true)
{
Debug.WriteLine("Read RegOpMode (read byte)");
Byte regOpMode1 = sx127XDevice.ReadByte(0x1);
Debug.WriteLine($"RegOpMode 0x{regOpMode1:x2}");
Debug.WriteLine("Set LoRa mode and sleep mode (write byte)");
sx127XDevice.WriteByte(0x01, 0b10000000);
Debug.WriteLine("Read RegOpMode (read byte)");
Byte regOpMode2 = sx127XDevice.ReadByte(0x1);
Debug.WriteLine($"RegOpMode 0x{regOpMode2:x2}");
Debug.WriteLine("Read the preamble (read word)");
ushort preamble = sx127XDevice.ReadWord(0x20);
Debug.WriteLine($"Preamble 0x{preamble:x2}");
Console.WriteLine("Read the preamble (read word)"); // Should be 0x08
preamble = sx127XDevice.ReadWordMsbLsb(0x20);
Debug.WriteLine($"Preamble 0x{preamble:x2}");
Debug.WriteLine("Read the centre frequency (read byte array)");
frequencyBytes = sx127XDevice.ReadBytes(0x06, 3);
Debug.WriteLine($"Frequency Msb 0x{frequencyBytes[0]:x2} Mid 0x{frequencyBytes[1]:x2} Lsb 0x{frequencyBytes[2]:x2}");
Debug.WriteLine("Set the centre frequency to 915MHz (write byte array)");
byte[] frequencyWriteBytes = { 0xE4, 0xC0, 0x00 };
sx127XDevice.WriteBytes(0x06, frequencyWriteBytes);
Debug.WriteLine("Read the centre frequency (read byte array)");
frequencyBytes = sx127XDevice.ReadBytes(0x06, 3);
Debug.WriteLine($"Frequency Msb 0x{frequencyBytes[0]:x2} Mid 0x{frequencyBytes[1]:x2} Lsb 0x{frequencyBytes[2]:x2}");
sx127XDevice.RegisterDump();
Thread.Sleep(30000);
}
}
catch (Exception ex)
{
Debug.WriteLine(ex.Message);
}
}
#if NETDUINO3_WIFI || ST_STM32F769I_DISCOVERY
static int PinNumber(char port, byte pin)
{
if (port < 'A' || port > 'J')
throw new ArgumentException();
return ((port - 'A') * 16) + pin;
}
#endif
}
}
The PinNumber helper is more user friendly that the raw numbers and is “inspired” by sample .NET nanoFramework General Purpose Input Output(GPIO) sample code.
Each method was tested by read/writing suitable register(s) in the device configuration (Needed to set it into LoRa mode first).
The next step is to extract the Serial Peripheral Interface(SPI) register access functionality into a module and configure the bare minimum of settings required to get the SX127X to receive and transmit messages.
All this madness started because I wasn’t confident the frequency calculation of the Emmellsoft Dragino.Lora code was correct. Over the last couple of years I have also found bugs in my Transmit Power, InvertIQ RX/TX with many others yet to be discovered.
This code implements the reception of messages builds on my transmit basic sample. I had to add a simple for loop to replace un-printable characters in the received message with spaces as nanoFrameworkUTF8Encoding.UTF8.GetString was throwing exceptions.
