The Azure IoT Hub Cloud to Device(C2D) messaging approach didn’t work at all well with the Myriota Application Programming Interface(API). A downlink message can take up to 24hrs to be delivered and the Myriota (API) doesn’t currently queue control messages. Also, the Myriota (API) control message send method responds with 400 Bad Request if there is already a message being sent to a device. Azure IoT Hubs also support Direct Methods which provide immediate confirmation of the result of a request.
The Method Callback Delegate has different parameters, so I had to update the downlink formatter interface and update all of the sample downlink payload formatters.
public interface IFormatterDownlink
{
public byte[] Evaluate(string terminalId, string methodName, JObject? payloadJson, byte[] payloadBytes);
}
How direct methods will be processed is configured in the application settings. For each direct method name the downlink payload formatter to be invoked and an optional Javascript Object Notation(JSON) payload can be configured.
"IoTHub": {
...
"Methods": {
"LightsGoOn": {
"Formatter": "LightsOffOn.cs",
"Payload": "{\"Light\": true}"
},
"LightsGoOff": {
"Formatter": "LightsOffOn.cs",
"Payload": "{\"Light\": false}"
},
"FanSpeed": {
"Formatter": "FanSpeed.cs",
"Payload": ""
},
...
}
If there is no configuration for the direct method name, the payload formatter specified in Myriota device “DownlinkDefault” Attribute is used, and if that is not configured the default formatter in the payloadFormatters section of the application settings is used.
namespace devMobile.IoT.MyriotaAzureIoTConnector.Connector
{
internal class IoTHubDownlink(ILogger<IoTHubDownlink> _logger, IOptions<Models.AzureIoT> azureIoTSettings, IPayloadFormatterCache _payloadFormatterCache, IMyriotaModuleAPI _myriotaModuleAPI) : IIoTHubDownlink
{
private readonly Models.AzureIoT _azureIoTSettings = azureIoTSettings.Value;
public async Task<MethodResponse> IotHubMethodHandler(MethodRequest methodRequest, object userContext)
{
// DIY request identifier so processing progress can be tracked in Application Insights
string requestId = Guid.NewGuid().ToString();
Models.DeviceConnectionContext context = (Models.DeviceConnectionContext)userContext;
try
{
_logger.LogInformation("Downlink- TerminalId:{TerminalId} RequestId:{requestId} Name:{Name}", context.TerminalId, requestId, methodRequest.Name);
// Lookup payload formatter name, none specified use context one which is from device attributes or the default in configuration
string payloadFormatterName;
