Uploading the web camera images to Azure Storage was the next step.
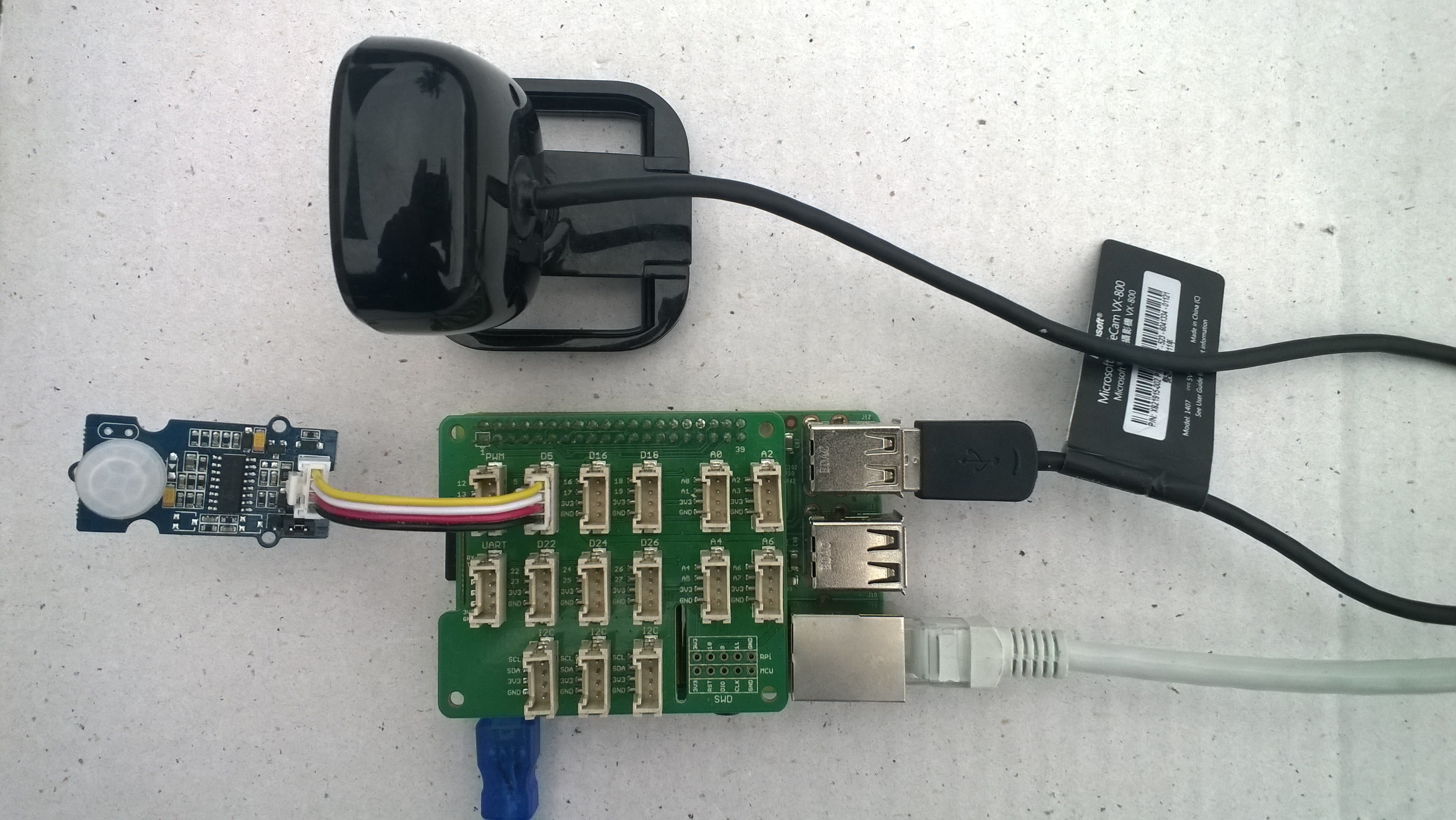
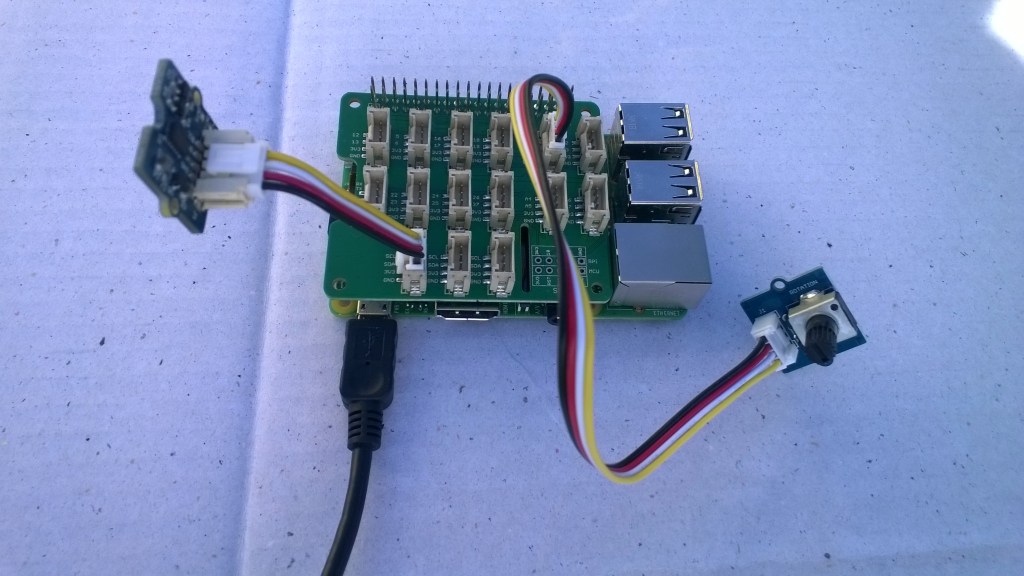
For my test harness (in addition to a RaspberryPI & generic USB Web camera) I’m using some Seeedstudio Grove devices
- Grove Base Hat for Raspberry PI USD9.90
- Grove – PIR Motion Sensor USD7.90
- Grove- Screw Terminal USD2.90
- Adjustable Infrared Switch USD2.80