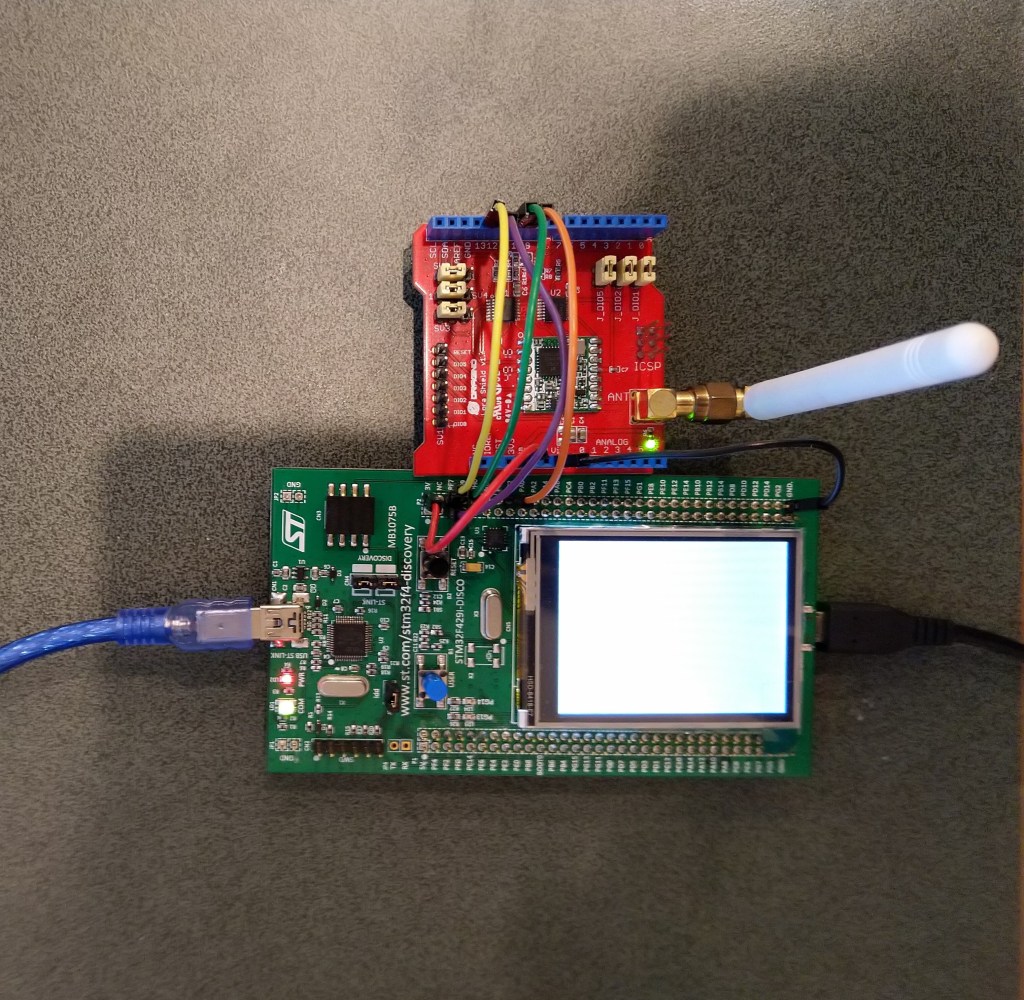
STM32F429 Discovery+ Dragino LoRa shield with Armtronix device
The code now works on STM32F429 Discovery and ESP32 WROOM platforms. (manual update nanoFramework.Hardware.Esp32 NuGet reference required)
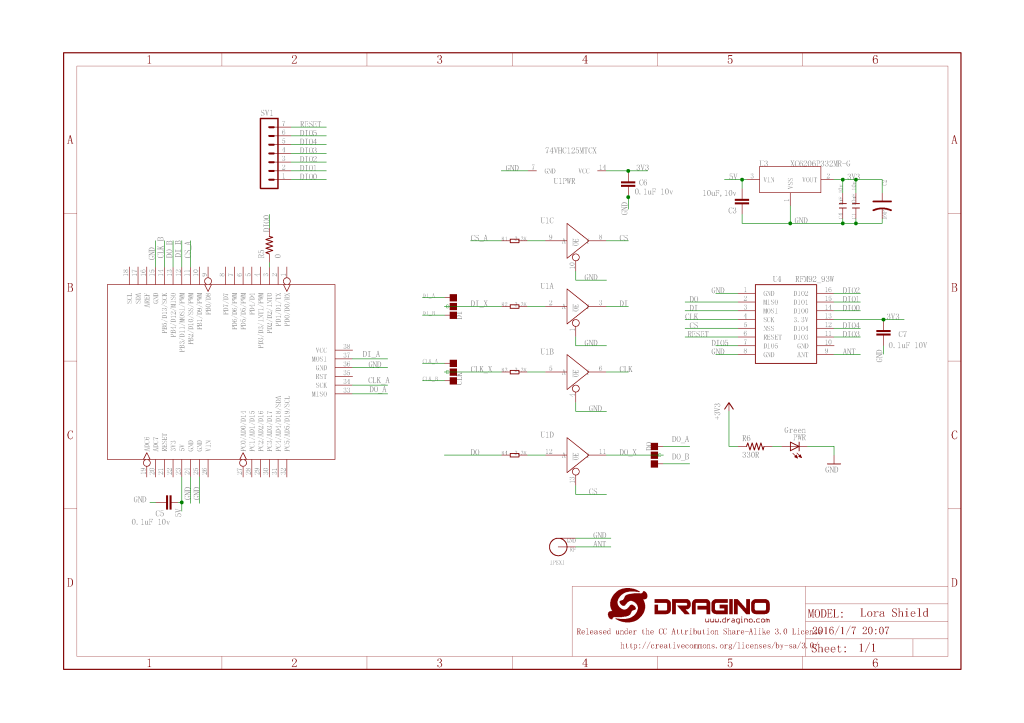
