Random wanderings through Microsoft Azure esp. PaaS plumbing, the IoT bits, AI on Micro controllers, AI on Edge Devices, .NET nanoFramework, .NET Core on *nix and ML.NET+ONNX
//---------------------------------------------------------------------------------
// Copyright (c) January 2020, devMobile Software
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
//
//---------------------------------------------------------------------------------
namespace devMobile.IoT.FieldGateway.Client
{
using System;
using System.Text;
using System.Threading;
using devMobile.IoT.Rfm9x;
using Meadow;
using Meadow.Devices;
using Meadow.Foundation.Leds;
using Meadow.Foundation.Sensors.Atmospheric;
using Meadow.Hardware;
using Meadow.Peripherals.Leds;
public class MeadowClient : App<F7Micro, MeadowClient>
{
private const double Frequency = 915000000.0;
private readonly byte[] fieldGatewayAddress = Encoding.UTF8.GetBytes("LoRaIoT1");
private readonly byte[] deviceAddress = Encoding.UTF8.GetBytes("Meadow");
private readonly Rfm9XDevice rfm9XDevice;
private readonly TimeSpan periodTime = new TimeSpan(0, 0, 60);
private readonly Sht31D sensor;
private readonly ILed Led;
public MeadowClient()
{
Led = new Led(Device, Device.Pins.OnboardLedGreen);
try
{
sensor = new Sht31D(Device.CreateI2cBus());
ISpiBus spiBus = Device.CreateSpiBus(500);
rfm9XDevice = new Rfm9XDevice(Device, spiBus, Device.Pins.D09, Device.Pins.D10, Device.Pins.D12);
rfm9XDevice.Initialise(Frequency, paBoost: true, rxPayloadCrcOn: true);
#if DEBUG
rfm9XDevice.RegisterDump();
#endif
rfm9XDevice.OnReceive += Rfm9XDevice_OnReceive;
rfm9XDevice.Receive(deviceAddress);
rfm9XDevice.OnTransmit += Rfm9XDevice_OnTransmit;
}
catch (Exception ex)
{
Console.WriteLine(ex.Message);
}
while (true)
{
sensor.Update();
Console.WriteLine($"{DateTime.UtcNow:HH:mm:ss}-TX T:{sensor.Temperature:0.0}C H:{sensor.Humidity:0}%");
string payload = $"t {sensor.Temperature:0.0},h {sensor.Humidity:0}";
Led.IsOn = true;
rfm9XDevice.Send(fieldGatewayAddress, Encoding.UTF8.GetBytes(payload));
Thread.Sleep(periodTime);
}
}
private void Rfm9XDevice_OnReceive(object sender, Rfm9XDevice.OnDataReceivedEventArgs e)
{
try
{
string addressText = UTF8Encoding.UTF8.GetString(e.Address);
string addressHex = BitConverter.ToString(e.Address);
string messageText = UTF8Encoding.UTF8.GetString(e.Data);
Console.WriteLine($"{DateTime.UtcNow:HH:mm:ss}-RX PacketSnr {e.PacketSnr:0.0} Packet RSSI {e.PacketRssi}dBm RSSI {e.Rssi}dBm = {e.Data.Length} byte message {messageText}");
}
catch (Exception ex)
{
Console.WriteLine(ex.Message);
}
}
private void Rfm9XDevice_OnTransmit(object sender, Rfm9XDevice.OnDataTransmitedEventArgs e)
{
Led.IsOn = false;
Console.WriteLine("{0:HH:mm:ss}-TX Done", DateTime.Now);
}
}
}
The Meadow platform is a work in progress (Jan 2020) so I haven’t put any effort into minimising power consumption but will revisit this in a future post.
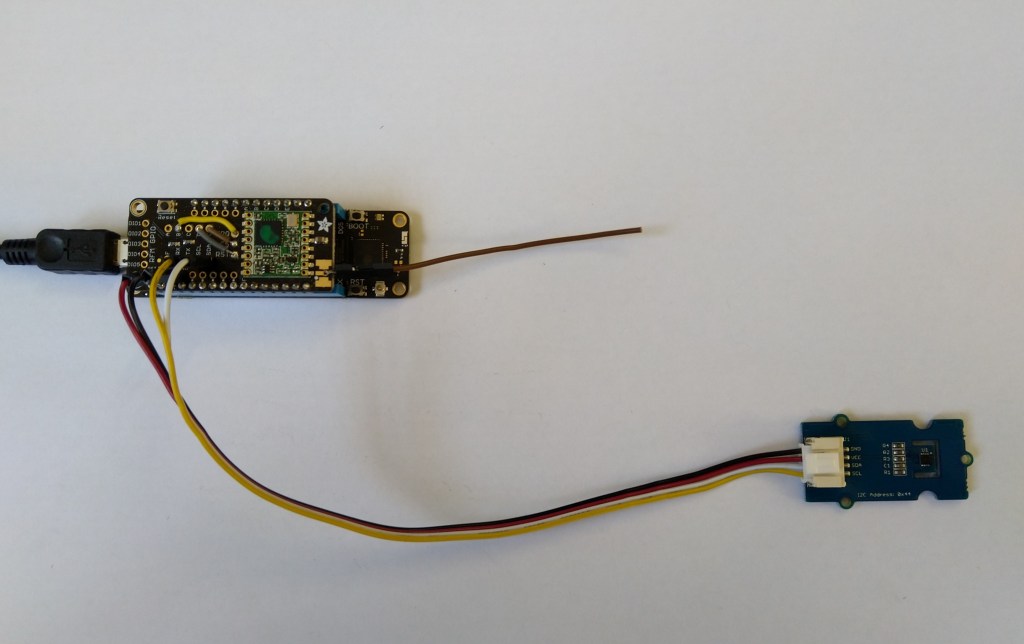
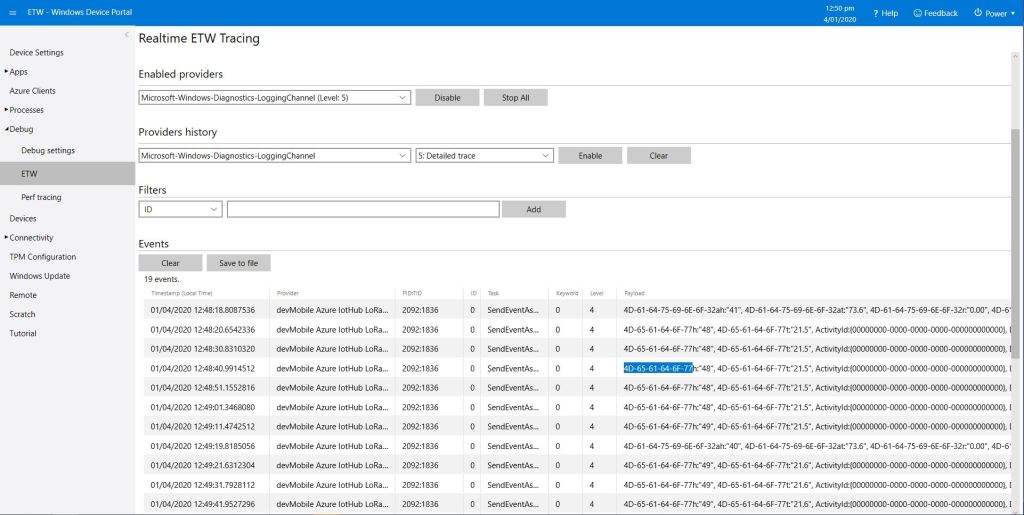
Meadow device with Seeedstudio SHT31 temperature & humidity sensorMeadow sensor data in Field Gateway ETW loggingMeadow Sensor data in Azure IoT Central
Grove – 4 pin Female Jumper to Grove 4 pin Conversion Cable USD3.90
Armtronix device with Seeedstudio temperature & humidity sensor
I used a modified version of my Arduino client code which worked after I got the pins sorted and the female jumper sockets in the right order.
/*
Copyright ® 2019 December devMobile Software, All Rights Reserved
THIS CODE AND INFORMATION IS PROVIDED "AS IS" WITHOUT WARRANTY OF ANY
KIND, EITHER EXPRESSED OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE
IMPLIED WARRANTIES OF MERCHANTABILITY AND/OR FITNESS FOR A PARTICULAR
PURPOSE.
You can do what you want with this code, acknowledgment would be nice.
http://www.devmobile.co.nz
*/
#include <stdlib.h>