While working on this code I realised I had made some invalid assumptions about the stream and the image properties so I refactored the code (which also made it simpler).
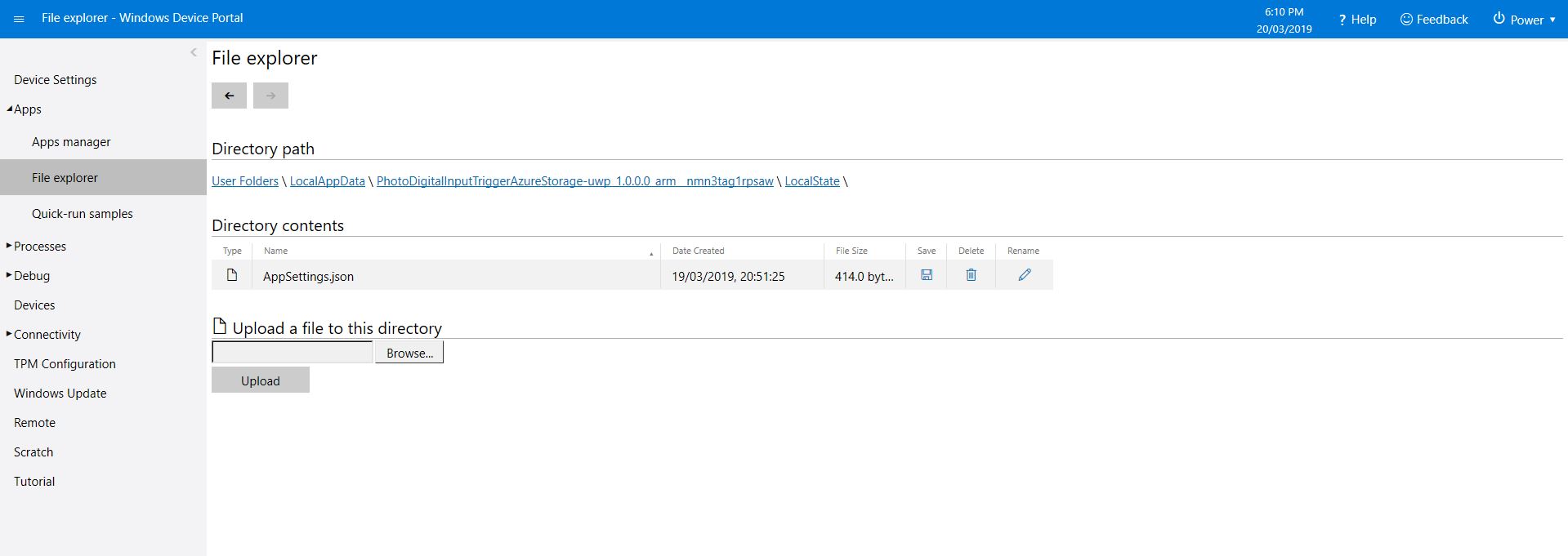
The Windows 10 IoT Core application has support for a JSON configuration file using Microsoft.Extensions.Configuration namespace functionality which took a bit of trial and error to get going.
IConfiguration configuration = new ConfigurationBuilder().
