Back in July I purchased a Satellite Transceiver Breakout – Swarm M138 from SparkFun and it has been sitting on the shelf since then. I want to get telemetry from a sensor to an Azure IoT Hub or Azure IoT Central over a Swarm Space link for a project I am working on.
I’ll need to solder on some headers and cut a couple of tracks on the breakout board so my device (most probably a SparkFun – ESP32-S2 WROOM) can connect to the Swarm-M1138 modem. The NET nanoFramework team have an IoT.Device Swarm Tile NuGet package which I will use to interface the device to the modem.
I have started with a “nasty” Proof of Concept(PoC) to figure out how to connect to the Swarm Hive API.
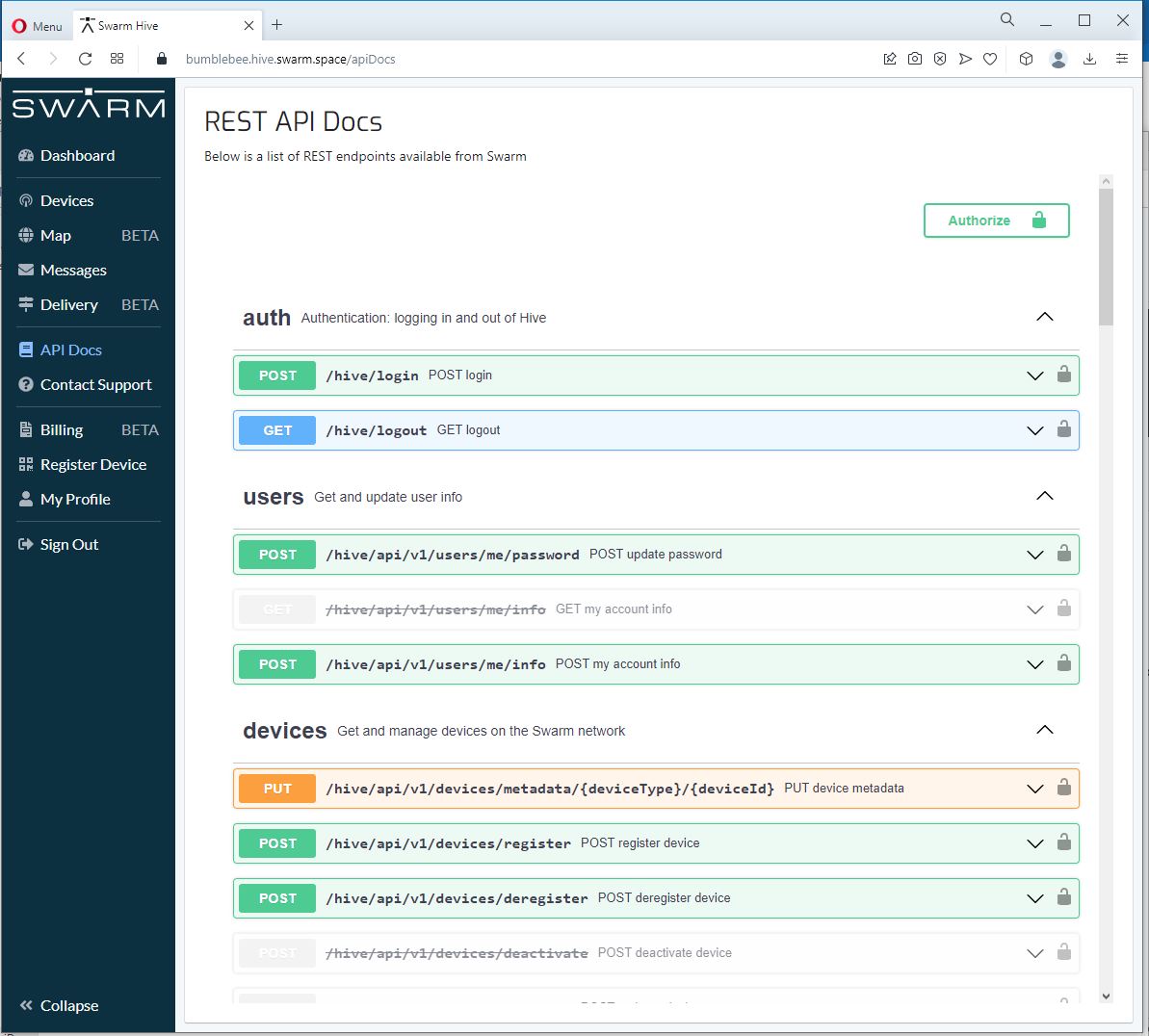
The Swarm Hive API has been published with Swagger/OpenAPI which is really simple to use. I used NSwagStudio to generate a C# client to I didn’t have to “handcraft” one.