#include <LoRa.h>
#include <TH02_dev.h>
//#define DEBUG
//#define DEBUG_TELEMETRY
//#define DEBUG_LORA
// LoRa field gateway configuration (these settings must match your field gateway)
const char FieldGatewayAddress[] = {"LoRaIoT1"};
const char DeviceAddress[] = {"ArmTronix01"};
const float FieldGatewayFrequency = 915000000.0;
const byte FieldGatewaySyncWord = 0x12 ;
// Payload configuration
const int ChipSelectPin = PA4;
const int InterruptPin = PA11;
const int ResetPin = PC13;
// LoRa radio payload configuration
const byte SensorIdValueSeperator = ' ' ;
const byte SensorReadingSeperator = ',' ;
const int LoopSleepDelaySeconds = 30 ;
const byte PayloadSizeMaximum = 64 ;
byte payload[PayloadSizeMaximum];
byte payloadLength = 0 ;
void setup()
{
Serial.begin(9600);
#ifdef DEBUG
while (!Serial);
#endif
Serial.println("Setup called");
Serial.println("LoRa setup start");
// override the default chip select and reset pins
LoRa.setPins(ChipSelectPin, ResetPin, InterruptPin);
if (!LoRa.begin(FieldGatewayFrequency))
{
Serial.println("LoRa begin failed");
while (true); // Drop into endless loop requiring restart
}
// Need to do this so field gateways pays attention to messsages from this device
LoRa.enableCrc();
LoRa.setSyncWord(FieldGatewaySyncWord);
#ifdef DEBUG_LORA
LoRa.dumpRegisters(Serial);
#endif
Serial.println("LoRa Setup done.");
// Configure the Seeedstudio TH02 temperature & humidity sensor
Serial.println("TH02 setup start");
TH02.begin();
delay(100);
Serial.println("TH02 setup done");
PayloadHeader((byte*)FieldGatewayAddress,strlen(FieldGatewayAddress), (byte*)DeviceAddress, strlen(DeviceAddress));
Serial.println("Setup done");
Serial.println();
}
void loop()
{
float temperature ;
float humidity ;
Serial.println("Loop called");
PayloadReset();
// Read the temperature & humidity & battery voltage values then display nicely
temperature = TH02.ReadTemperature();
Serial.print("T:");
Serial.print( temperature, 1 ) ;
Serial.println( "C " ) ;
PayloadAdd( "T", temperature, 1);
humidity = TH02.ReadHumidity();
Serial.print("H:");
Serial.print( humidity, 0 ) ;
Serial.println( "% " ) ;
PayloadAdd( "H", humidity, 0) ;
#ifdef DEBUG_TELEMETRY
Serial.print( "RFM9X/SX127X Payload len:");
Serial.print( payloadLength );
Serial.println( " bytes" );
#endif
LoRa.beginPacket();
LoRa.write( payload, payloadLength );
LoRa.endPacket();
Serial.println("Loop done");
Serial.println();
delay(LoopSleepDelaySeconds * 1000l);
}
void PayloadHeader( byte *to, byte toAddressLength, byte *from, byte fromAddressLength)
{
byte addressesLength = toAddressLength + fromAddressLength ;
#ifdef DEBUG_TELEMETRY
Serial.print("PayloadHeader- ");
Serial.print( "To len:");
Serial.print( toAddressLength );
Serial.print( " From len:");
Serial.print( fromAddressLength );
Serial.print( " Header len:");
Serial.print( addressesLength );
Serial.println( );
#endif
payloadLength = 0 ;
// prepare the payload header with "To" Address length (top nibble) and "From" address length (bottom nibble)
payload[payloadLength] = (toAddressLength << 4) | fromAddressLength ;
payloadLength += 1;
// Copy the "To" address into payload
memcpy(&payload[payloadLength], to, toAddressLength);
payloadLength += toAddressLength ;
// Copy the "From" into payload
memcpy(&payload[payloadLength], from, fromAddressLength);
payloadLength += fromAddressLength ;
}
void PayloadAdd( const char *sensorId, float value, byte decimalPlaces)
{
byte sensorIdLength = strlen( sensorId ) ;
#ifdef DEBUG_TELEMETRY
Serial.print("PayloadAdd-float ");
Serial.print( "SensorId:");
Serial.print( sensorId );
Serial.print( " Len:");
Serial.print( sensorIdLength );
Serial.print( " Value:");
Serial.print( value, decimalPlaces );
Serial.print( " payloadLen:");
Serial.print( payloadLength);
#endif
memcpy( &payload[payloadLength], sensorId, sensorIdLength) ;