if (_azureIoTSettings.IoTHub.Methods.TryGetValue(methodRequest.Name, out Models.AzureIoTHubMethod? method) && !string.IsNullOrEmpty(method.Formatter))
{
payloadFormatterName = method.Formatter;
_logger.LogInformation("Downlink- IoT Hub TerminalID:{TermimalId} RequestID:{requestId} Method formatter:{payloadFormatterName} ", context.TerminalId, requestId, payloadFormatterName);
}
else
{
payloadFormatterName = context.PayloadFormatterDownlink;
_logger.LogInformation("Downlink- IoT Hub TerminalID:{TermimalId} RequestID:{requestId} Context formatter:{payloadFormatterName} ", context.TerminalId, requestId, payloadFormatterName);
}
// Display methodRequest.Data as Hex
if (methodRequest.Data is not null)
{
_logger.LogInformation("Downlink- IoT Hub TerminalID:{TerminalId} RequestID:{requestId} Data:{Data}", context.TerminalId, requestId, BitConverter.ToString(methodRequest.Data));
}
else
{
_logger.LogInformation("Downlink- IoT Hub TerminalID:{TerminalId} RequestID:{requestId} Data:null", context.TerminalId, requestId);
}
JObject? requestJson = null;
if ((method is not null) && !string.IsNullOrWhiteSpace(method.Payload))
{
// There is a matching method with a possible JSON payload
string payload = method.Payload.Trim();
if ((payload.StartsWith('{') && payload.EndsWith('}')) || (payload.StartsWith('[') && payload.EndsWith(']')))
{
// The payload is could be JSON
try
{
requestJson = JObject.Parse(payload);
}
catch (JsonReaderException jex)
{
_logger.LogWarning(jex, "Downlink- IoT Hub TerminalID:{TerminalId} RequestID:{requestId} Method Payload is not valid JSON", context.TerminalId, requestId);
return new MethodResponse(Encoding.ASCII.GetBytes($"{{\"message\":\"RequestID:{requestId} Method payload is not valid JSON.\"}}"), (int)HttpStatusCode.UnprocessableEntity);
}
}
else
{
// The payload couldn't be JSON
_logger.LogWarning("Downlink- IoT Hub TerminalID:{TerminalId} RequestID:{requestId} Method Payload is definitely not valid JSON", context.TerminalId, requestId);
return new MethodResponse(Encoding.ASCII.GetBytes($"{{\"message\":\"RequestID:{requestId} Method payload is definitely not valid JSON.\"}}"), (int)HttpStatusCode.UnprocessableEntity);
}
_logger.LogInformation("Downlink- IoT Hub TerminalID:{TerminalId} RequestID:{requestId} Method Payload:{requestJson}", context.TerminalId, requestId, JsonConvert.SerializeObject(requestJson, Formatting.Indented));
}
else
{
// If there was not matching method or the payload was "empty" see if the method request payload is valid
if (!string.IsNullOrWhiteSpace(methodRequest.DataAsJson))
{
string payload = methodRequest.DataAsJson.Trim();