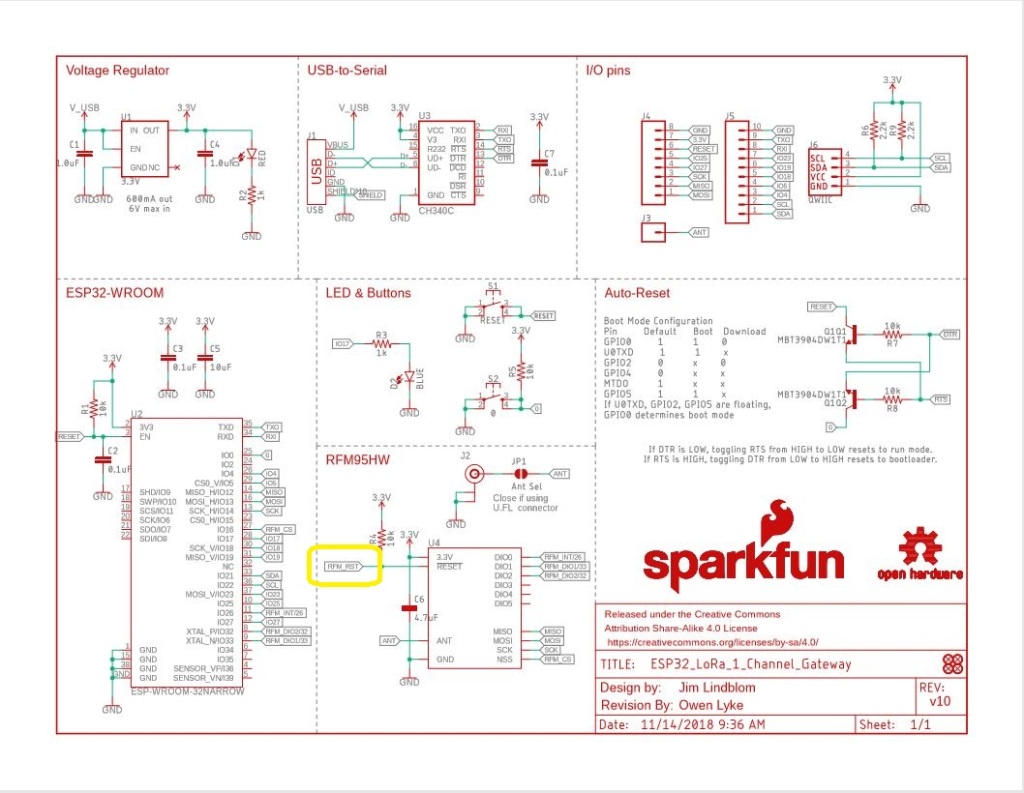
Sparkfun LoRa Gateway 1 Channel schematic
One disadvantage of the SparkFun device is that the reset pin on the SX127X doesn’t appear to be connected to the ESP32 so I can’t factory reset the device in code.