payloadLength += sensorIdLength ;
payload[ payloadLength] = SensorIdValueSeperator;
payloadLength += 1 ;
payloadLength += strlen( dtostrf(value, -1, decimalPlaces, (char *)&payload[payloadLength]));
payload[ payloadLength] = SensorReadingSeperator;
payloadLength += 1 ;
#ifdef DEBUG_TELEMETRY
Serial.print( " payloadLen:");
Serial.println( payloadLength);
#endif
}
void PayloadAdd( const char *sensorId, int value )
{
byte sensorIdLength = strlen( sensorId ) ;
#ifdef DEBUG_TELEMETRY
Serial.print("PayloadAdd-int ");
Serial.print( "SensorId:");
Serial.print( sensorId );
Serial.print( " Len:");
Serial.print( sensorIdLength );
Serial.print( " Value:");
Serial.print( value );
Serial.print( " payloadLen:");
Serial.print( payloadLength);
#endif
memcpy( &payload[payloadLength], sensorId, sensorIdLength) ;
payloadLength += sensorIdLength ;
payload[ payloadLength] = SensorIdValueSeperator;
payloadLength += 1 ;
payloadLength += strlen( itoa( value,(char *)&payload[payloadLength],10));
payload[ payloadLength] = SensorReadingSeperator;
payloadLength += 1 ;
#ifdef DEBUG_TELEMETRY
Serial.print( " payloadLen:");
Serial.println( payloadLength);
#endif
}
void PayloadAdd( const char *sensorId, unsigned int value )
{
byte sensorIdLength = strlen( sensorId ) ;
#ifdef DEBUG_TELEMETRY
Serial.print("PayloadAdd-unsigned int ");
Serial.print( "SensorId:");
Serial.print( sensorId );
Serial.print( " Len:");
Serial.print( sensorIdLength );
Serial.print( " Value:");
Serial.print( value );
Serial.print( " payloadLen:");
Serial.print( payloadLength);
#endif
memcpy( &payload[payloadLength], sensorId, sensorIdLength) ;
payloadLength += sensorIdLength ;
payload[ payloadLength] = SensorIdValueSeperator;
payloadLength += 1 ;
payloadLength += strlen( utoa( value,(char *)&payload[payloadLength],10));
payload[ payloadLength] = SensorReadingSeperator;
payloadLength += 1 ;
#ifdef DEBUG_TELEMETRY
Serial.print( " payloadLen:");
Serial.println( payloadLength);
#endif
}
void PayloadReset()
{
byte fromAddressLength = payload[0] & 0xf ;
byte toAddressLength = payload[0] >> 4 ;
byte addressesLength = toAddressLength + fromAddressLength ;
payloadLength = addressesLength + 1;
#ifdef DEBUG_TELEMETRY
Serial.print("PayloadReset- ");
Serial.print( "To len:");
Serial.print( toAddressLength );
Serial.print( " From len:");
Serial.print( fromAddressLength );
Serial.print( " Header len:");
Serial.println( addressesLength );
#endif
}
To get the application to download I had to configure the board in the Arduino IDE
Then change the jumpers
Initially I had some problems deploying my software because I hadn’t followed the instructions (the wiki everyone referred to appeared to be offline) and run the installation batch file (New dev machine since my previous maple based project).
I configured the device to upload to my Azure IoT Hub/Azure IoT Central gateway and it has been running reliably for a couple of days.
Azure IoT Central temperature and humidity values
Initially I had some configuration problems but I contacted Armtronix support and they promptly provided a couple of updated links for product and device documentation.
Grove – 4 pin Female Jumper to Grove 4 pin Conversion Cable USD3.90
The two sockets on the main board aren’t Grove compatible so I used the 4 pin female to Grove 4 pin conversion cable to connect the temperature and humidity sensor.
STM32 Blue Pill LoRaWAN node test rig
I used a modified version of my Arduino client code which worked after I got the pin reset pin sorted and the female sockets in the right order.
/*
Copyright ® 2019 July devMobile Software, All Rights Reserved
THIS CODE AND INFORMATION IS PROVIDED "AS IS" WITHOUT WARRANTY OF ANY
KIND, EITHER EXPRESSED OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE
IMPLIED WARRANTIES OF MERCHANTABILITY AND/OR FITNESS FOR A PARTICULAR
PURPOSE.