AddJsonFile(localFolder.Path + @"\" + ConfigurationFilename,
false,
true).Build();
This gets the configuration subsystem to use the specified file in the application’s localstate folder. If there is no configuration file present i.e. the application has just been deployed for the first time or installed a template file is copied from the application install directory.
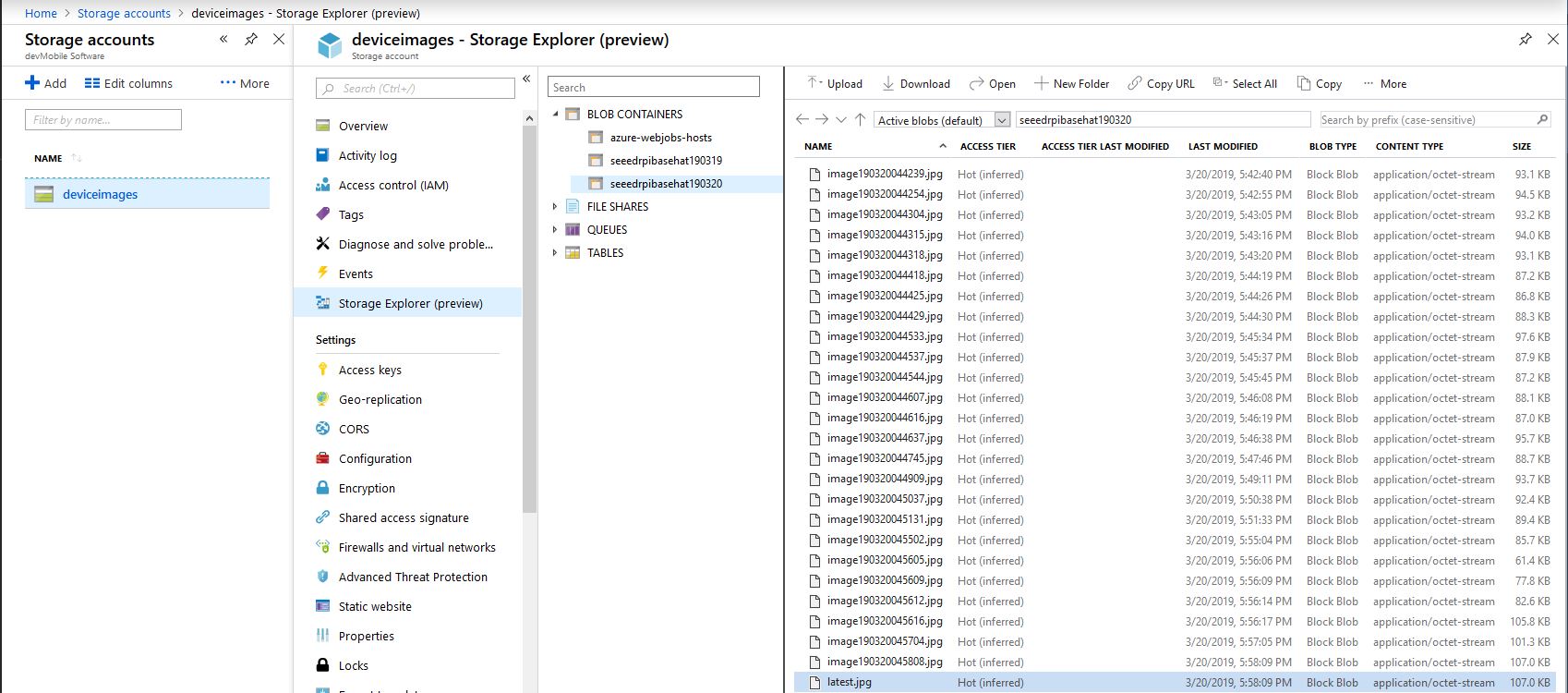