//#define ST_STM32F429I_DISCOVERY //nanoff --target ST_STM32F429I_DISCOVERY --update
#define ESP32_WROOM_32_LORA_1_CHANNEL //nanoff --target ESP32_WROOM_32 --serialport COM4 --update
namespace devMobile.IoT.Rfm9x.TransmitBasic
{
using System;
using System.Text;
using System.Threading;
using Windows.Devices.Gpio;
using Windows.Devices.Spi;
#if ESP32_WROOM_32_LORA_1_CHANNEL
using nanoFramework.Hardware.Esp32;
#endif
public sealed class Rfm9XDevice
{
private SpiDevice rfm9XLoraModem;
private const byte RegisterAddressReadMask = 0X7f;
private const byte RegisterAddressWriteMask = 0x80;
public Rfm9XDevice(string spiPort, int chipSelectPin, int resetPin)
{
var settings = new SpiConnectionSettings(chipSelectPin)
{
ClockFrequency = 1000000,
//DataBitLength = 8,
Mode = SpiMode.Mode0,// From SemTech docs pg 80 CPOL=0, CPHA=0
SharingMode = SpiSharingMode.Shared,
};
rfm9XLoraModem = SpiDevice.FromId(spiPort, settings);
// Factory reset pin configuration
GpioController gpioController = GpioController.GetDefault();
GpioPin resetGpioPin = gpioController.OpenPin(resetPin);
resetGpioPin.SetDriveMode(GpioPinDriveMode.Output);
resetGpioPin.Write(GpioPinValue.Low);
Thread.Sleep(10);
resetGpioPin.Write(GpioPinValue.High);
Thread.Sleep(10);
}
public Rfm9XDevice(string spiPort, int chipSelectPin)
{
var settings = new SpiConnectionSettings(chipSelectPin)
{
ClockFrequency = 1000000,
Mode = SpiMode.Mode0,// From SemTech docs pg 80 CPOL=0, CPHA=0
SharingMode = SpiSharingMode.Shared,
};
rfm9XLoraModem = SpiDevice.FromId(spiPort, settings);
}
public Byte RegisterReadByte(byte registerAddress)
{
byte[] writeBuffer = new byte[] { registerAddress &= RegisterAddressReadMask, 0x0 };
byte[] readBuffer = new byte[writeBuffer.Length];
rfm9XLoraModem.TransferFullDuplex(writeBuffer, readBuffer);
return readBuffer[1];
}
public ushort RegisterReadWord(byte address)
{
byte[] writeBuffer = new byte[] { address &= RegisterAddressReadMask, 0x0, 0x0 };
byte[] readBuffer = new byte[writeBuffer.Length];
rfm9XLoraModem.TransferFullDuplex(writeBuffer, readBuffer);
return (ushort)(readBuffer[2] + (readBuffer[1] << 8));
}
public byte[] RegisterRead(byte address, int length)
{
byte[] writeBuffer = new byte[length + 1];
byte[] readBuffer = new byte[writeBuffer.Length];
byte[] repyBuffer = new byte[length];
writeBuffer[0] = address &= RegisterAddressReadMask;
rfm9XLoraModem.TransferFullDuplex(writeBuffer, readBuffer);
Array.Copy(readBuffer, 1, repyBuffer, 0, length);
return repyBuffer;
}
public void RegisterWriteByte(byte address, byte value)
{
byte[] writeBuffer = new byte[] { address |= RegisterAddressWriteMask, value };
byte[] readBuffer = new byte[writeBuffer.Length];
rfm9XLoraModem.TransferFullDuplex(writeBuffer, readBuffer);
}
public void RegisterWriteWord(byte address, ushort value)
{
byte[] valueBytes = BitConverter.GetBytes(value);
byte[] writeBuffer = new byte[] { address |= RegisterAddressWriteMask, valueBytes[0], valueBytes[1] };
byte[] readBuffer = new byte[writeBuffer.Length];
rfm9XLoraModem.TransferFullDuplex(writeBuffer,readBuffer);
}
public void RegisterWrite(byte address, byte[] bytes)
{
byte[] writeBuffer = new byte[1 + bytes.Length];
byte[] readBuffer = new byte[writeBuffer.Length];