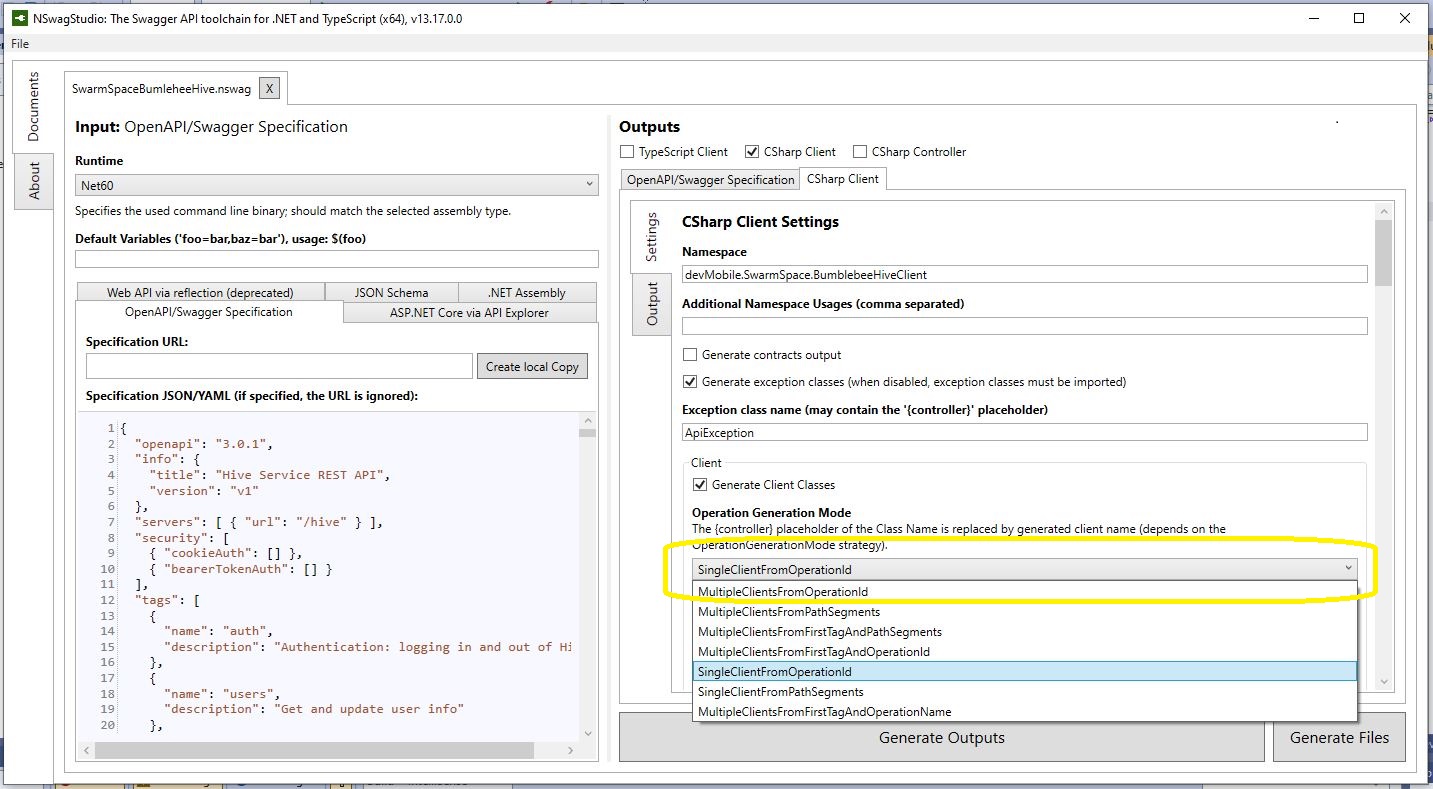
Initially the code would compile but I found a clue in a Github Issue from September 2017 which was to change the “Operation Generation Model” to SingleClientFromOperationId.(The setting is highlighted above).