In the application configuration file you can specify the azure storage connection string, digital input port number, azure container name format (formatted machine name + Universal Coordinated Time(UTC)), the azure storage file name (formatted machine name + UTC) and the name of the file with the most recently uploaded image. These configuration settings are provided so that the image files can stored in “buckets” best suited to the way they are going to be processed.
{
"AzureStorageConnectionString": "",
"InterruptPinNumber": 5,
"AzureContainerNameFormat": "{0}{1:yyMMdd}",
"AzureImageFilenameFormat": "image{1:yyMMddHHmmss}.jpg",
"AzureImageFilenameLatest": "latest.jpg"
}
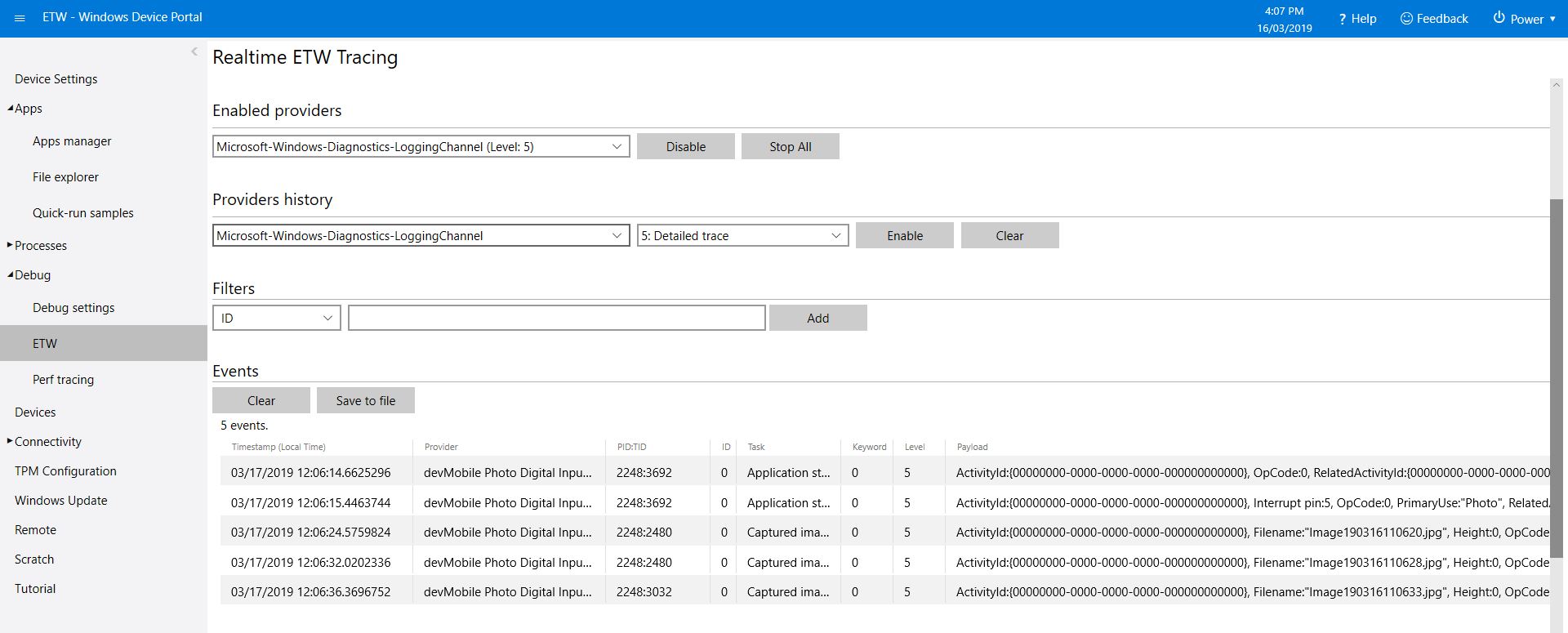
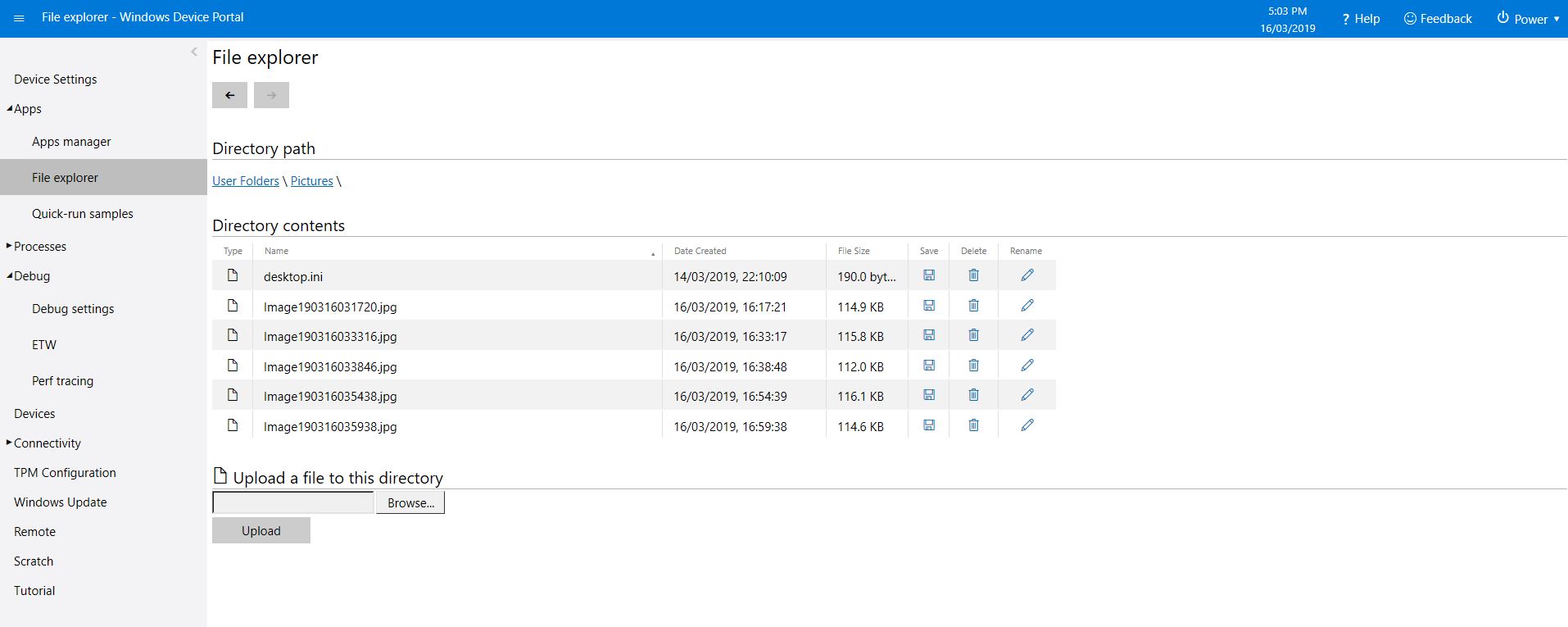
In my testing the pictures were stored in folders for each device/day and each image file had a timestamp in its name.