Array.Copy(bytes, 0, writeBuffer, 1, bytes.Length);
writeBuffer[0] = address |= RegisterAddressWriteMask;
rfm9XLoraModem.TransferFullDuplex(writeBuffer, readBuffer);
}
public void RegisterDump()
{
Console.WriteLine("Register dump");
for (byte registerIndex = 0; registerIndex <= 0x42; registerIndex++)
{
byte registerValue = this.RegisterReadByte(registerIndex);
Console.WriteLine($"Register 0x{registerIndex:x2} - Value 0X{registerValue:x2}");
}
}
}
class Program
{
#if ST_STM32F429I_DISCOVERY
private const string SpiBusId = "SPI5";
#endif
#if ESP32_WROOM_32_LORA_1_CHANNEL
private const string SpiBusId = "SPI1";
#endif
static void Main()
{
int SendCount = 0;
#if ST_STM32F429I_DISCOVERY
int chipSelectPinNumber = PinNumber('C', 2);
int resetPinNumber = PinNumber('C', 3);
#endif
#if ESP32_WROOM_32_LORA_1_CHANNEL
int chipSelectPinNumber = Gpio.IO16;
#endif
try
{
#if ESP32_WROOM_32_LORA_1_CHANNEL
Configuration.SetPinFunction(Gpio.IO12, DeviceFunction.SPI1_MISO);
Configuration.SetPinFunction(Gpio.IO13, DeviceFunction.SPI1_MOSI);
Configuration.SetPinFunction(Gpio.IO14, DeviceFunction.SPI1_CLOCK);
Rfm9XDevice rfm9XDevice = new Rfm9XDevice(SpiBusId, chipSelectPinNumber);
#endif
#if ST_STM32F429I_DISCOVERY
Rfm9XDevice rfm9XDevice = new Rfm9XDevice(SpiBusId, chipSelectPinNumber, resetPinNumber);
#endif
Thread.Sleep(500);
// Put device into LoRa + Standby mode
rfm9XDevice.RegisterWriteByte(0x01, 0b10000001); // RegOpMode
// Set the frequency to 915MHz
byte[] frequencyWriteBytes = { 0xE4, 0xC0, 0x00 }; // RegFrMsb, RegFrMid, RegFrLsb
rfm9XDevice.RegisterWrite(0x06, frequencyWriteBytes);
// More power PA Boost
rfm9XDevice.RegisterWriteByte(0x09, 0b10000000); // RegPaConfig
rfm9XDevice.RegisterDump();
while (true)
{
rfm9XDevice.RegisterWriteByte(0x0E, 0x0); // RegFifoTxBaseAddress
// Set the Register Fifo address pointer
rfm9XDevice.RegisterWriteByte(0x0D, 0x0); // RegFifoAddrPtr
string messageText = $"Hello LoRa {SendCount += 1}!";
// load the message into the fifo
byte[] messageBytes = UTF8Encoding.UTF8.GetBytes(messageText);
rfm9XDevice.RegisterWrite(0x0, messageBytes); // RegFifo
// Set the length of the message in the fifo
rfm9XDevice.RegisterWriteByte(0x22, (byte)messageBytes.Length); // RegPayloadLength
Console.WriteLine($"Sending {messageBytes.Length} bytes message {messageText}");
/// Set the mode to LoRa + Transmit
rfm9XDevice.RegisterWriteByte(0x01, 0b10000011); // RegOpMode
// Wait until send done, no timeouts in PoC
Console.WriteLine("Send-wait");
byte IrqFlags = rfm9XDevice.RegisterReadByte(0x12); // RegIrqFlags
while ((IrqFlags & 0b00001000) == 0) // wait until TxDone cleared
{
Thread.Sleep(10);
IrqFlags = rfm9XDevice.RegisterReadByte(0x12); // RegIrqFlags
Console.WriteLine(".");
}
Console.WriteLine("");
rfm9XDevice.RegisterWriteByte(0x12, 0b00001000); // clear TxDone bit
Console.WriteLine("Send-Done");
Thread.Sleep(10000);
}
}
catch (Exception ex)
{
Console.WriteLine(ex.Message);
}
}
#if ST_STM32F429I_DISCOVERY
static int PinNumber(char port, byte pin)
{
if (port < 'A' || port > 'J')
throw new ArgumentException();
return ((port - 'A') * 16) + pin;
}
#endif
}
}
When I initially ran the application in Visual Studio 2019 the text below was displayed in the output window.