if ((payload.StartsWith('{') && payload.EndsWith('}')) || (payload.StartsWith('[') && payload.EndsWith(']')))
{
// The payload is could be JSON
try
{
requestJson = JObject.Parse(payload);
_logger.LogInformation("Downlink- IoT Hub TerminalID:{TerminalId} RequestID:{requestId} DataAsJson:{requestJson}", context.TerminalId, requestId, JsonConvert.SerializeObject(requestJson, Formatting.Indented));
}
catch (JsonReaderException jex)
{
_logger.LogInformation(jex, "Downlink- IoT Hub TerminalID:{TerminalId} RequestID:{requestId} DataAsJson is not valid JSON", context.TerminalId, requestId);
}
}
}
}
// This "shouldn't" fail, but it could for invalid path to blob, timeout retrieving blob, payload formatter syntax error etc.
IFormatterDownlink payloadFormatter = await _payloadFormatterCache.DownlinkGetAsync(payloadFormatterName);
if ( requestJson is null )
{
requestJson = new JObject();
}
// This also "shouldn't" fail, but the payload formatters can throw runtime exceptions like null reference, divide by zero, index out of range etc.
byte[] payloadBytes = payloadFormatter.Evaluate(context.TerminalId, methodRequest.Name, requestJson, methodRequest.Data);
// Validate payload before calling Myriota control message send API method
if (payloadBytes is null)
{
_logger.LogWarning("Downlink- IoT Hub TerminalID:{TerminalId} Request:{requestId} Evaluate returned null", context.TerminalId, requestId);
return new MethodResponse(Encoding.ASCII.GetBytes($"{{\"message\":\"RequestID:{requestId} payload evaluate returned null.\"}}"), (int)HttpStatusCode.UnprocessableEntity);
}
if ((payloadBytes.Length < Constants.DownlinkPayloadMinimumLength) || (payloadBytes.Length > Constants.DownlinkPayloadMaximumLength))
{
_logger.LogWarning("Downlink- IoT Hub TerminalID:{TerminalId} RequestID:{requestId} PayloadBytes:{payloadBytes} length:{Length} invalid, must be {DownlinkPayloadMinimumLength} to {DownlinkPayloadMaximumLength} bytes", context.TerminalId, requestId, BitConverter.ToString(payloadBytes), payloadBytes.Length, Constants.DownlinkPayloadMinimumLength, Constants.DownlinkPayloadMaximumLength); ;
return new MethodResponse(Encoding.ASCII.GetBytes($"{{\"message\":\"RequestID:{requestId} payload evaluation length invalid.\"}}"), (int)HttpStatusCode.UnprocessableEntity);
}
// Finally send Control Message to device using the Myriota API
_logger.LogInformation("Downlink- IoT Hub TerminalID:{TerminalId} RequestID:{requestID} PayloadBytes:{payloadBytes} Length:{Length} sending", context.TerminalId, requestId, BitConverter.ToString(payloadBytes), payloadBytes.Length);
string messageId = await _myriotaModuleAPI.SendAsync(context.TerminalId, payloadBytes);