Adapted from LoRa Duplex communication with Sync Word
Sends temperature & humidity data from Seeedstudio
https://www.seeedstudio.com/Grove-Temperature-Humidity-Sensor-High-Accuracy-Min-p-1921.html
To my Windows 10 IoT Core RFM 9X library
https://blog.devmobile.co.nz/2018/09/03/rfm9x-iotcore-payload-addressing/
*/
#include <itoa.h>
#include <SPI.h>
#include <LoRa.h>
#include <TH02_dev.h>
#define DEBUG
//#define DEBUG_TELEMETRY
//#define DEBUG_LORA
// LoRa field gateway configuration (these settings must match your field gateway)
const char DeviceAddress[] = {"BLUEPILL"};
// Azure IoT Hub FieldGateway
const char FieldGatewayAddress[] = {"LoRaIoT1"};
const float FieldGatewayFrequency = 915000000.0;
const byte FieldGatewaySyncWord = 0x12 ;
// Bluepill hardware configuration
const int ChipSelectPin = PA4;
const int InterruptPin = PA0;
const int ResetPin = -1;
// LoRa radio payload configuration
const byte SensorIdValueSeperator = ' ' ;
const byte SensorReadingSeperator = ',' ;
const byte PayloadSizeMaximum = 64 ;
byte payload[PayloadSizeMaximum];
byte payloadLength = 0 ;
const int LoopDelaySeconds = 300 ;
// Sensor configuration
const char SensorIdTemperature[] = {"t"};
const char SensorIdHumidity[] = {"h"};
void setup()
{
Serial.begin(9600);
#ifdef DEBUG
while (!Serial);
#endif
Serial.println("Setup called");
Serial.println("LoRa setup start");
// override the default chip select and reset pins
LoRa.setPins(ChipSelectPin, ResetPin, InterruptPin);
if (!LoRa.begin(FieldGatewayFrequency))
{
Serial.println("LoRa begin failed");
while (true); // Drop into endless loop requiring restart
}
// Need to do this so field gateways pays attention to messsages from this device
LoRa.enableCrc();
LoRa.setSyncWord(FieldGatewaySyncWord);
#ifdef DEBUG_LORA
LoRa.dumpRegisters(Serial);
#endif
Serial.println("LoRa setup done.");
PayloadHeader((byte*)FieldGatewayAddress, strlen(FieldGatewayAddress), (byte*)DeviceAddress, strlen(DeviceAddress));
// Configure the Seeedstudio TH02 temperature & humidity sensor
Serial.println("TH02 setup");
TH02.begin();
delay(100);
Serial.println("TH02 Setup done");
Serial.println("Setup done");
}
void loop() {
// read the value from the sensor:
double temperature = TH02.ReadTemperature();
double humidity = TH02.ReadHumidity();
Serial.print("Humidity: ");
Serial.print(humidity, 0);
Serial.print(" %\t");
Serial.print("Temperature: ");
Serial.print(temperature, 1);
Serial.println(" *C");
PayloadReset();
PayloadAdd(SensorIdHumidity, humidity, 0) ;
PayloadAdd(SensorIdTemperature, temperature, 1) ;
LoRa.beginPacket();
LoRa.write(payload, payloadLength);
LoRa.endPacket();
Serial.println("Loop done");
delay(LoopDelaySeconds * 1000);
}
void PayloadHeader( byte *to, byte toAddressLength, byte *from, byte fromAddressLength)
{
byte addressesLength = toAddressLength + fromAddressLength ;
#ifdef DEBUG_TELEMETRY
Serial.println("PayloadHeader- ");
Serial.print( "To Address len:");
Serial.print( toAddressLength );
Serial.print( " From Address len:");
Serial.print( fromAddressLength );
Serial.print( " Addresses length:");
Serial.print( addressesLength );
Serial.println( );
#endif
payloadLength = 0 ;
// prepare the payload header with "To" Address length (top nibble) and "From" address length (bottom nibble)
payload[payloadLength] = (toAddressLength << 4) | fromAddressLength ;
payloadLength += 1;
// Copy the "To" address into payload
memcpy(&payload[payloadLength], to, toAddressLength);
payloadLength += toAddressLength ;
// Copy the "From" into payload
memcpy(&payload[payloadLength], from, fromAddressLength);
payloadLength += fromAddressLength ;