/*
Copyright ® 2019 March devMobile Software, All Rights Reserved
MIT License
...
*/
namespace devMobile.Windows10IotCore.IoT.PhotoDigitalInputTriggerAzureStorage
{
using System;
using System.Diagnostics;
using Microsoft.Extensions.Configuration;
using Microsoft.WindowsAzure.Storage;
using Microsoft.WindowsAzure.Storage.Blob;
using Windows.ApplicationModel;
using Windows.ApplicationModel.Background;
using Windows.Devices.Gpio;
using Windows.Foundation.Diagnostics;
using Windows.Media.Capture;
using Windows.Media.MediaProperties;
using Windows.Storage;
using Windows.System;
public sealed class StartupTask : IBackgroundTask
{
private BackgroundTaskDeferral backgroundTaskDeferral = null;
private readonly LoggingChannel logging = new LoggingChannel("devMobile Photo Digital Input Trigger Azure Storage demo", null, new Guid("4bd2826e-54a1-4ba9-bf63-92b73ea1ac4a"));
private const string ConfigurationFilename = "appsettings.json";
private GpioPin interruptGpioPin = null;
private int interruptPinNumber;
private MediaCapture mediaCapture;
private string azureStorageConnectionString;
private string azureStorageContainerNameFormat;
private string azureStorageimageFilenameLatest;
private string azureStorageImageFilenameFormat;
private const string ImageFilenameLocal = "latest.jpg";
private volatile bool cameraBusy = false;
public void Run(IBackgroundTaskInstance taskInstance)
{
StorageFolder localFolder = ApplicationData.Current.LocalFolder;
this.logging.LogEvent("Application starting");
// Log the Application build, shield information etc.
LoggingFields startupInformation = new LoggingFields();
startupInformation.AddString("Timezone", TimeZoneSettings.CurrentTimeZoneDisplayName);
startupInformation.AddString("OSVersion", Environment.OSVersion.VersionString);
startupInformation.AddString("MachineName", Environment.MachineName);
// This is from the application manifest
Package package = Package.Current;
PackageId packageId = package.Id;
PackageVersion version = packageId.Version;
startupInformation.AddString("ApplicationVersion", string.Format($"{version.Major}.{version.Minor}.{version.Build}.{version.Revision}"));
try
{
// see if the configuration file is present if not copy minimal sample one from application directory
if (localFolder.TryGetItemAsync(ConfigurationFilename).AsTask().Result == null)
{
StorageFile templateConfigurationfile = Package.Current.InstalledLocation.GetFileAsync(ConfigurationFilename).AsTask().Result;
templateConfigurationfile.CopyAsync(localFolder, ConfigurationFilename).AsTask();
this.logging.LogMessage("JSON configuration file missing, templated created", LoggingLevel.Warning);
return;
}
IConfiguration configuration = new ConfigurationBuilder().AddJsonFile(localFolder.Path + @"\" + ConfigurationFilename, false, true).Build();
azureStorageConnectionString = configuration.GetSection("AzureStorageConnectionString").Value;
startupInformation.AddString("AzureStorageConnectionString", azureStorageConnectionString);
azureStorageContainerNameFormat = configuration.GetSection("AzureContainerNameFormat").Value;
startupInformation.AddString("ContainerNameFormat", azureStorageContainerNameFormat);
azureStorageImageFilenameFormat = configuration.GetSection("AzureImageFilenameFormat").Value;
startupInformation.AddString("ImageFilenameFormat", azureStorageImageFilenameFormat);
azureStorageimageFilenameLatest = configuration.GetSection("AzureImageFilenameLatest").Value;
startupInformation.AddString("ImageFilenameLatest", azureStorageimageFilenameLatest);