_logger.LogInformation("Downlink- IoT Hub TerminalID:{TerminalId} RequestID:{requestId} Myriota MessageID:{messageId} sent", context.TerminalId, requestId, messageId);
}
catch (Exception ex)
{
_logger.LogError(ex, "Downlink- IoT Hub TerminalID:{TerminalId} RequestID:{requestId} IotHubMethodHandler processing failed", context.TerminalId, requestId);
return new MethodResponse(Encoding.ASCII.GetBytes($"{{\"message\":\"TerminalID:{context.TerminalId} RequestID:{requestId} method handler failed.\"}}"), (int)HttpStatusCode.InternalServerError);
}
return new MethodResponse(Encoding.ASCII.GetBytes($"{{\"message\":\"TerminalID:{context.TerminalId} RequestID:{requestId} Message sent successfully.\"}}"), (int)HttpStatusCode.OK);
}
}
}
The validation of Direct Method MessageRequest DataAsJson and the method configuration payload is a three-step process, first any leading or trailing whitespace is removed, then the first and last characters are checked as a JSON payload has to enclosed in {}(an object) or [] (an array) characters, then finally JObject.Parse is used to populate a JObject.
If the method configuration payload is “broken” an HTTP 422 Unprocessable content is returned. If the MessageRequest DataAsJson is “broken” only the Direct Method MessageRequest Payload passed to the evaluator.

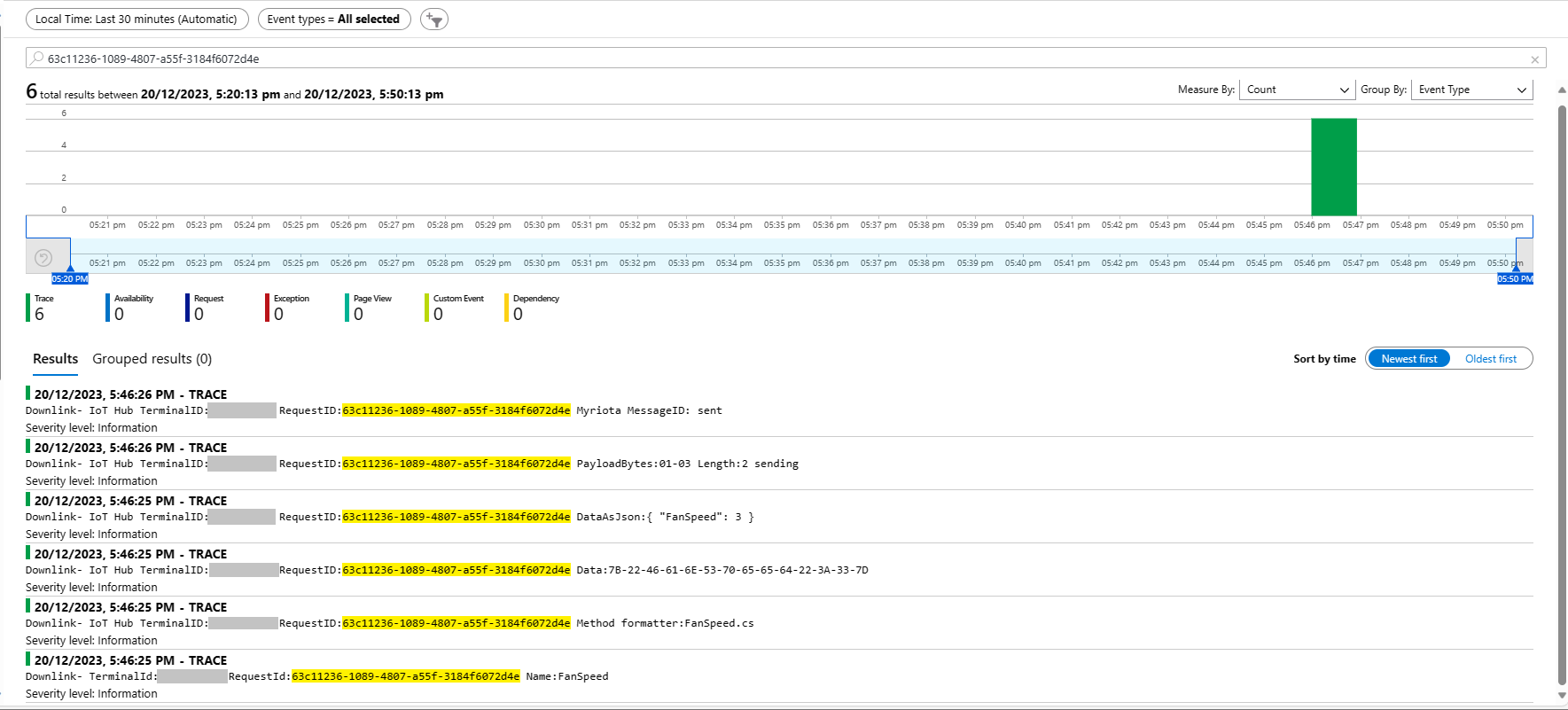
I used Azure IoT Explorer to invoke C2D methods with optional “hand-crafted” JavaScript Object Notation(JSON) payloads.
public class FormatterDownlink : PayloadFormatter.IFormatterDownlink
{
public byte[] Evaluate(string terminalId, string methodName, JObject payloadJson, byte[] payloadBytes)
{
byte? status = payloadJson.GetValue("FanSpeed", StringComparison.OrdinalIgnoreCase)?.Value<byte>();
if (!status.HasValue)
{
return new byte[] { };
}
return new byte[] { 1, status.Value };
}
}
The FanSpeed.cs payload formatter extracts the FanSpeed value from the JSON payload and returns a two byte array containing the message type and speed of the fan.

Each logging message starts with the TerminalID (to simplify searching for all the direct methods invoked on a device) and the requestId a Globally Unique Identifier (GUID) to simplify searching for all the “steps” associated with sending a message) with the rest of the logging message containing “step” specific diagnostic information.

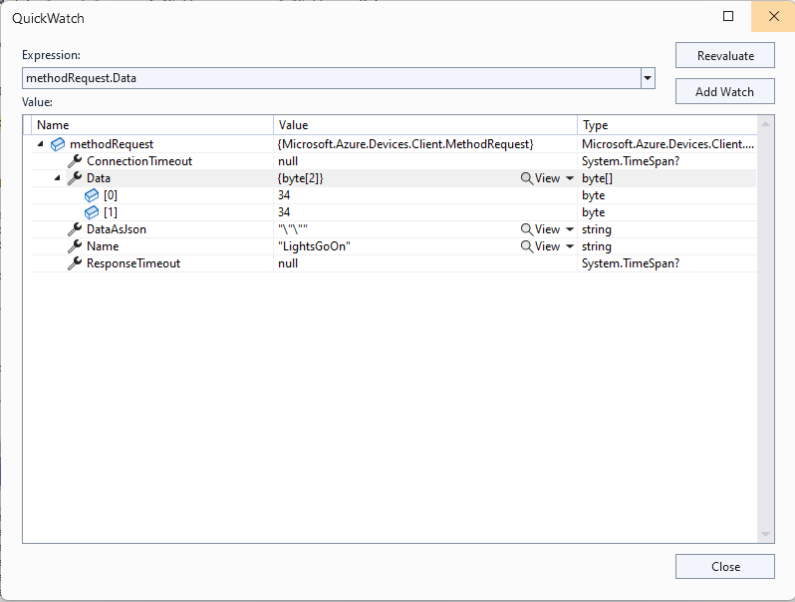
The Azure IoT Explorer payload for an empty message contained two ” characters which is a bit odd. I will have to build a test application which uses the Azure IoT Hub C2D direct method API to see if this is a “feature”.