Register dump
Register 0x00 - Value 0X00
Register 0x01 - Value 0X80
Register 0x02 - Value 0X1A
Register 0x03 - Value 0X0B
Register 0x04 - Value 0X00
…
Register 0x3E - Value 0X00
Register 0x3F - Value 0X00
Register 0x40 - Value 0X00
Register 0x41 - Value 0X00
Register 0x42 - Value 0X12
Sending 13 bytes message Hello LoRa 1!
Send-wait
.
.
.
.
.
Send-Done
Sending 13 bytes message Hello LoRa 2!
Send-wait
.
.
.
.
.
Send-Done
I could the see the messages arriving at the Armtronix device in the Arduino monitor.
The first message was getting corrupted (only when running in the debugger) which after some trial and error I think was most probably due to my RegOpMode register mode configuration.
SX127X RegOpMode details
// Put device into LoRa + Sleep mode
rfm9XDevice.RegisterWriteByte(0x01, 0b10000000);
// Put device into LoRa + Standby mode
rfm9XDevice.RegisterWriteByte(0x01, 0b10000001);
After a couple of years and half a dozen platform ports still finding bugs in my samples…
Now that the device is running well, I’ll look at reducing power consumption and splitting the the payload packing code into a library. Also noticed an extra “,” on the end of a message so need to come up with a better way of doing the payload packing.
/*
Copyright ® 2018 December devMobile Software, All Rights Reserved
THIS CODE AND INFORMATION IS PROVIDED "AS IS" WITHOUT WARRANTY OF ANY
KIND, EITHER EXPRESSED OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE
IMPLIED WARRANTIES OF MERCHANTABILITY AND/OR FITNESS FOR A PARTICULAR
PURPOSE.
You can do what you want with this code, acknowledgment would be nice.
http://www.devmobile.co.nz
*/
#include <stdlib.h>
#include <LoRa.h>
#include <avr/dtostrf.h>
#include "DHT.h"
#define DEBUG
//#define DEBUG_TELEMETRY
//#define DEBUG_LORA
// LoRa field gateway configuration (these settings must match your field gateway)
const char FieldGatewayAddress[] = {"LoRaIoT1"};
const char DeviceAddress[] = {"SparkFunX1"};
const float FieldGatewayFrequency = 915000000.0;
const byte FieldGatewaySyncWord = 0x12 ;
// Payload configuration
const int InterruptPin = 12;
const int ChipSelectPin = 6;
// LoRa radio payload configuration
const byte SensorIdValueSeperator = ' ' ;
const byte SensorReadingSeperator = ',' ;
const int LoopSleepDelaySeconds = 10 ;
const byte PayloadSizeMaximum = 64 ;
byte payload[PayloadSizeMaximum];
byte payloadLength = 0 ;
#define DHTPIN 4 // what digital pin we're connected to
// Uncomment whatever type you're using!