}
void PayloadAdd( const char *sensorId, float value, byte decimalPlaces)
{
byte sensorIdLength = strlen( sensorId ) ;
#ifdef DEBUG_TELEMETRY
Serial.println("PayloadAdd-float ");
Serial.print( "SensorId:");
Serial.print( sensorId );
Serial.print( " sensorIdLen:");
Serial.print( sensorIdLength );
Serial.print( " Value:");
Serial.print( value, decimalPlaces );
Serial.print( " payloadLength:");
Serial.print( payloadLength);
#endif
memcpy( &payload[payloadLength], sensorId, sensorIdLength) ;
payloadLength += sensorIdLength ;
payload[ payloadLength] = SensorIdValueSeperator;
payloadLength += 1 ;
payloadLength += strlen( dtostrf(value, -1, decimalPlaces, (char *)&payload[payloadLength]));
payload[ payloadLength] = SensorReadingSeperator;
payloadLength += 1 ;
#ifdef DEBUG_TELEMETRY
Serial.print( " payloadLength:");
Serial.print( payloadLength);
Serial.println( );
#endif
}
void PayloadAdd( const char *sensorId, int value )
{
byte sensorIdLength = strlen( sensorId ) ;
#ifdef DEBUG_TELEMETRY
Serial.println("PayloadAdd-int ");
Serial.print( "SensorId:");
Serial.print( sensorId );
Serial.print( " sensorIdLen:");
Serial.print( sensorIdLength );
Serial.print( " Value:");
Serial.print( value );
Serial.print( " payloadLength:");
Serial.print( payloadLength);
#endif
memcpy( &payload[payloadLength], sensorId, sensorIdLength) ;
payloadLength += sensorIdLength ;
payload[ payloadLength] = SensorIdValueSeperator;
payloadLength += 1 ;
payloadLength += strlen( itoa( value, (char *)&payload[payloadLength], 10));
payload[ payloadLength] = SensorReadingSeperator;
payloadLength += 1 ;
#ifdef DEBUG_TELEMETRY
Serial.print( " payloadLength:");
Serial.print( payloadLength);
Serial.println( );
#endif
}
void PayloadAdd( const char *sensorId, unsigned int value )
{
byte sensorIdLength = strlen( sensorId ) ;
#ifdef DEBUG_TELEMETRY
Serial.println("PayloadAdd-unsigned int ");
Serial.print( "SensorId:");
Serial.print( sensorId );
Serial.print( " sensorIdLen:");
Serial.print( sensorIdLength );
Serial.print( " Value:");
Serial.print( value );
Serial.print( " payloadLength:");
Serial.print( payloadLength);
#endif
memcpy( &payload[payloadLength], sensorId, sensorIdLength) ;
payloadLength += sensorIdLength ;
payload[ payloadLength] = SensorIdValueSeperator;
payloadLength += 1 ;
payloadLength += strlen( utoa( value, (char *)&payload[payloadLength], 10));
payload[ payloadLength] = SensorReadingSeperator;
payloadLength += 1 ;
#ifdef DEBUG_TELEMETRY
Serial.print( " payloadLength:");
Serial.print( payloadLength);
Serial.println( );
#endif
}
void PayloadReset()
{
byte fromAddressLength = payload[0] & 0xf ;
byte toAddressLength = payload[0] >> 4 ;
byte addressesLength = toAddressLength + fromAddressLength ;
payloadLength = addressesLength + 1;
#ifdef DEBUG_TELEMETRY
Serial.println("PayloadReset- ");
Serial.print( "To Address len:");
Serial.print( toAddressLength );
Serial.print( " From Address len:");
Serial.print( fromAddressLength );
Serial.print( " Addresses length:");
Serial.print( addressesLength );
Serial.println( );
#endif
}
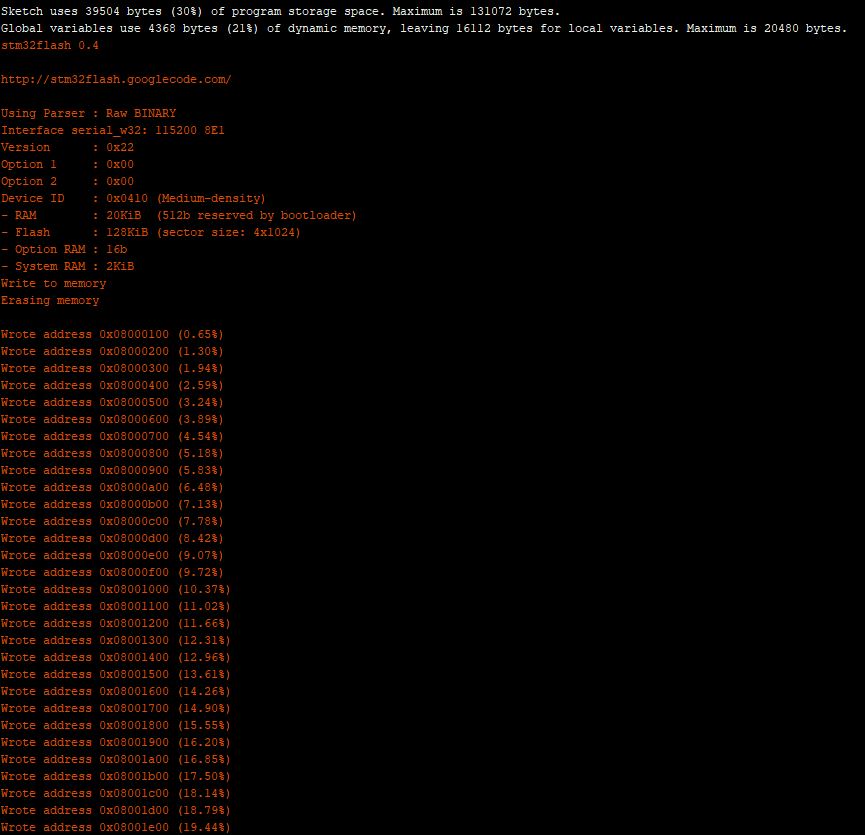
To get the application to compile I also had to include itoa.h rather than stdlib.h.
maple_loader v0.1
Resetting to bootloader via DTR pulse
[Reset via USB Serial Failed! Did you select the right serial port?]
Searching for DFU device [1EAF:0003]...
Assuming the board is in perpetual bootloader mode and continuing to attempt dfu programming...
dfu-util - (C) 2007-2008 by OpenMoko Inc.
Initially I had some problems deploying my software because I hadn’t followed the instructions and run the installation batch file.
