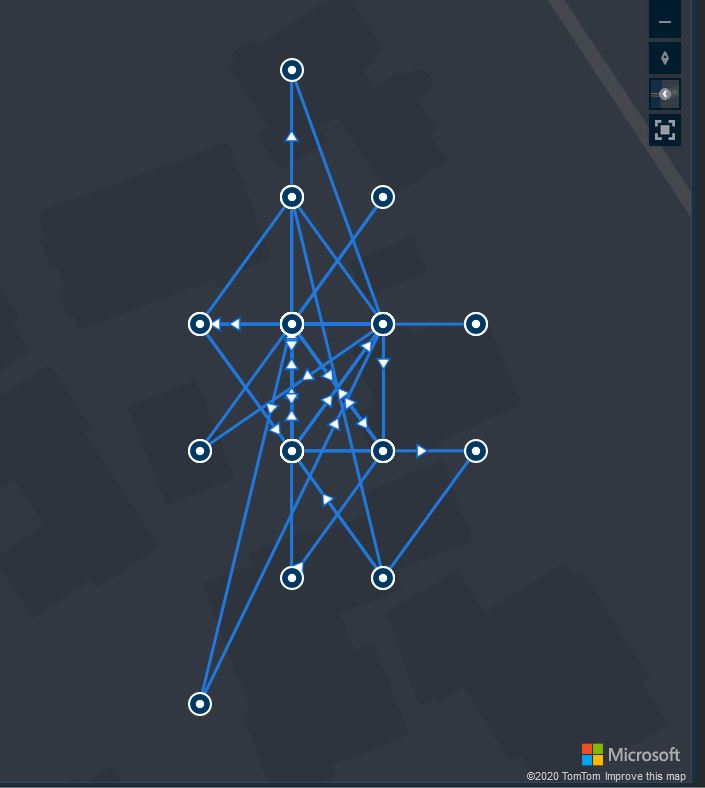
I left a Wisnode Track Lite RAK7200 outside on the deck for a day and the way the positions “snapped” to a grid caught my attention. Based on the size of my property the grid looked to be roughly 10 x 10 meters
The sample Low Power Payload Mbed C code uses a cast which is I think is the same as a floor.
“These functions round x downwards to the nearest integer, returning that value as a double. Thus, floor (1.5) is 1.0 and floor (-1.5) is -2.0.”
In the C code the latitude and longitude values are truncated to four decimal places and the altitude to two decimal places. In my C# code I used Math.Round and I wondered what impact that could have…
public void GpsLocationAdd(byte channel, float latitude, float longitude, float altitude)
{
IsChannelNumberValid(channel);
IsBfferSizeSufficient(Enumerations.DataType.Gps);
if ((latitude < Constants.LatitudeMinimum ) || (latitude > Constants.LatitudeMaximum))
{
throw new ArgumentException($"Latitude must be between {Constants.LatitudeMinimum} and {Constants.LatitudeMaximum}", "latitude");
}
if ((latitude < Constants.LongitudeMinimum) || (latitude > Constants.LongitudeMaximum))
{
throw new ArgumentException($"Longitude must be between {Constants.LongitudeMinimum} and {Constants.LongitudeMaximum}", "latitude");
}
if ((altitude < Constants.AltitudeMinimum) || (altitude > Constants.AltitudeMaximum))
{
throw new ArgumentException($"Altitude must be between {Constants.AltitudeMinimum} and {Constants.AltitudeMaximum}", "altitude");
}
int lat = (int)Math.Round(latitude * 10000.0f);
int lon = (int)Math.Round(longitude * 10000.0f);
int alt = (int)Math.Round(altitude * 100.0f);
buffer[index++] = channel;
buffer[index++] = (byte)Enumerations.DataType.Gps;
buffer[index++] = (byte)(lat >> 16);
buffer[index++] = (byte)(lat >> 8);
buffer[index++] = (byte)lat;
buffer[index++] = (byte)(lon >> 16);
buffer[index++] = (byte)(lon >> 8);
buffer[index++] = (byte)lon;
buffer[index++] = (byte)(alt >> 16);
buffer[index++] = (byte)(alt >> 8);
buffer[index++] = (byte)alt;
}
Using the WGS84 World Geodetic System Distance Calculator to calculate the distance where the Greenwich Meridian and the Equator cross off the coast of Ghana the theoretical maximum error is 15.69m.
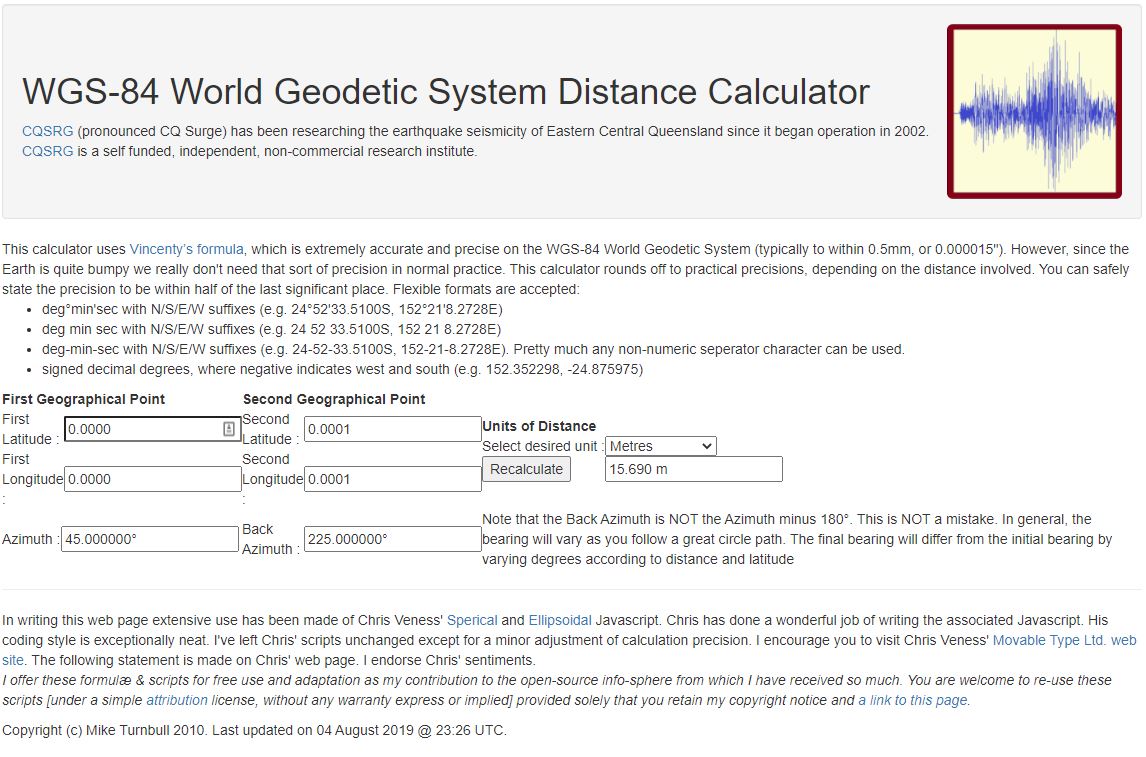
I live in Christchurch New Zealand and the theoretical maximum distance is 13.6 m. So, in summary the LPP latitude and longitude values are most probably fine for tracking applications.