//#define DHTTYPE DHT11 // DHT 11
#define DHTTYPE DHT22 // DHT 22 (AM2302), AM2321
//#define DHTTYPE DHT21 // DHT 21 (AM2301)
DHT dht(DHTPIN, DHTTYPE);
void setup()
{
SerialUSB.begin(9600);
#ifdef DEBUG
while (!SerialUSB);
#endif
SerialUSB.println("Setup called");
SerialUSB.println("LoRa setup start");
// override the default chip select and reset pins
LoRa.setPins(InterruptPin, ChipSelectPin);
if (!LoRa.begin(FieldGatewayFrequency))
{
SerialUSB.println("LoRa begin failed");
while (true); // Drop into endless loop requiring restart
}
// Need to do this so field gateways pays attention to messsages from this device
LoRa.enableCrc();
LoRa.setSyncWord(FieldGatewaySyncWord);
#ifdef DEBUG_LORA
LoRa.dumpRegisters(SerialUSB);
#endif
SerialUSB.println("LoRa Setup done.");
// Configure the Seeedstudio TH02 temperature & humidity sensor
SerialUSB.println("DHT setup start");
dht.begin();
delay(100);
SerialUSB.println("DHT setup done");
PayloadHeader((byte*)FieldGatewayAddress,strlen(FieldGatewayAddress), (byte*)DeviceAddress, strlen(DeviceAddress));
SerialUSB.println("Setup done");
SerialUSB.println();
}
void loop()
{
float temperature = 17.2;
float humidity = 75.0;
SerialUSB.println("Loop called");
PayloadReset();
// Read the temperature & humidity & battery voltage values then display nicely
temperature = dht.readTemperature();
humidity = dht.readHumidity();
if (isnan(humidity) || isnan(temperature))
{
SerialUSB.println("Failed to read from DHT sensor!");
return;
}
SerialUSB.print("T:");
SerialUSB.print( temperature, 1 ) ;
SerialUSB.println( "C " ) ;
PayloadAdd( "T", temperature, 1);
SerialUSB.print("H:");
SerialUSB.print( humidity, 0 ) ;
SerialUSB.println( "% " ) ;
PayloadAdd( "H", humidity, 0) ;
#ifdef DEBUG_TELEMETRY
SerialUSB.println();
SerialUSB.print( "RFM9X/SX127X Payload length:");
SerialUSB.print( payloadLength );
SerialUSB.println( " bytes" );
#endif
LoRa.beginPacket();
LoRa.write( payload, payloadLength );
LoRa.endPacket();
SerialUSB.println("Loop done");
SerialUSB.println();
delay(LoopSleepDelaySeconds * 1000l);
}
void PayloadHeader( byte *to, byte toAddressLength, byte *from, byte fromAddressLength)
{
byte addressesLength = toAddressLength + fromAddressLength ;
#ifdef DEBUG_TELEMETRY
SerialUSB.println("PayloadHeader- ");
SerialUSB.print( "To Address len:");
SerialUSB.print( toAddressLength );
SerialUSB.print( " From Address len:");
SerialUSB.print( fromAddressLength );
SerialUSB.print( " Addresses length:");
SerialUSB.print( addressesLength );
SerialUSB.println( );
#endif
payloadLength = 0 ;
// prepare the payload header with "To" Address length (top nibble) and "From" address length (bottom nibble)
payload[payloadLength] = (toAddressLength << 4) | fromAddressLength ;
payloadLength += 1;
// Copy the "To" address into payload
memcpy(&payload[payloadLength], to, toAddressLength);
payloadLength += toAddressLength ;
// Copy the "From" into payload
memcpy(&payload[payloadLength], from, fromAddressLength);
payloadLength += fromAddressLength ;
}
void PayloadAdd( char *sensorId, float value, byte decimalPlaces)
{
