The premise of my Azure Meetup presentation was could you build an interesting project on a rainy weekend afternoon with a constrained budget (tank of 91 octane petrol) and minimal soldering .
Budget
Our family car is a VW Passat V6 4Motion which has a 62 Litre tank. The driver usually doesn’t usually stop to fill up until the fuel light has been on for a bit which helped.
Based on the most recent receipt the budget was NZD132.
Where possible I purchased parts locally (the tech equivalent of food miles) or on special.
My bill of materials (prices as at 2018-06) was on budget.
- Raspberry PI 3 Model B NZD55.20 (I walked down and collected this so no freight)
- Samsung EVO PLUS 32 GB MicroSD NZD 14.50 (On special, collected)
- Raspberry PI to nRF24L01+ Shield USD9.90 NZD14.18 (posted from Slovenia)
- nRf24L01 Long range wireless module USD 4.50 NZD25.49
- devDuino V2.2 USD17.99 NZD52.93
The devDuino V2.2 and nRF24L01 module were USD26.20 approx. NZD37.50 (including freight) from elecrow.
Tradeoffs
I powered my Raspberry PI with a spare cellphone charger (make sure it can supply enough current to reliably power the device).
The devDuino V2.has an ATSHA204A which provides a guaranteed unique 72-bit serial number (makes it harder to screw up provisioning devices in the field).
I use a 32G MicroSD rather than a 16G MicroSD card as I have had issued with 16G cards getting corrupted by more recent upgrades (possibly running out of space?)
The Raspberry PI shield requires a simple modification to enable interrupt driven operation.
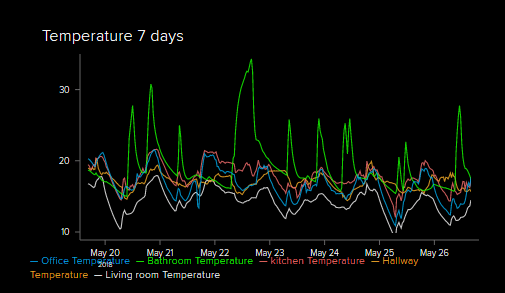
My sample devDuino V2.2 client uses an external temperature and humidity sensor, modifying this code to use the onboard temperature sensor an MCP9700 will be covered in another post.
The devDuino V2 is a little bit cheaper USD15.99 NZD37.31, has the same onboard temperature sensor as the V2.2 but no unique serial number chip.
The devDuino V4.0 has an onboard HTU21D temperature + humidity sensor but no unique serial number and the batteries are expensive.
The code and deployment instructions for the nRF24L01 field gateway applications for AdaFruit.IO and Azure IoT Hub/Azure IoT Central are available on hackster.IO.

AdaFruit.IO has free and USD10.00/month options which work well for many hobbyist projects.