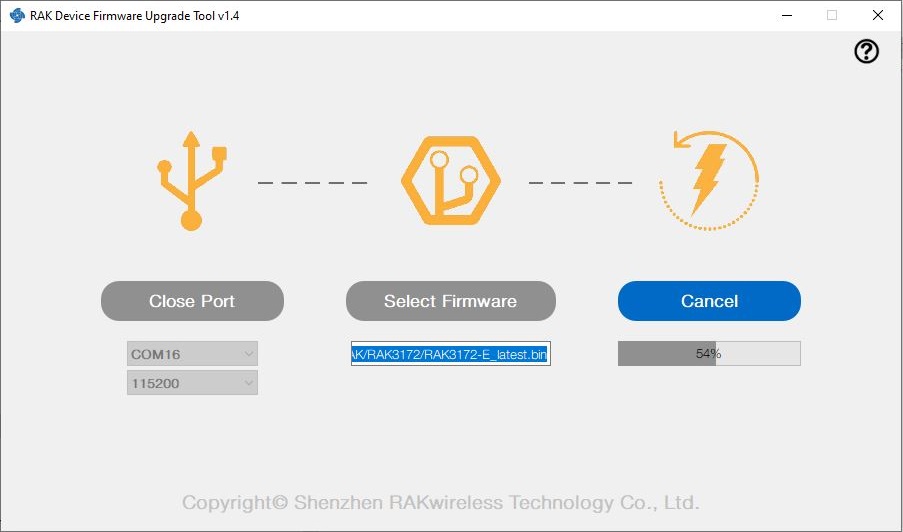
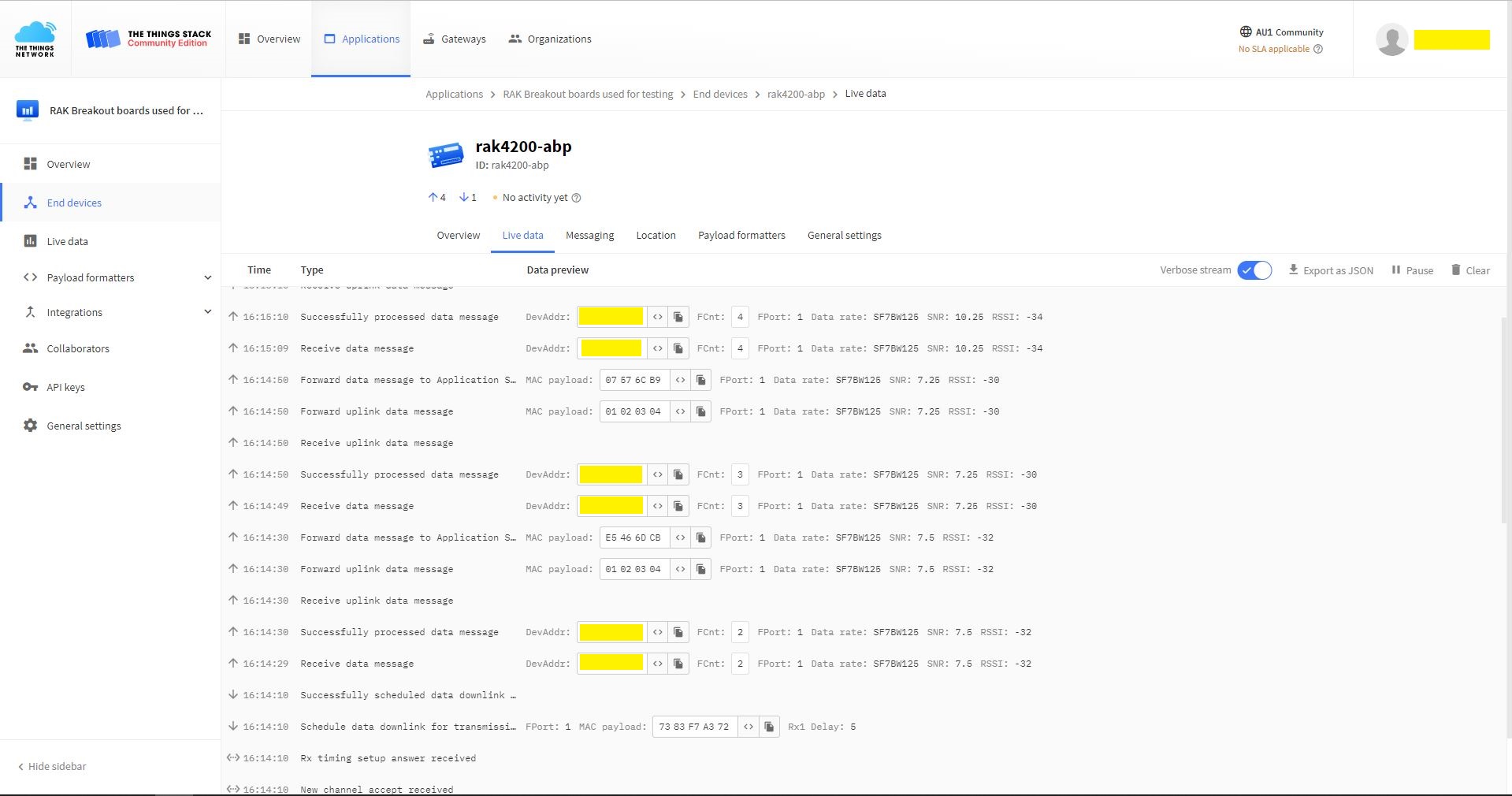
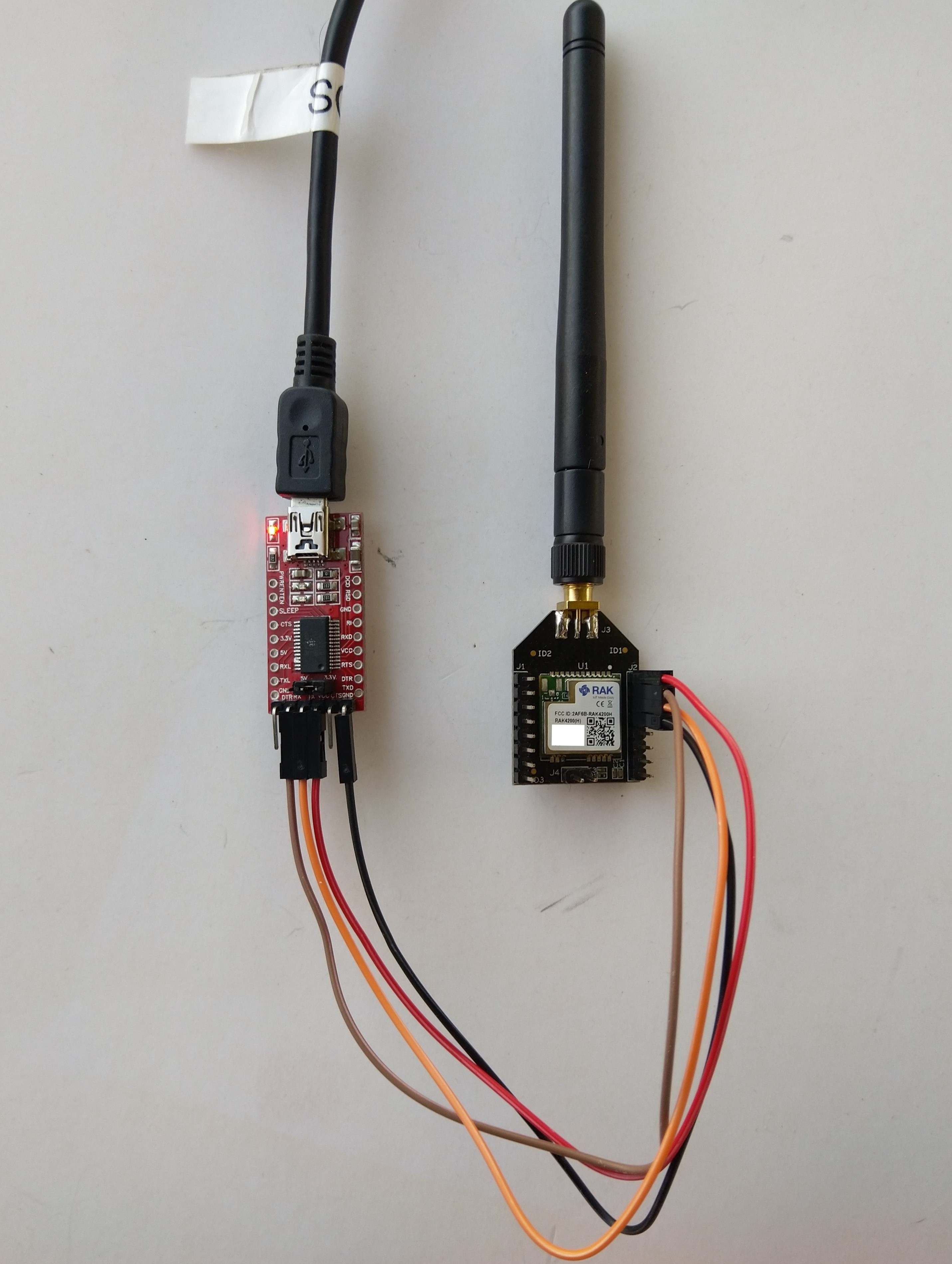
When I first tried Over The Air Activation(OTAA) to connect to The Things Network(TTN) with my RAKwireless RAK3172 module it didn’t work. I had flashed my Sparkfun Thing plus ESP32 WROOM with the ESP32 PSRAM binaries (Thanks AlbertK on the nanoFramework Discord).
