A few months ago I purchased 1/2” and 3/4″ inch water flow sensors from SeeedStudio. My plan was to monitor our water and power consumption data to see what environmental impact my house has.
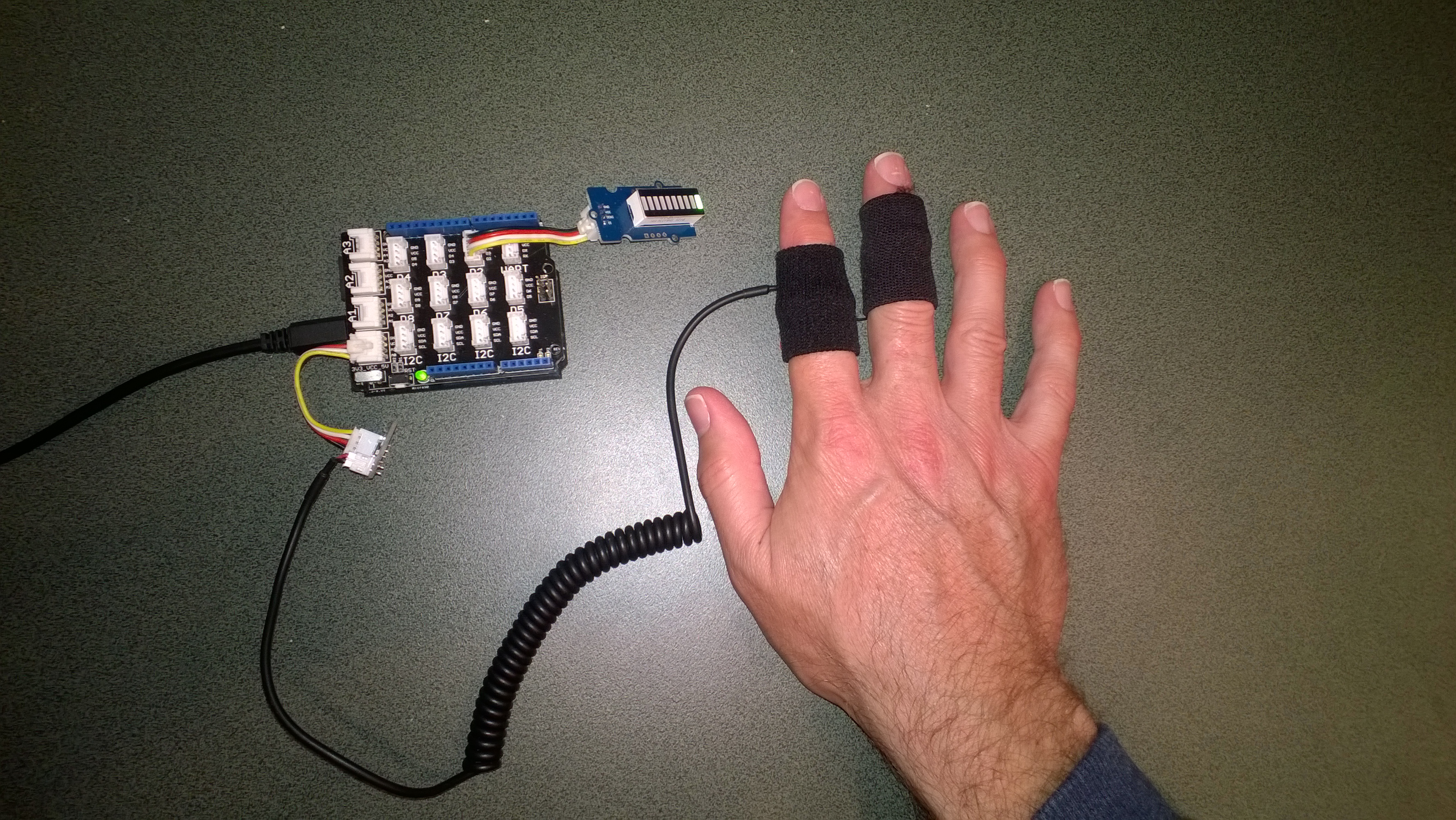
To see how the sensor works I built a simple proof of concept Netduino application which counted the pulses produced by the sensor and calculated the instantaneous water flow.
The next steps are to upload the water flow data to the cloud over a cabled then wireless connections.
public class Program
{
private static int waterFlowCounter = 0;
public static void Main()
{
InterruptPort flowCounterSensor = new InterruptPort(Pins.GPIO_PIN_D5, false, Port.ResistorMode.Disabled, Port.InterruptMode.InterruptEdgeHigh);
flowCounterSensor.OnInterrupt += new NativeEventHandler(flowCounter_OnInterrupt);
Timer waterFlowUpdate = new Timer(waterFlowUpdateProc, null, 0, 1000);
Thread.Sleep(Timeout.Infinite);
}
static void flowCounter_OnInterrupt(uint data1, uint data2, DateTime time)
{
Interlocked.Increment(ref waterFlowCounter);
}
static void waterFlowUpdateProc(object status)
{
int flowCount = Interlocked.Exchange(ref waterFlowCounter, 0);
double flowLitresMinute = flowCount / 5.5 ; // The q value from documentation
Debug.Print(flowLitresMinute.ToString("F1") + "L/m";);
}
}

water flow sensor
Bill of Materials (Prices as at 12-2014)
Grove Base Shield V2 USD8.90
G3/4″ Water Flow Sensor USD14.90