I configured the device to upload to my Azure IoT Hub/Azure IoT Central gateway and after getting the device name configuration right it has been running reliably for a couple of days
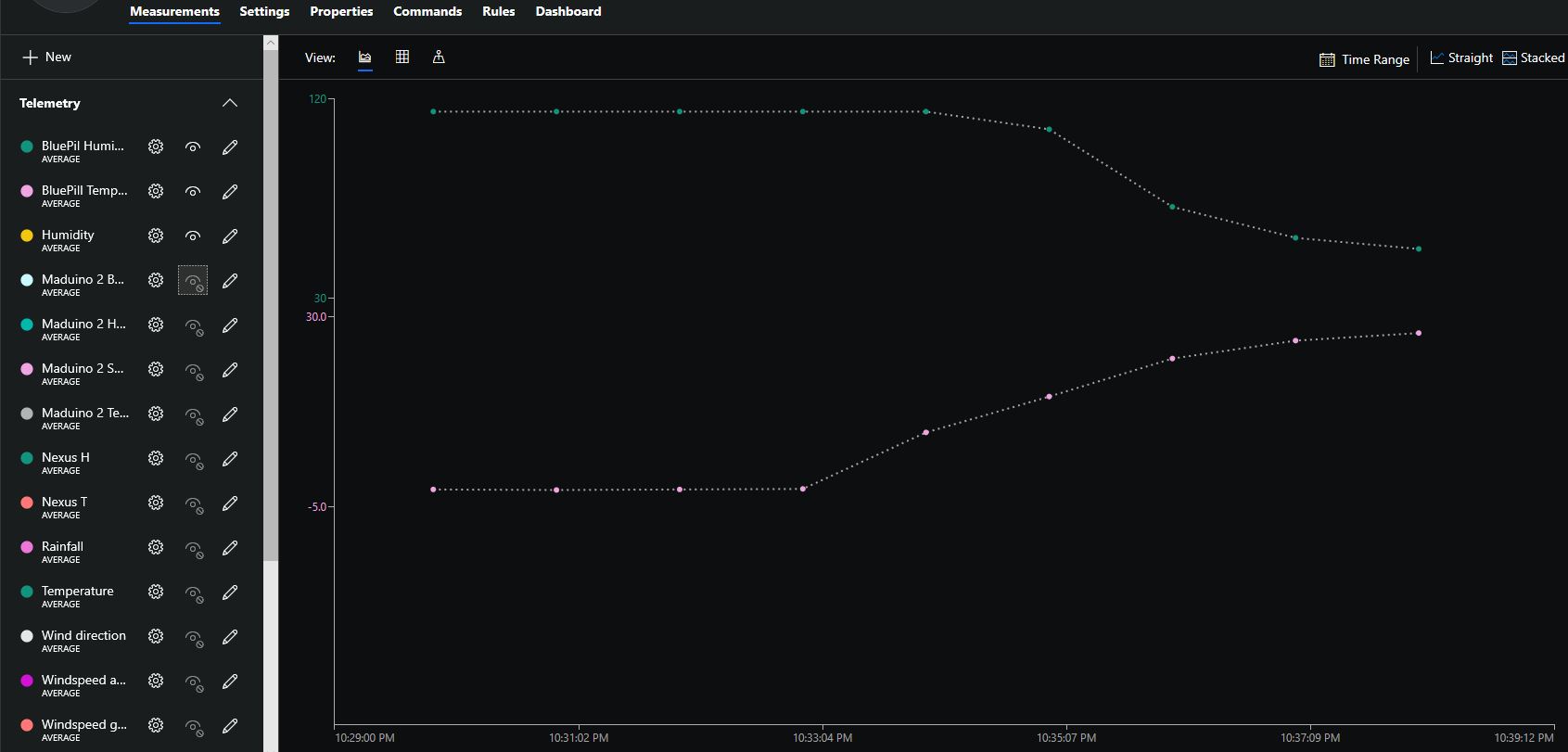
Azure IoT Central Temperature and humidity
The device was sitting outside on the deck and rapid increase in temperature is me bringing it inside.
The device is equipped with 11 x Seeedstudio Grove compatible sockets (2 x UART, 5 x I2C, 3 x ADC, 1 x PWM sockets) which support a wide variety of sensors.
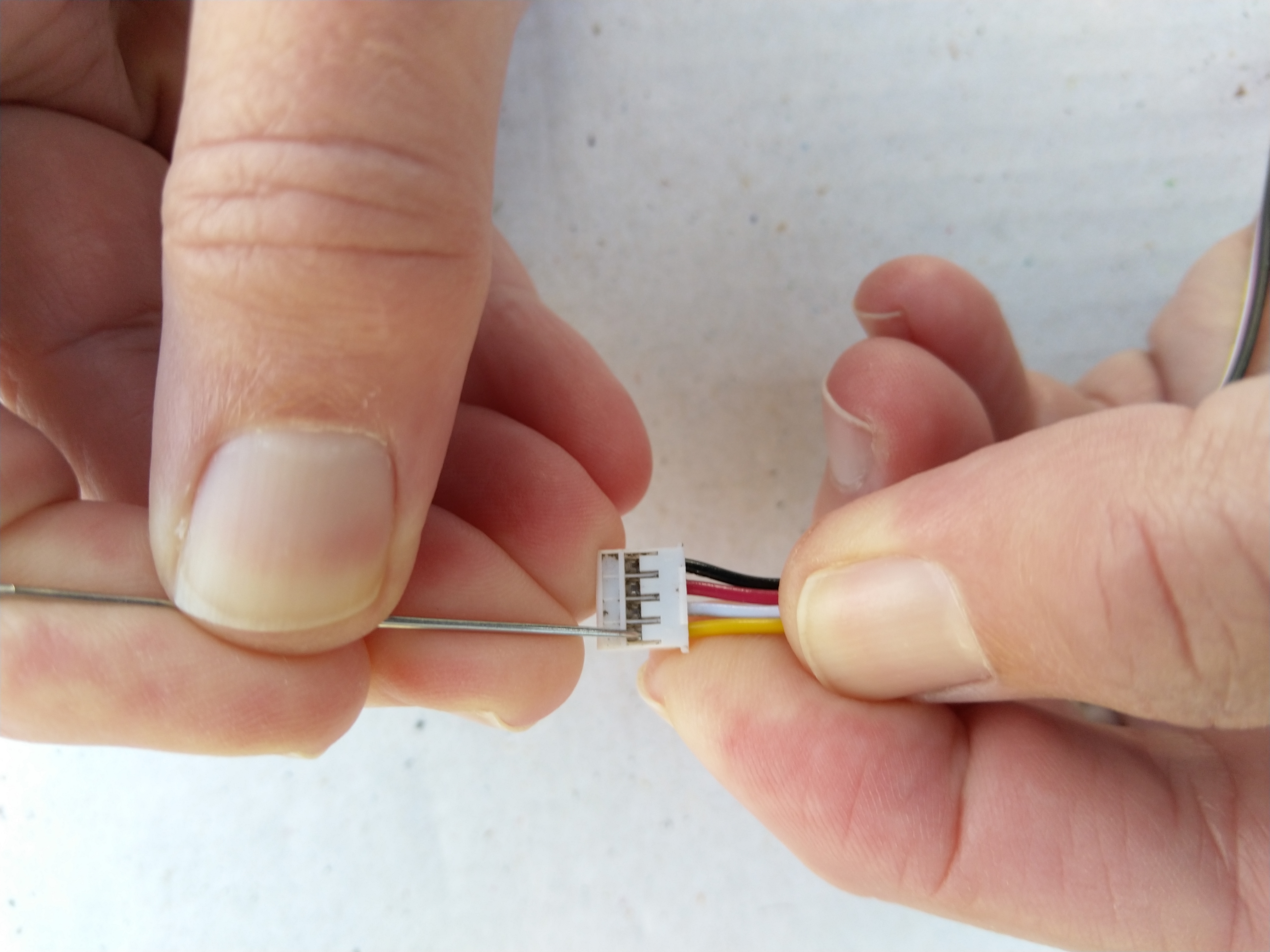
Test cables and devicesGrove Cable Modification with a cross stitch needle
So I could test all the analog port pins I modified a Grove Branch Cable by carefully unplugging the yellow and white branch cables and replacing them with yellow and white (plugged into the yellow connector on both sensor connectors) cables split from a spare Grove Universal Buckled 20cm cable. I used a pair of Grove Rotary Angle Sensors as analog inputs.
I used a pair of Grove illuminated buttons (Red, Yellow or Blue). The button was the digital input, the LED was the digital output. By uncommenting pairs of socket pins I could quickly step through all the ports checking that pressing the button toggled the state of the LED.
So I could test the PWM port I used a Grove Rotary Angle Sensor plugged into Socket 4 and a Grove LED (Red, Green or Blue) plugged into Socket 6 with a standard cable for pin 1 or my twisted cable for pin 2.