nanoff --target ESP32_REV0 --serialport COM17 --update
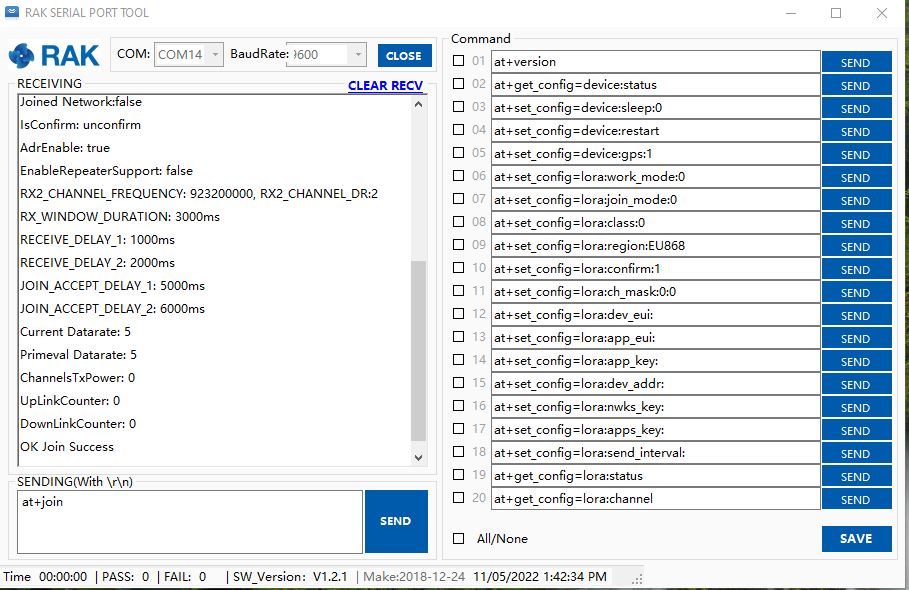
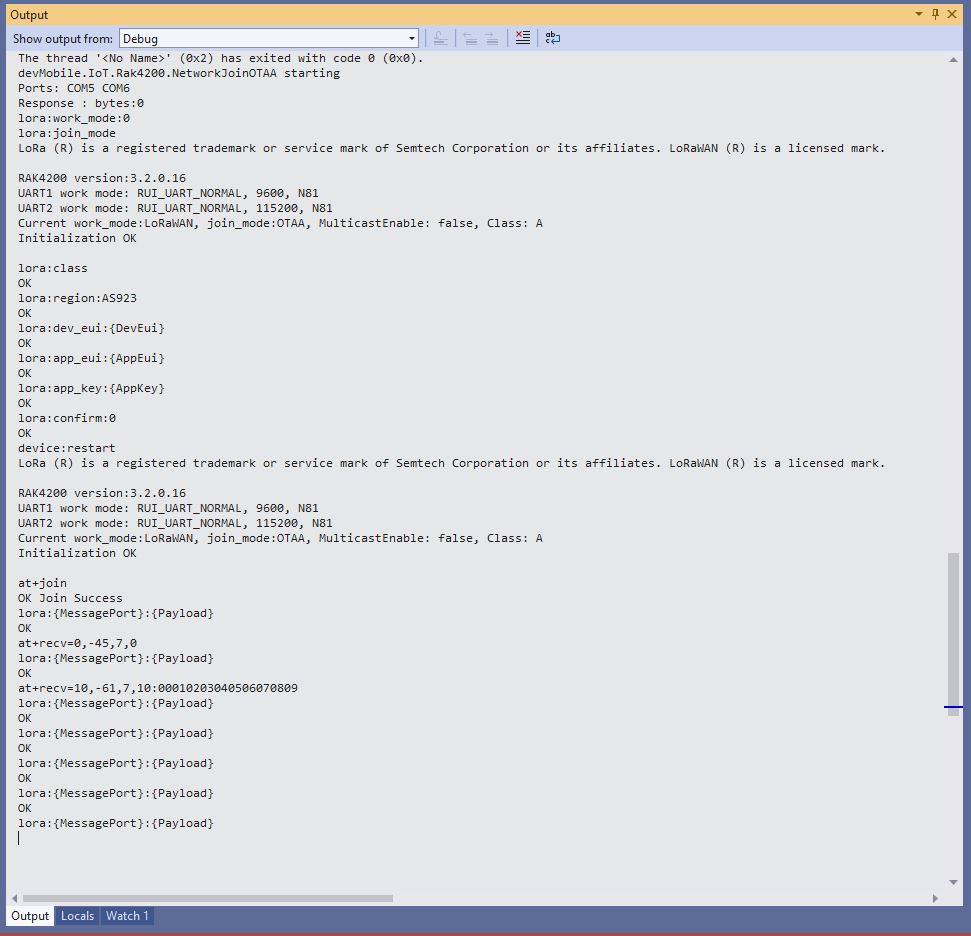
