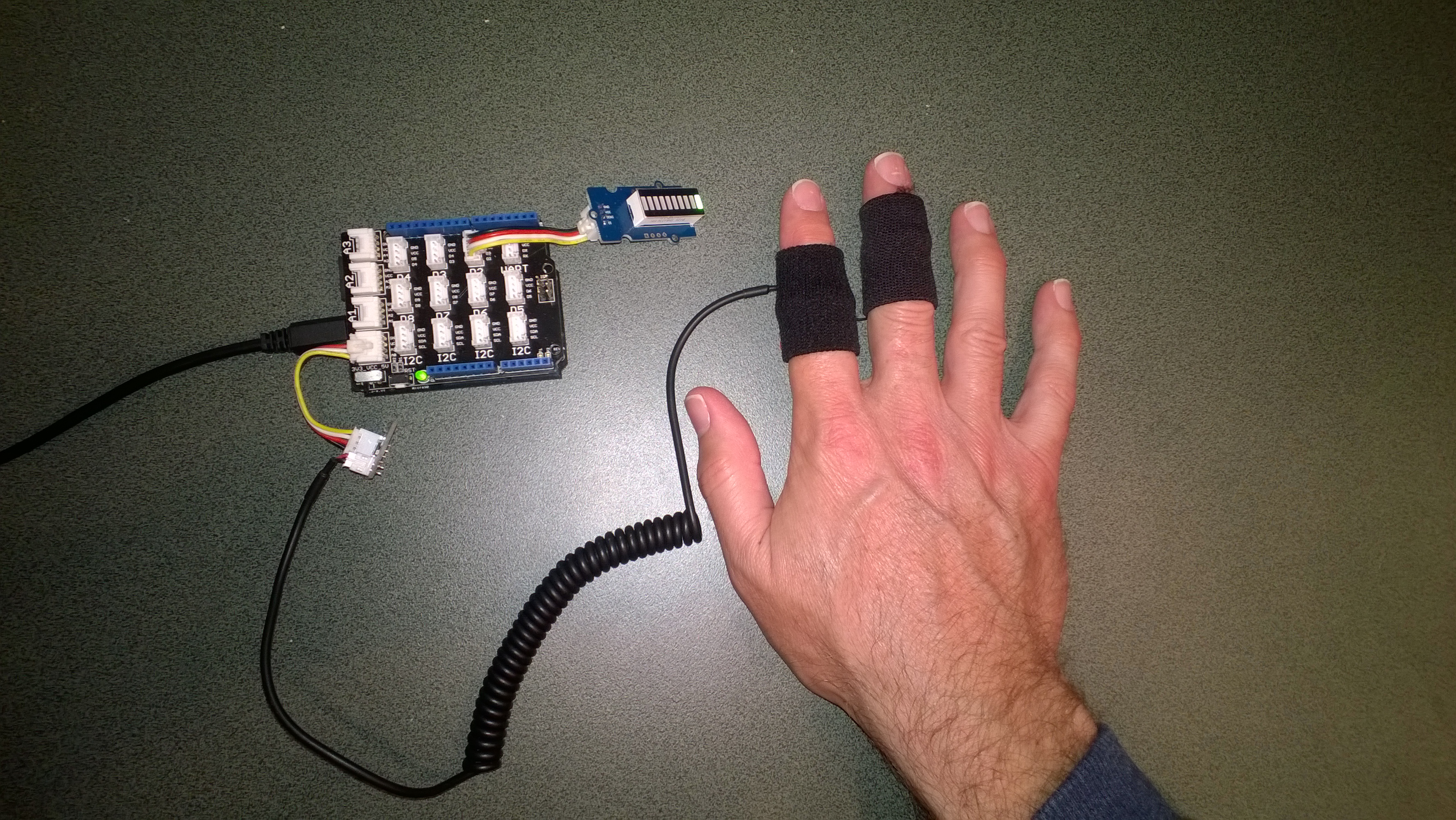
I have been working on a Netduino I2C driver for the Silicon Labs Si7005 Digital I2C Humidity & Temperature Sensor for weather station and building monitoring applications as it looks like a reasonably priced device which is not to complex to interface with.I’m using a SeeedStudio Grove – Temperature&Humidity Sensor (High-Accuracy & Mini) for development.
The first time I try and read anything from the device it fails. Otherwise my driver works as expected.
Bill of materials (prices as at April 2015)
- Netduino Plus 2 USD60 NZD108
- Grove – Temperature&Humidity Sensor (High-Accuracy & Mini) USD11.50
- Grove – Base Shield USD8.90
This code just shows the flow, I’ll package into a driver shortly
I strobe the I2C line which seems to help
using (OutputPort i2cPort = new OutputPort(Pins.GPIO_PIN_SDA, true))
{
i2cPort.Write(false);
Thread.Sleep(1000);
}
I then try and read the Device ID (0x50) from register 0X11 but this (and any other read fails)
byte[] writeBuffer = { RegisterIdDeviceId };
byte[] readBuffer = new byte[1];
I2CDevice.I2CTransaction[] action = new I2CDevice.I2CTransaction[]
{
I2CDevice.CreateWriteTransaction(writeBuffer),
I2CDevice.CreateReadTransaction(readBuffer)
};
int length = device.Execute(action, TransactionTimeoutMilliseconds);
Debug.Print("Byte count " + length.ToString());
foreach (byte Byte in readBuffer)
{
Debug.Print(Byte.ToString("X2"));
}
I can read the temperature and humidity by writing to the command register
byte[] writeBuffer = { RegisterIdConiguration, CMD_MEASURE_TEMP };
I2CDevice.I2CTransaction[] action = new I2CDevice.I2CTransaction[]
{
I2CDevice.CreateWriteTransaction(writeBuffer),
};
int length = device.Execute(action, TransactionTimeoutMilliseconds);
Debug.Print("Byte count" + length.ToString());
Then poll for measurement process to finish
conversionInProgress = true
do
{
byte[] writeBuffer = { RegisterIdStatus };
byte[] readBuffer = new byte[1];
I2CDevice.I2CTransaction[] action = new I2CDevice.I2CTransaction[]
{
I2CDevice.CreateWriteTransaction(writeBuffer4),
I2CDevice.CreateReadTransaction(readBuffer4)
};
int length = device.Execute(action, TransactionTimeoutMilliseconds);
Debug.Print("Byte count " + length.ToString());
foreach (byte Byte in readBuffer)
{
Debug.Print(Byte.ToString());
}
if ((readBuffer[RegisterIdStatus] && STATUS_RDY_MASK) != STATUS_RDY_MASK)
{
conversionInProgress = false;
}
} while (conversionInProgress);
Then finally read and convert the value
byte[] writeBuffer = { REG_DATA_H };
byte[] readBuffer = new byte[2];
I2CDevice.I2CTransaction[] action = new I2CDevice.I2CTransaction[]
{
I2CDevice.CreateWriteTransaction(writeBuffer),
I2CDevice.CreateReadTransaction(readBuffer)
};
int length = device.Execute(action, TransactionTimeoutMilliseconds);
Debug.Print("Byte count " + length.ToString());
foreach (byte Byte in readBuffer)
{
Debug.Print(Byte.ToString());
}
int temp = readBuffer[0];
temp = temp << 8;
temp = temp + readBuffer[1];
temp = temp >> 2;
double temperature = (temp / 32.0) - 50.0;
Debug.Print(" Temp " + temperature.ToString("F1"));