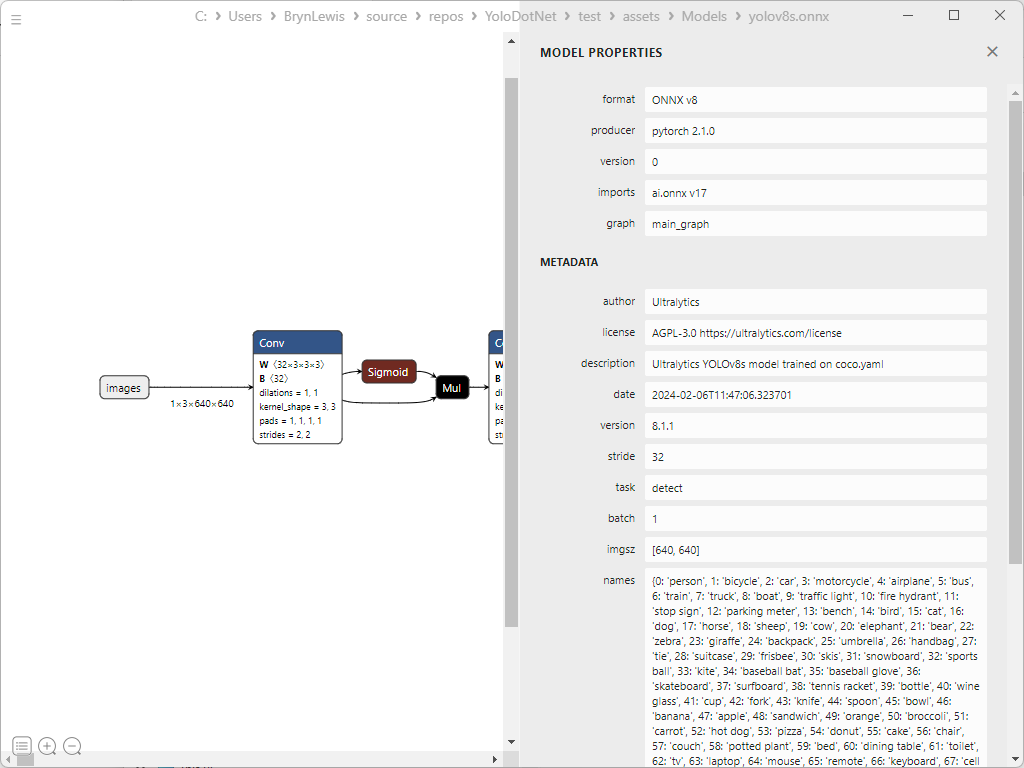
When I started with the Security Camera HTTP code and added code to process the images with Ultralytics Object Detection model I found the order of the prompts could make a difference. My first attempt at adding YoloSharp to the SecurityCameraHttpClient application with Github Copilot didn’t go well and needed some “human intervention”. When I thought more about the order of the prompts the adding the same functionality went a lot better.
// Use a stream rather than loading image from a file
// Use YoloSharp to run an onnx Object Detection model on the image
// Make the YoloPredictor a class variable
// Save image if object with specified image class name detected
// Modify so objectDetected supports multiple image class names
// Modify code to make use of GPU configurable
// Make display of detections configurable in app settings
// Make saving of image configurable in app settings
internal class Program
{
private static HttpClient _client;
private static bool _isRetrievingImage = false;
private static ApplicationSettings _applicationSettings;
private static YoloPredictor _yoloPredictor;
static void Main(string[] args)
{
Console.WriteLine($"{DateTime.UtcNow:yy-MM-dd HH:mm:ss} SecurityCameraClient starting");
#if RELEASE
Console.WriteLine("RELEASE");
#else
Console.WriteLine("DEBUG");
#endif
var configuration = new ConfigurationBuilder()
.AddJsonFile("appsettings.json", false, true)
.AddUserSecrets<Program>()
.Build();
_applicationSettings = configuration.GetSection("ApplicationSettings").Get<ApplicationSettings>();
// Initialize YoloPredictor with GPU configuration
_yoloPredictor = new YoloPredictor(_applicationSettings.OnnxModelPath, new YoloPredictorOptions()
{
UseCuda = _applicationSettings.UseCuda, // Configurable GPU usage
});
using (HttpClientHandler handler = new HttpClientHandler { Credentials = new NetworkCredential(_applicationSettings.Username, _applicationSettings.Password) })
using (_client = new HttpClient(handler))
using (var timer = new Timer(async _ => await RetrieveImageAsync(), null, _applicationSettings.TimerDue, _applicationSettings.TimerPeriod))
{
Console.WriteLine("Press any key to exit...");
Console.ReadKey();
}
}
private static async Task RetrieveImageAsync()
{
if (_isRetrievingImage) return;
_isRetrievingImage = true;
try
{
Console.WriteLine($"{DateTime.UtcNow:yy-MM-dd HH:mm:ss.fff} SecurityCameraClient download starting");
HttpResponseMessage response = await _client.GetAsync(_applicationSettings.CameraUrl);
response.EnsureSuccessStatusCode();
using (Stream imageStream = await response.Content.ReadAsStreamAsync())
{
var detections = _yoloPredictor.Detect(imageStream);
bool objectDetected = false;
foreach (var detection in detections)
{
if (_applicationSettings.LogDetections) // Check if logging detections is enabled
{
Console.WriteLine($"Detected {detection.Name.Name} with confidence {detection.Confidence}");
}
if (_applicationSettings.ClassNames.Contains(detection.Name.Name))
{
objectDetected = true;
}
}
if (objectDetected && _applicationSettings.SaveImage) // Check if saving images is enabled
{
string savePath = string.Format(_applicationSettings.SavePath, DateTime.UtcNow);
using (FileStream fileStream = new FileStream(savePath, FileMode.Create, FileAccess.Write, FileShare.None))
{
imageStream.Position = 0;
await imageStream.CopyToAsync(fileStream);
}
}
}
Console.WriteLine($"{DateTime.UtcNow:yy-MM-dd HH:mm:ss.fff} SecurityCameraClient download done");
}
catch (Exception ex)
{
Console.WriteLine($"An error occurred: {ex.Message}");
}
finally
{
_isRetrievingImage = false;
}
}
}
public class ApplicationSettings
{
public string CameraUrl { get; set; } = "";
public string SavePath { get; set; } = "";
public string Username { get; set; } = "";
public string Password { get; set; } = "";
public TimeSpan TimerDue { get; set; } = TimeSpan.Zero;
public TimeSpan TimerPeriod { get; set; } = TimeSpan.Zero;
public string OnnxModelPath { get; set; } = "";
public bool UseCuda { get; set; } = false; // Configurable GPU usage
public List<string> ClassNames { get; set; } //= new List<string>();
public bool LogDetections { get; set; } = false; // Configurable logging of detections
public bool SaveImage { get; set; } = false; // Configurable saving of images
}
}
The interactions Visual Studio IntelliSense with the GitHub Copilot prompts was interesting.

I wonder if this is because Visual Studio Intellisense has local context, whereas Github Copilot has “cloud” context.
It took a couple of failed attempts to find the best order, which I think would reduce over time.
The Copilot generated code in this post is not suitable for production


































{kind=link}