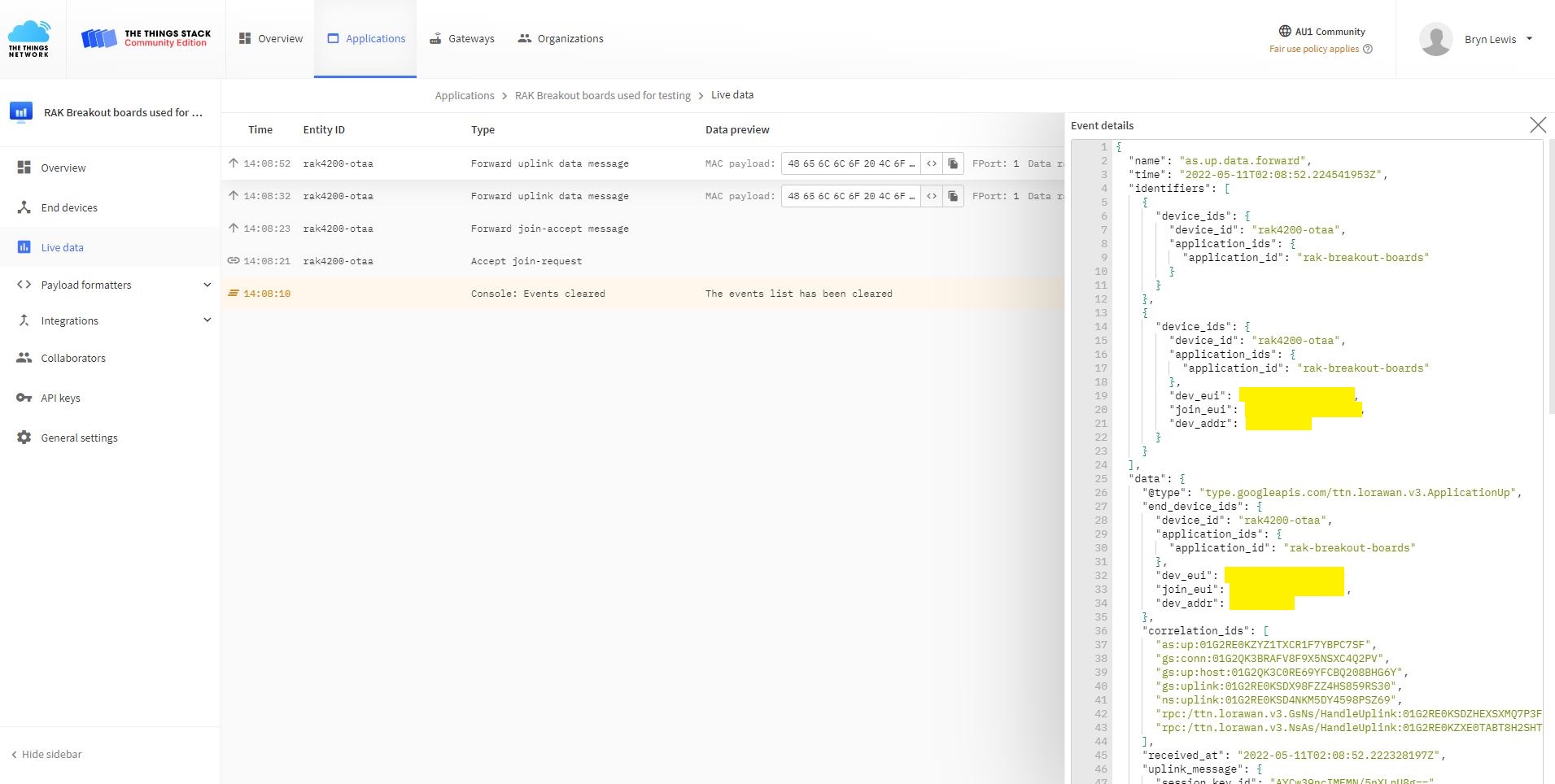
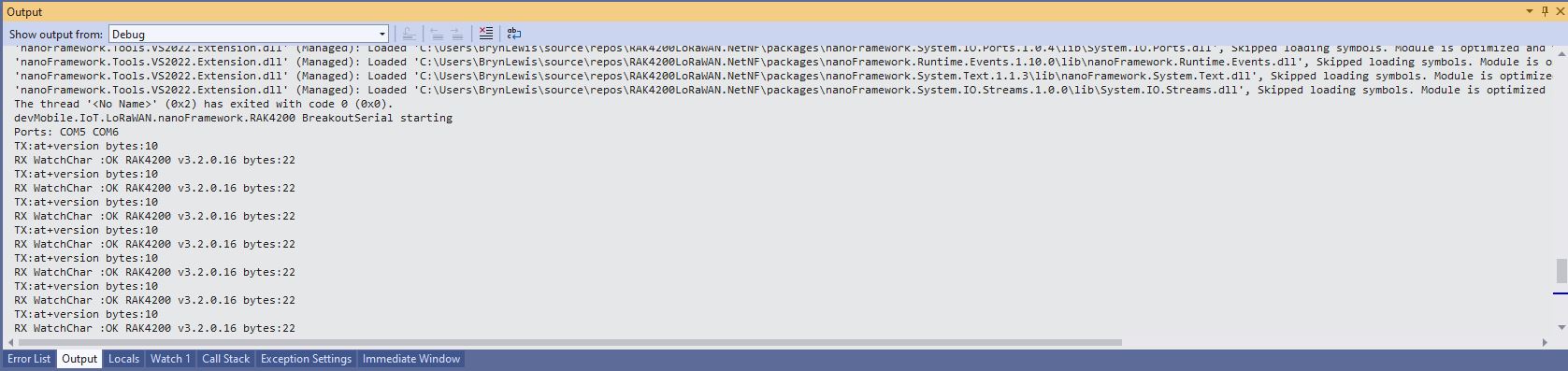
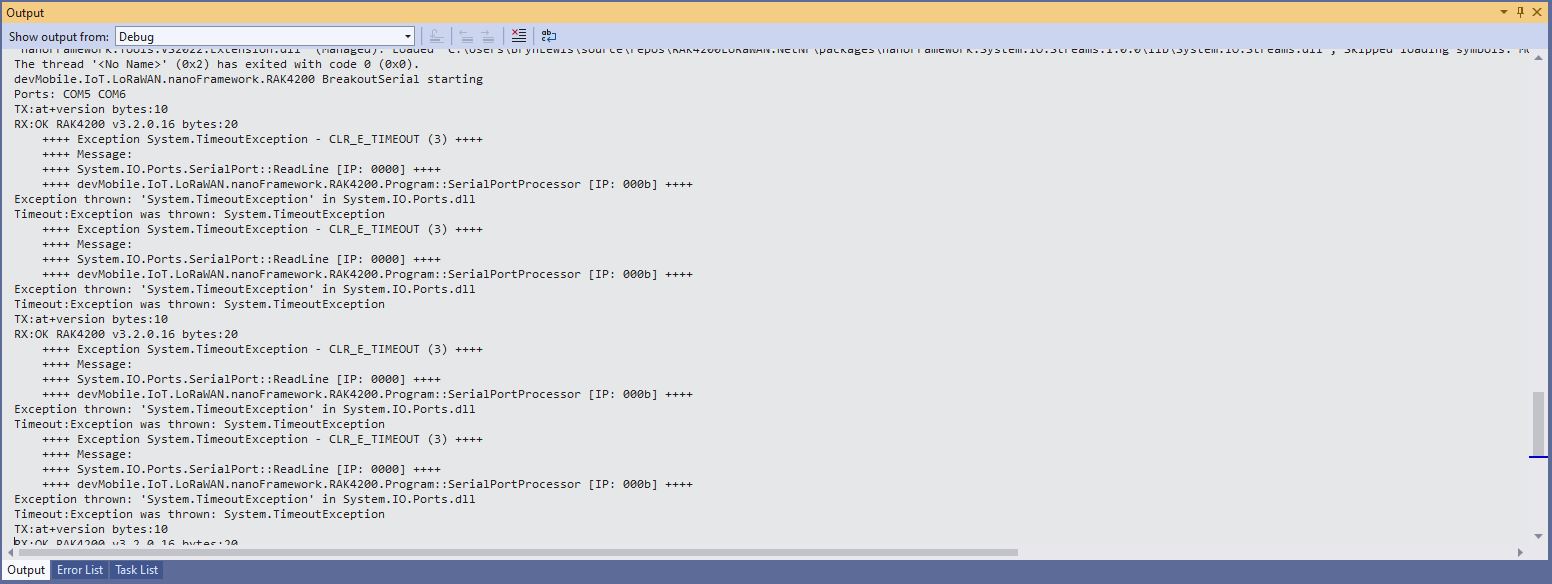