public class Program
{
public static void Main()
{
AnalogInput analogSensor = new AnalogInput(Pins.Analog.Socket4Pin1);
//const Cpu.PWMChannel LedPin = Pins.Pwm.Socket6Pin1;
const Cpu.PWMChannel LedPin = Pins.Pwm.Socket6Pin2;
PWM ledDim = new PWM(LedPin, 1000.0, 0.0, false);
ledDim.Start();
Debug.Print("Program running");
while (true)
{
double sensorValue = analogSensor.Read();
Debug.Print(DateTime.Now.ToString("hh:mm:ss") +" Value:" + sensorValue.ToString("F1"));
ledDim.DutyCycle = sensorValue;
Thread.Sleep(500);
}
}
}
All of the Analog, GPIO & PWM sockets/pins worked as expected, there maybe a couple of extra PWM outputs available on I2C sockets.
// <copyright file="client.cs" company="devMobile Software">
// Copyright ® 2019 Feb devMobile Software, All Rights Reserved
//
// MIT License
//
// Permission is hereby granted, free of charge, to any person obtaining a copy
// of this software and associated documentation files (the "Software"), to deal
// in the Software without restriction, including without limitation the rights
// to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
// copies of the Software, and to permit persons to whom the Software is
// furnished to do so, subject to the following conditions:
//
// The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software.