static async Task Main(string[] args)
{
using (HttpClient httpClient = new HttpClient())
{
BumblebeeHiveClient.Client client = new BumblebeeHiveClient.Client(httpClient);
client.BaseUrl = "https://bumblebee.hive.swarm.space/hive/";
BumblebeeHiveClient.LoginForm loginForm = new BumblebeeHiveClient.LoginForm();
// https://bumblebee.hive.swarm.space/login/
loginForm.Username = "...";
loginForm.Password = "...";
Console.WriteLine($"devMobile SwarmSpace Bumblebee Hive Console Client");
Console.WriteLine("");
Console.WriteLine($"Login POST");
BumblebeeHiveClient.Response response = await client.PostLoginAsync(loginForm);
Console.WriteLine($"Token :{response.Token[..5]}.....{response.Token[^5..]}");
Console.WriteLine($"Press <enter> to continue");
Console.ReadLine();
string apiKey = "bearer " + response.Token;
httpClient.DefaultRequestHeaders.Add("Authorization", apiKey);
Console.WriteLine($"Device count GET");
string count = await client.GetDeviceCountAsync(1);
Console.WriteLine($"Device count :{count}");
Console.WriteLine($"Press <enter> to continue");
Console.ReadLine();
Console.WriteLine($"Device(s) information GET");
var devices = await client.GetDevicesAsync(1, null, null, null, null, null, null, null, null);
foreach (var device in devices)
{
Console.WriteLine($" Id:{device.DeviceId} Name:{device.DeviceName} Type:{device.DeviceType} Organisation:{device.OrganizationId}");
}
Console.WriteLine($"Press <enter> to continue");
Console.ReadLine();
Console.WriteLine($"User Context GET");
var userContext = await client.GetUserContextAsync();
Console.WriteLine($" Id:{userContext.UserId} Name:{userContext.Username} Country:{userContext.Country}");
Console.WriteLine("Additional properties");
foreach ( var additionalProperty in userContext.AdditionalProperties)
{
Console.WriteLine($" Id:{additionalProperty.Key} Value:{additionalProperty.Value}");
}
Console.WriteLine($"Press <enter> to exit");
Console.ReadLine();
}
}
I tried a couple of ways to attach the Swarm Hive API authorisation token (returned by the Login method) to client requests. After a couple for failed attempts, I “realised” that adding the “Authorization” header to the HttpClient defaultRequestHeaders was by far the simplest approach.
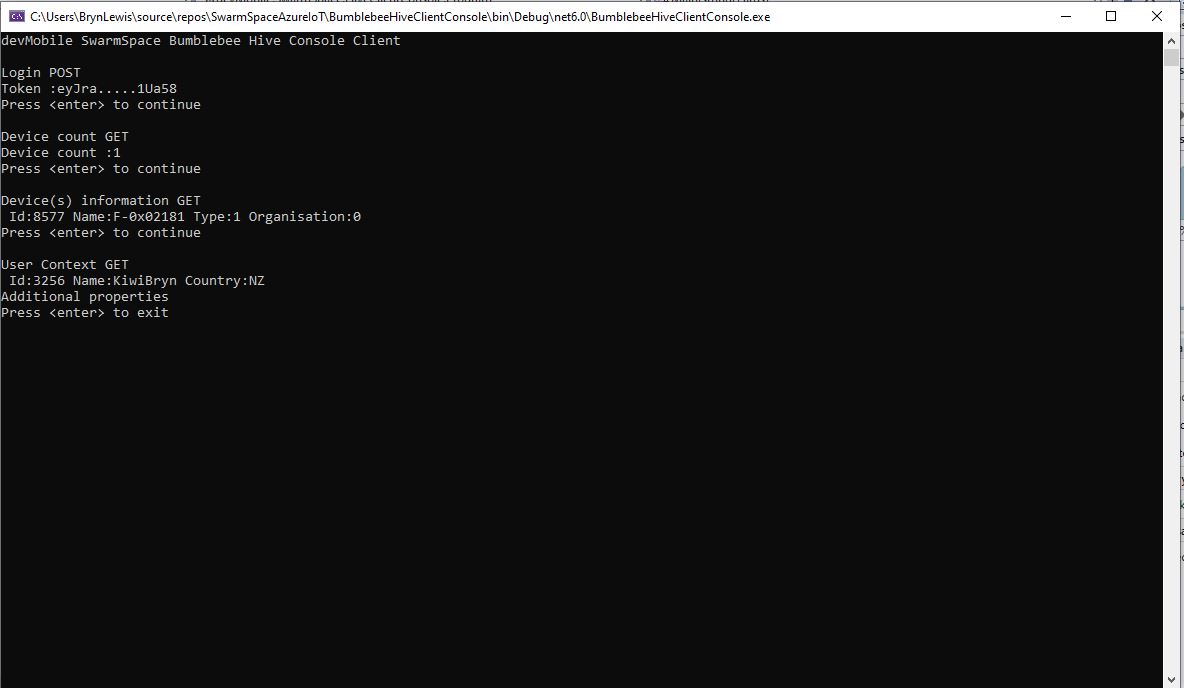
My “nasty” console application calls the Login method, then requests the number of devices (I only have one), gets a list of the properties of all the devices(very short list) then gets the User Context and displays their ID, Name and Country.