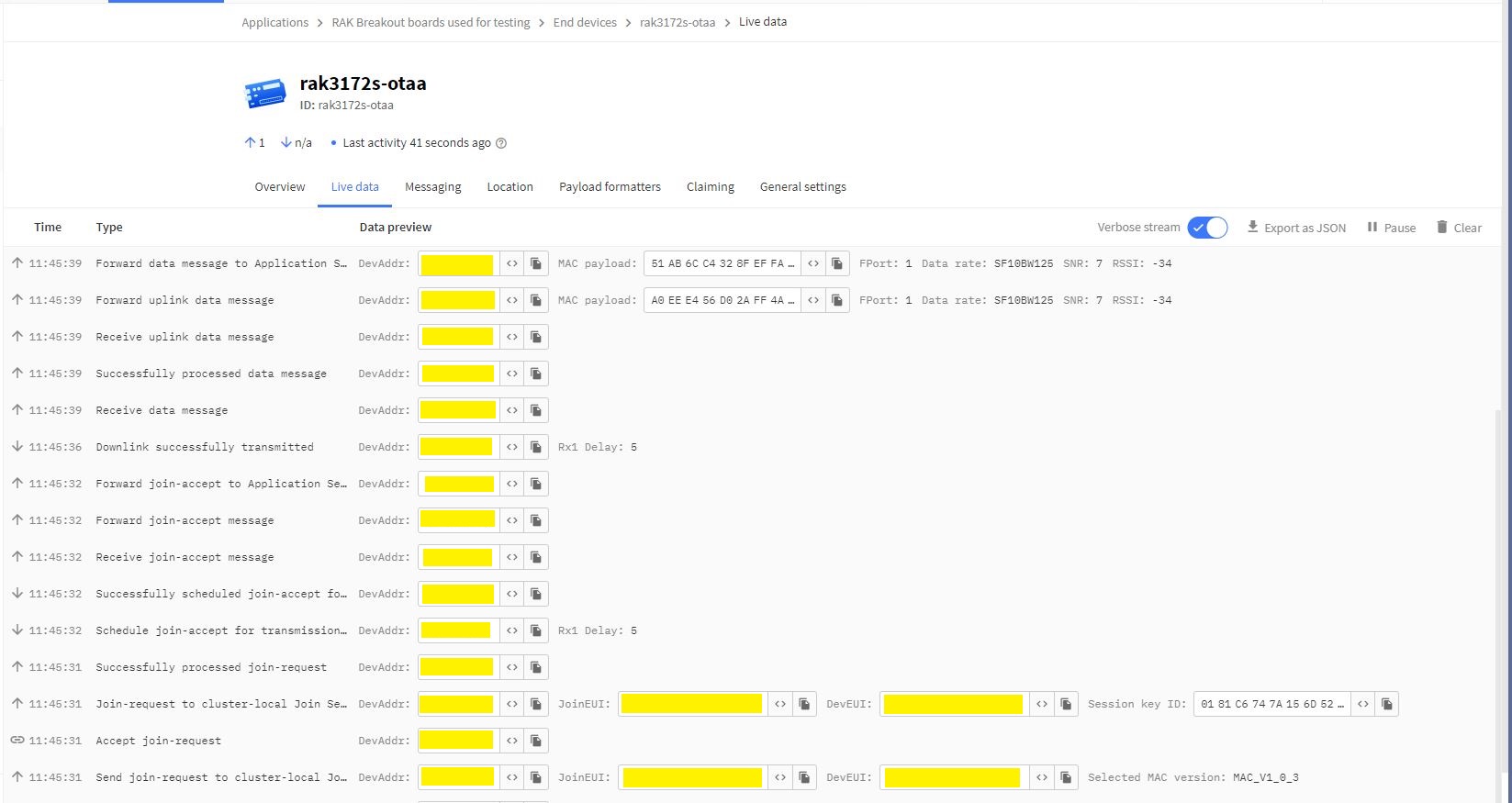
I modified the NetworkJoinOTAA sample (based on the asynchronous version of BreakOutSerial) to send the sequence of AT commands to join The Things Network(TTN) and display the responses.