//
// THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
// IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
// FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
// AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
// LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
// OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
// SOFTWARE"
//
// </copyright>
namespace devMobile.IoT.Nexus.FieldGateway
{
using System;
using System.Text;
using System.Threading;
using Microsoft.SPOT;
using Microsoft.SPOT.Hardware;
using devMobile.IoT.NetMF.ISM;
using devMobile.NetMF.Sensor;
using IngenuityMicro.Nexus;
class NexusClient
{
private Rfm9XDevice rfm9XDevice;
private readonly TimeSpan dueTime = new TimeSpan(0, 0, 15);
private readonly TimeSpan periodTime = new TimeSpan(0, 0, 60);
private readonly SiliconLabsSI7005 sensor = new SiliconLabsSI7005();
private readonly Led _led = new Led();
private readonly byte[] fieldGatewayAddress = Encoding.UTF8.GetBytes("LoRaIoT1");
private readonly byte[] deviceAddress = Encoding.UTF8.GetBytes("Nexus915");
public NexusClient()
{
rfm9XDevice = new Rfm9XDevice(SPI.SPI_module.SPI3, (Cpu.Pin)28, (Cpu.Pin)15, (Cpu.Pin)26);
_led.Set(0, 0, 0);
}
public void Run()
{
rfm9XDevice.Initialise(frequency: 915000000, paBoost: true, rxPayloadCrcOn: true);
rfm9XDevice.Receive(deviceAddress);
rfm9XDevice.OnDataReceived += rfm9XDevice_OnDataReceived;
rfm9XDevice.OnTransmit += rfm9XDevice_OnTransmit;
Timer humidityAndtemperatureUpdates = new Timer(HumidityAndTemperatureTimerProc, null, dueTime, periodTime);
Thread.Sleep(Timeout.Infinite);
}
private void HumidityAndTemperatureTimerProc(object state)
{
_led.Set(0, 128, 0);
double humidity = sensor.Humidity();
double temperature = sensor.Temperature();
Debug.Print(DateTime.UtcNow.ToString("hh:mm:ss") + " H:" + humidity.ToString("F1") + " T:" + temperature.ToString("F1"));
rfm9XDevice.Send(fieldGatewayAddress, Encoding.UTF8.GetBytes("t " + temperature.ToString("F1") + ",H " + humidity.ToString("F0")));
}
void rfm9XDevice_OnTransmit()
{
_led.Set(0, 0, 0);
Debug.Print("Transmit-Done");
}
void rfm9XDevice_OnDataReceived(byte[] address, float packetSnr, int packetRssi, int rssi, byte[] data)
{
try
{
string messageText = new string(UTF8Encoding.UTF8.GetChars(data));
string addressText = new string(UTF8Encoding.UTF8.GetChars(address));
Debug.Print(DateTime.UtcNow.ToString("HH:MM:ss") + "-Rfm9X PacketSnr " + packetSnr.ToString("F1") + " Packet RSSI " + packetRssi + "dBm RSSI " + rssi + "dBm = " + data.Length + " byte message " + @"""" + messageText + @"""");
}
catch (Exception ex)
{
Debug.Print(ex.Message);
}
}
}
}
Overall the development process was good with no modifications to my RFM9X.NetMF library or SI7005 library (bar removing a Netduino I2C work around) required
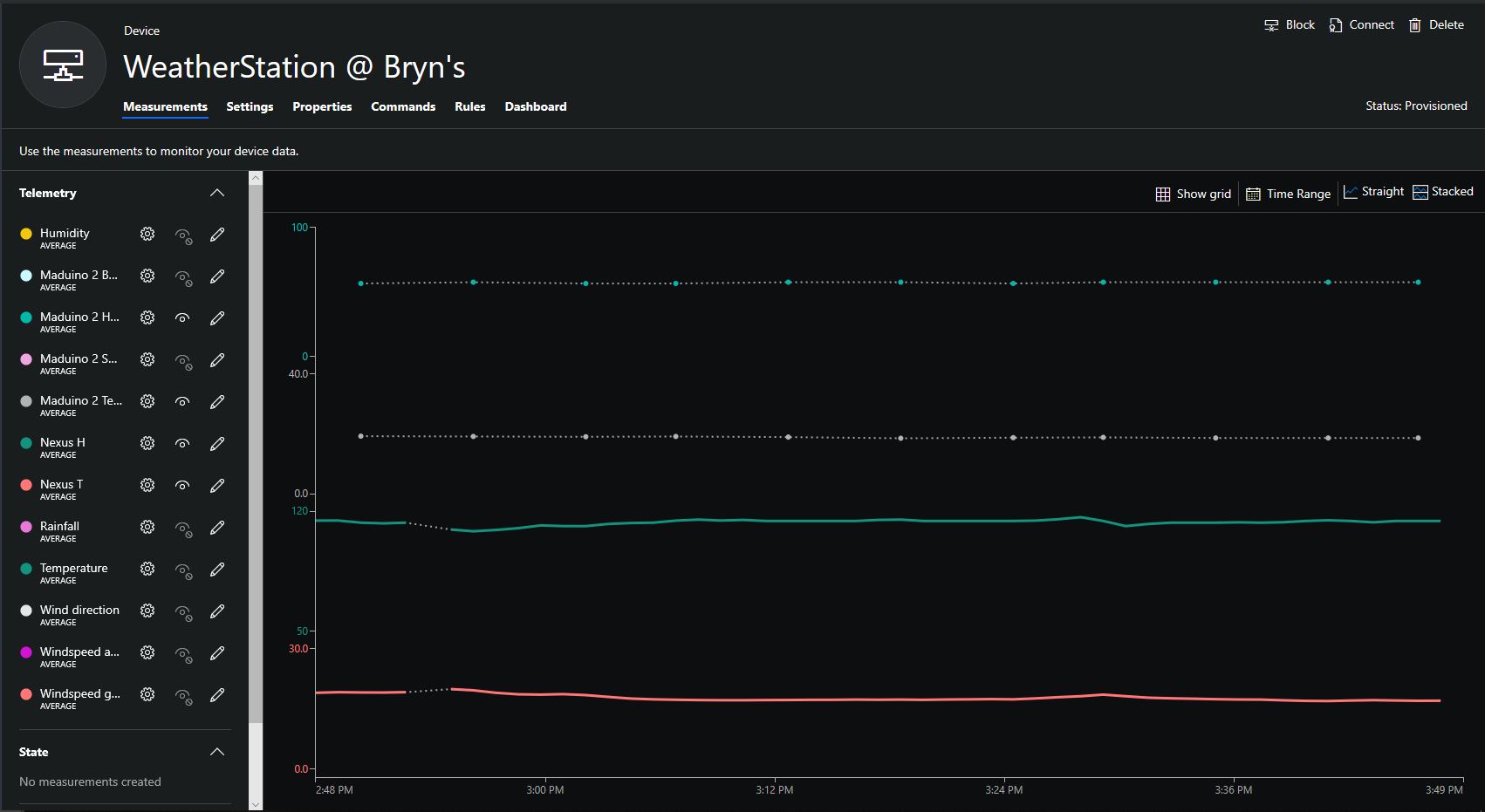
Nexus device with Seeedstudio Temperature & Humidity SensorsNexus Sensor data in Azure IoT Hub Field Gateway ETW LoggingNexus temperature & humidity data displayed in Azure IoT Central