interruptPinNumber = int.Parse( configuration.GetSection("InterruptPinNumber").Value);
startupInformation.AddInt32("Interrupt pin", interruptPinNumber);
}
catch (Exception ex)
{
this.logging.LogMessage("JSON configuration file load or settings retrieval failed " + ex.Message, LoggingLevel.Error);
return;
}
try
{
mediaCapture = new MediaCapture();
mediaCapture.InitializeAsync().AsTask().Wait();
}
catch (Exception ex)
{
this.logging.LogMessage("Camera configuration failed " + ex.Message, LoggingLevel.Error);
return;
}
try
{
GpioController gpioController = GpioController.GetDefault();
interruptGpioPin = gpioController.OpenPin(interruptPinNumber);
interruptGpioPin.SetDriveMode(GpioPinDriveMode.InputPullUp);
interruptGpioPin.ValueChanged += InterruptGpioPin_ValueChanged;
}
catch (Exception ex)
{
this.logging.LogMessage("Digital input configuration failed " + ex.Message, LoggingLevel.Error);
return;
}
this.logging.LogEvent("Application started", startupInformation);
//enable task to continue running in background
backgroundTaskDeferral = taskInstance.GetDeferral();
}
private async void InterruptGpioPin_ValueChanged(GpioPin sender, GpioPinValueChangedEventArgs args)
{
DateTime currentTime = DateTime.UtcNow;
Debug.WriteLine($"{DateTime.UtcNow.ToLongTimeString()} Digital Input Interrupt {sender.PinNumber} triggered {args.Edge}");
if (args.Edge == GpioPinEdge.RisingEdge)
{
return;
}
// Just incase - stop code being called while photo already in progress
if (cameraBusy)
{
return;
}
cameraBusy = true;
try
{
StorageFile photoFile = await KnownFolders.PicturesLibrary.CreateFileAsync(ImageFilenameLocal, CreationCollisionOption.ReplaceExisting);
ImageEncodingProperties imageProperties = ImageEncodingProperties.CreateJpeg();
await mediaCapture.CapturePhotoToStorageFileAsync(imageProperties, photoFile);
string azureContainername = string.Format(azureStorageContainerNameFormat, Environment.MachineName.ToLower(), currentTime);
string azureStoragefilename = string.Format(azureStorageImageFilenameFormat, Environment.MachineName.ToLower(), currentTime);
LoggingFields imageInformation = new LoggingFields();
imageInformation.AddDateTime("TakenAtUTC", currentTime);
imageInformation.AddString("LocalFilename", photoFile.Path);
imageInformation.AddString("AzureContainerName", azureContainername);
imageInformation.AddString("AzureStorageFilename", azureStoragefilename);
imageInformation.AddString("AzureStorageFilenameLatest", azureStorageimageFilenameLatest);
this.logging.LogEvent("Image saving to Azure storage", imageInformation);
CloudStorageAccount storageAccount = CloudStorageAccount.Parse(azureStorageConnectionString);
CloudBlobClient blobClient = storageAccount.CreateCloudBlobClient();
CloudBlobContainer container = blobClient.GetContainerReference(azureContainername);
await container.CreateIfNotExistsAsync();
CloudBlockBlob blockBlob = container.GetBlockBlobReference(azureStoragefilename);
await blockBlob.UploadFromFileAsync(photoFile);
blockBlob = container.GetBlockBlobReference(azureStorageimageFilenameLatest);
await blockBlob.UploadFromFileAsync(photoFile);
this.logging.LogEvent("Image saved to Azure storage");
}
catch (Exception ex)
{
this.logging.LogMessage("Camera photo save or upload failed " + ex.Message, LoggingLevel.Error);
}
finally
{
cameraBusy = false;
}
}
}
}
I need to add some code to ensure there is a minimum gap between photos and trial some different sensors. For example, an Adjustable Infrared Switch has proved to be a better option for some of my projects.
The code is available on GitHub and is a bit of a work in progress.