#define ST_STM32F769I_DISCOVERY // nanoff --target ST_STM32F769I_DISCOVERY --update
//#define ESP32_WROOM //nanoff --target ESP32_REV0 --serialport COM17 --update
namespace devMobile.IoT.LoRaWAN.nanoFramework.RAK3172
{
using System;
using System.Diagnostics;
using System.IO.Ports;
using System.Threading;
#if ESP32_WROOM
using global::nanoFramework.Hardware.Esp32; //need NuGet nanoFramework.Hardware.Esp32
#endif
public class Program
{
#if ESP32_WROOM
private const string SerialPortId = "COM2";
#endif
#if ST_STM32F769I_DISCOVERY
private const string SerialPortId = "COM6";
#endif
private const string DevEui = "...";
private const string AppEui = "...";
private const string AppKey = "...";
private const byte MessagePort = 1;
private const string Payload = "A0EEE456D02AFF4AB8BAFD58101D2A2A"; // Hello LoRaWAN
public static void Main()
{
Debug.WriteLine("devMobile.IoT.LoRaWAN.nanoFramework.RAK3172 NetworkJoinOTAA starting");
try
{
// set GPIO functions for COM2 (this is UART1 on ESP32)
#if ESP32_WROOM
Configuration.SetPinFunction(Gpio.IO17, DeviceFunction.COM2_TX);
Configuration.SetPinFunction(Gpio.IO16, DeviceFunction.COM2_RX);
#endif
Debug.Write("Ports:");
foreach (string port in SerialPort.GetPortNames())
{
Debug.Write($" {port}");
}
Debug.WriteLine("");
using (SerialPort serialPort = new SerialPort(SerialPortId))
{
// set parameters
serialPort.BaudRate = 115200;
serialPort.Parity = Parity.None;
serialPort.DataBits = 8;
serialPort.StopBits = StopBits.One;
serialPort.Handshake = Handshake.None;
serialPort.NewLine = "\r\n";
serialPort.ReadTimeout = 1000;
serialPort.DataReceived += SerialDevice_DataReceived;
serialPort.Open();
serialPort.WatchChar = '\n';