byte sensorIdLength = strlen( sensorId ) ;
#ifdef DEBUG_TELEMETRY
SerialUSB.println("PayloadAdd-float ");
SerialUSB.print( "SensorId:");
SerialUSB.print( sensorId );
SerialUSB.print( " sensorIdLen:");
SerialUSB.print( sensorIdLength );
SerialUSB.print( " Value:");
SerialUSB.print( value, decimalPlaces );
SerialUSB.print( " payloadLength:");
SerialUSB.print( payloadLength);
#endif
memcpy( &payload[payloadLength], sensorId, sensorIdLength) ;
payloadLength += sensorIdLength ;
payload[ payloadLength] = SensorIdValueSeperator;
payloadLength += 1 ;
payloadLength += strlen( dtostrf(value, -1, decimalPlaces, (char *)&payload[payloadLength]));
payload[ payloadLength] = SensorReadingSeperator;
payloadLength += 1 ;
#ifdef DEBUG_TELEMETRY
SerialUSB.print( " payloadLength:");
SerialUSB.print( payloadLength);
SerialUSB.println( );
#endif
}
void PayloadAdd( char *sensorId, int value )
{
byte sensorIdLength = strlen( sensorId ) ;
#ifdef DEBUG_TELEMETRY
SerialUSB.println("PayloadAdd-int ");
SerialUSB.print( "SensorId:");
SerialUSB.print( sensorId );
SerialUSB.print( " sensorIdLen:");
SerialUSB.print( sensorIdLength );
SerialUSB.print( " Value:");
SerialUSB.print( value );
SerialUSB.print( " payloadLength:");
SerialUSB.print( payloadLength);
#endif
memcpy( &payload[payloadLength], sensorId, sensorIdLength) ;
payloadLength += sensorIdLength ;
payload[ payloadLength] = SensorIdValueSeperator;
payloadLength += 1 ;
payloadLength += strlen( itoa( value,(char *)&payload[payloadLength],10));
payload[ payloadLength] = SensorReadingSeperator;
payloadLength += 1 ;
#ifdef DEBUG_TELEMETRY
SerialUSB.print( " payloadLength:");
SerialUSB.print( payloadLength);
SerialUSB.println( );
#endif
}
void PayloadAdd( char *sensorId, unsigned int value )
{
byte sensorIdLength = strlen( sensorId ) ;
#ifdef DEBUG_TELEMETRY
SerialUSB.println("PayloadAdd-unsigned int ");
SerialUSB.print( "SensorId:");
SerialUSB.print( sensorId );
SerialUSB.print( " sensorIdLen:");
SerialUSB.print( sensorIdLength );
SerialUSB.print( " Value:");
SerialUSB.print( value );
SerialUSB.print( " payloadLength:");
SerialUSB.print( payloadLength);
#endif
memcpy( &payload[payloadLength], sensorId, sensorIdLength) ;
payloadLength += sensorIdLength ;
payload[ payloadLength] = SensorIdValueSeperator;
payloadLength += 1 ;
payloadLength += strlen( utoa( value,(char *)&payload[payloadLength],10));
payload[ payloadLength] = SensorReadingSeperator;
payloadLength += 1 ;
#ifdef DEBUG_TELEMETRY
SerialUSB.print( " payloadLength:");
SerialUSB.print( payloadLength);
SerialUSB.println( );
#endif
}
void PayloadReset()
{
byte fromAddressLength = payload[0] & 0xf ;
byte toAddressLength = payload[0] >> 4 ;
byte addressesLength = toAddressLength + fromAddressLength ;
payloadLength = addressesLength + 1;
#ifdef DEBUG_TELEMETRY
SerialUSB.println("PayloadReset- ");
SerialUSB.print( "To Address len:");
SerialUSB.print( toAddressLength );
SerialUSB.print( " From Address len:");
SerialUSB.print( fromAddressLength );
SerialUSB.print( " Addresses length:");
SerialUSB.print( addressesLength );
SerialUSB.println( );
#endif
}