serialPort.ReadExisting(); // Running at 115K2 this was necessary
// Set the devEUI
Console.WriteLine("Set Dev Eui");
serialPort.WriteLine($"AT+DEVEUI={DevEui}");
// Set the Working mode to LoRaWAN
Console.WriteLine("Set Work mode");
serialPort.WriteLine("AT+NWM=1");
// Set the Region to AS923
Console.WriteLine("Set Region");
serialPort.WriteLine("AT+BAND=8");
// Set the JoinMode
Console.WriteLine("Set Join mode");
serialPort.WriteLine("AT+NJM=1");
// Set the appEUI
Console.WriteLine("Set App Eui");
serialPort.WriteLine($"AT+APPEUI={AppEui}");
// Set the appKey
Console.WriteLine("Set App Key");
serialPort.WriteLine($"AT+APPKEY={AppKey}");
// Set the Confirm flag
Console.WriteLine("Set Confirm off");
serialPort.WriteLine("AT+CFM=0");
// Join the network
Console.WriteLine("Start Join");
serialPort.WriteLine("AT+JOIN=1:0:10:2");
// Wait for the +EVT:JOINED
while (true)
{
Console.WriteLine("Sending");
serialPort.WriteLine($"AT+SEND={MessagePort}:{Payload}");
Thread.Sleep(300000);
}
}
}
catch (Exception ex)
{
Debug.WriteLine(ex.Message);
}
}
private static void SerialDevice_DataReceived(object sender, SerialDataReceivedEventArgs e)
{
SerialPort serialPort = (SerialPort)sender;
switch (e.EventType)
{
case SerialData.Chars:
break;
case SerialData.WatchChar:
string response = serialPort.ReadExisting();
Debug.Write(response);
break;
default:
Debug.Assert(false, $"e.EventType {e.EventType} unknown");
break;
}
}
}
}

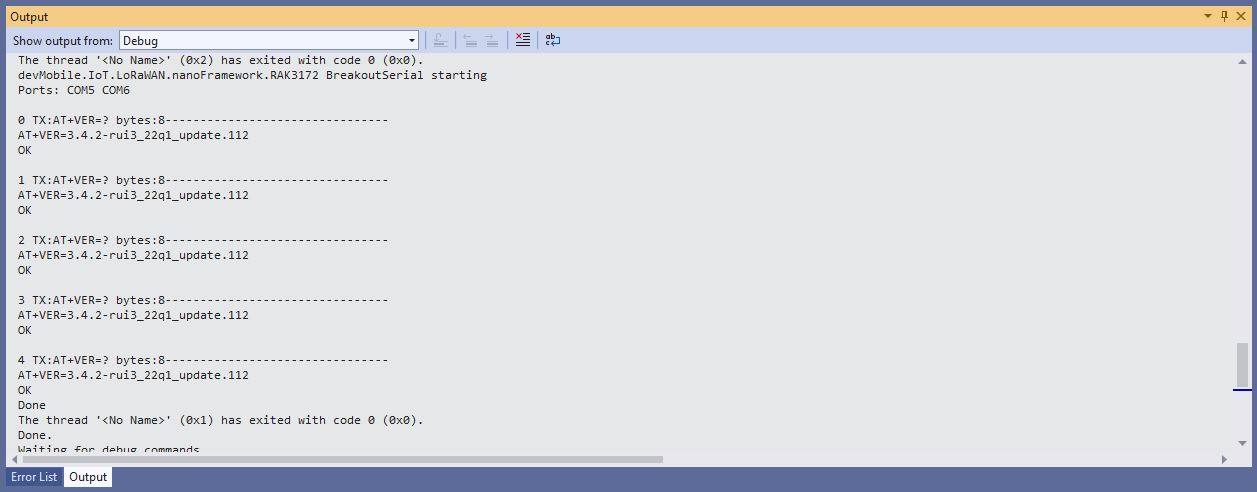
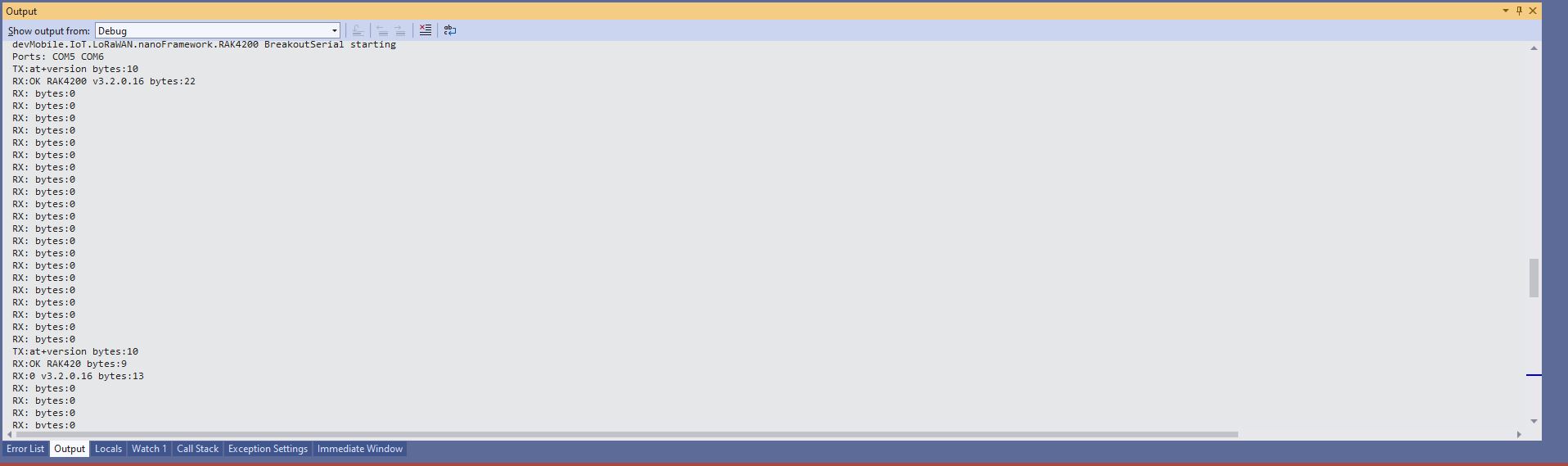
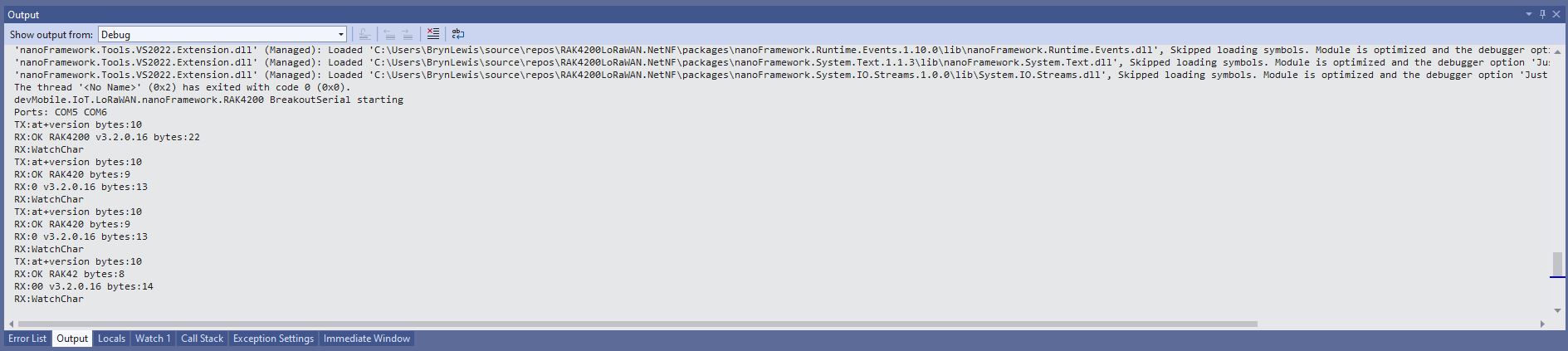
The NetworkJoinOTAA application assumes that all of the AT commands succeed. I usually step though the application in the debugger so I can monitor progress.