As part of my quadcopter project I purchased a Netduino Plus 2 for the flight controller. The increased performance 48MHz vs. 168MHz CPU and other improvements looked like it could make it possible to implement most or all of the control algorithms in C#.
So I could compare the performance of the I2C interfaces I setup two test rigs which polled an ADXL345 Accelerometer (using the Love Electronics sample code) 10,000 times for X,Y & Z acceleration values.
- Netduino Plus
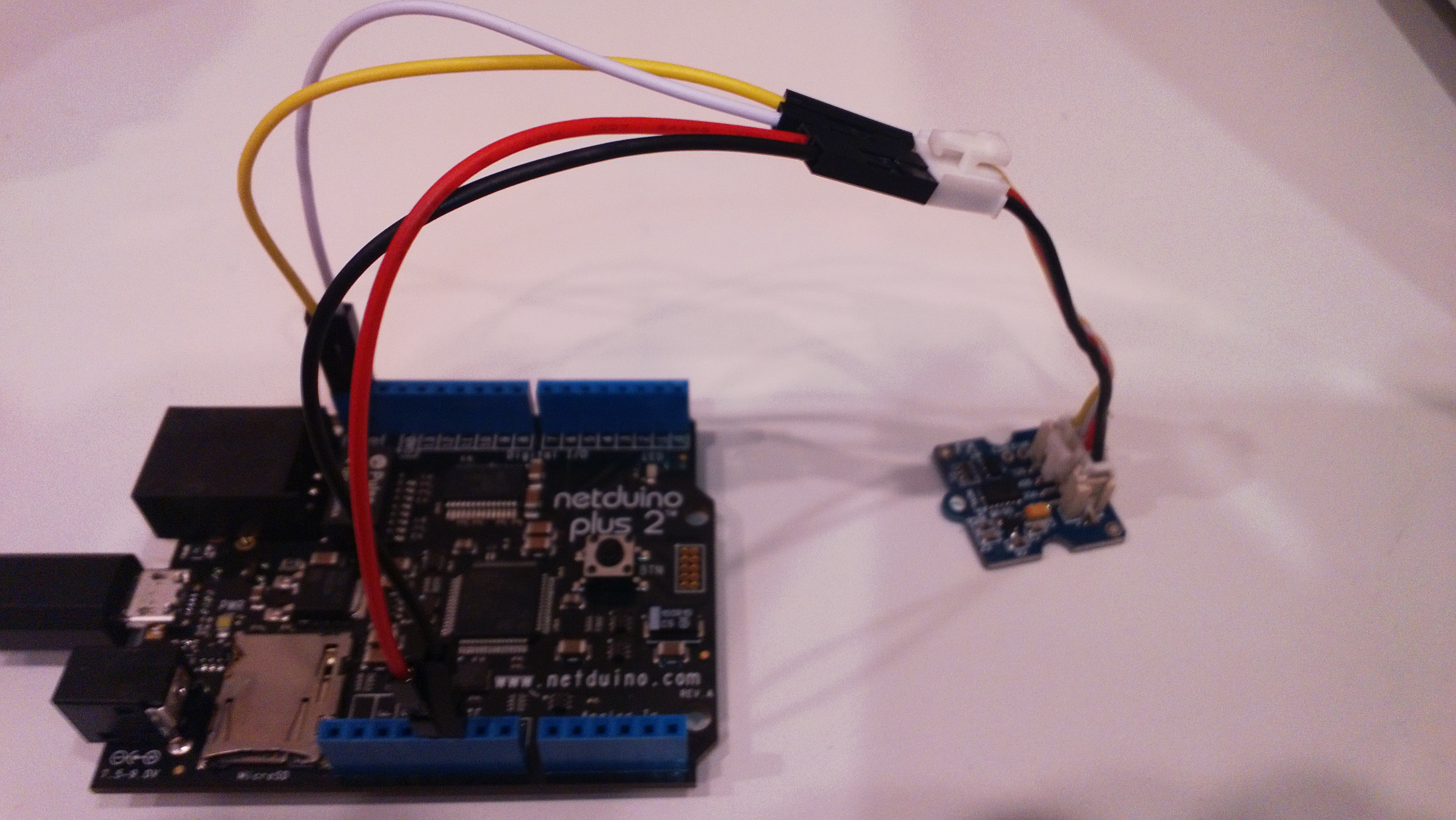
- Netduino Plus 2
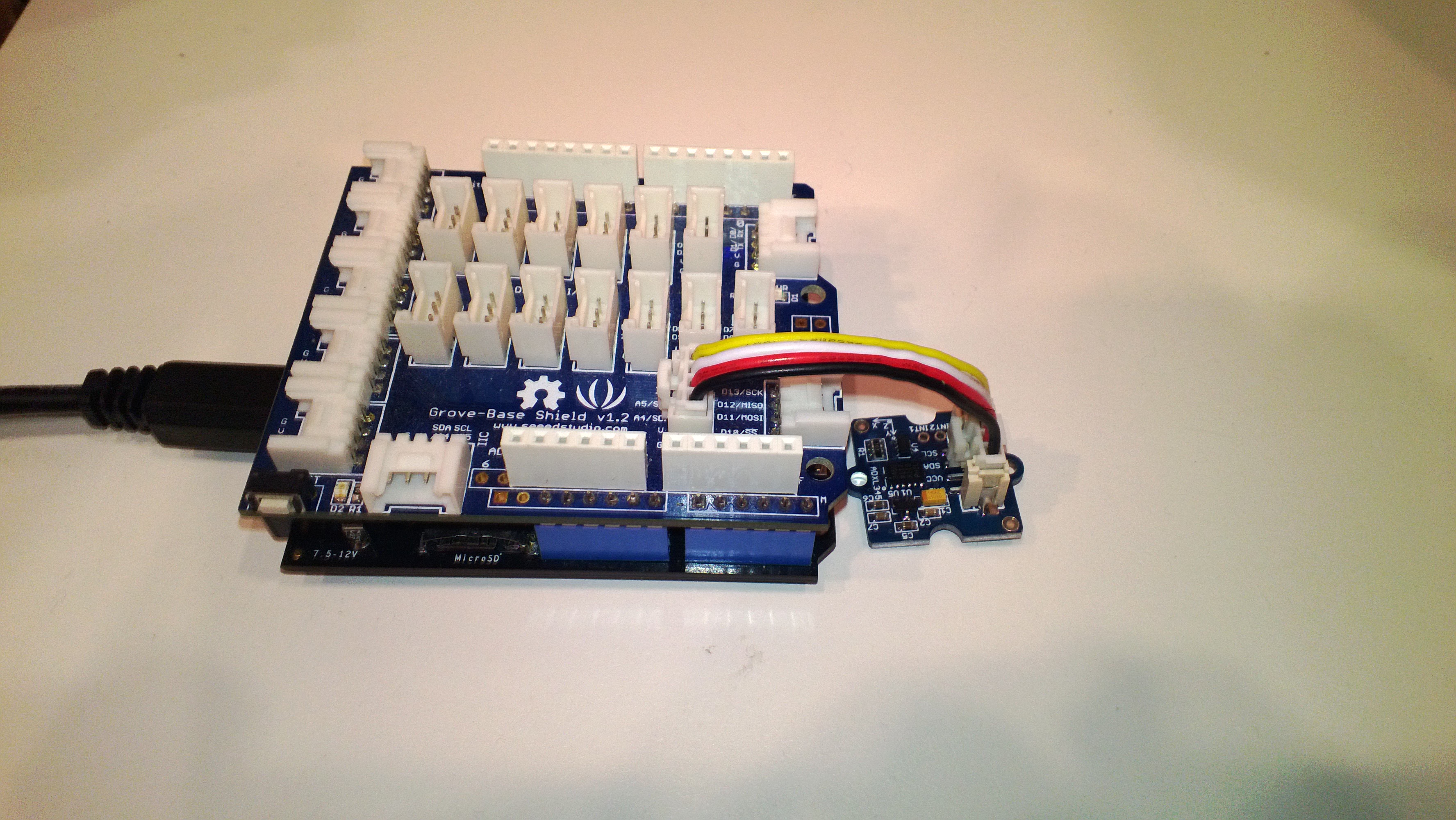
- Seeedstudio Grove – Base Shield
- SeeedStudio 3-Axis Digital Accelerometer
- SeeedStudio Universal 4 pin buckled 5CM cables
The different I2C pins on the Netduino plus 2 required some jumper cables
Both devices were running NetMF 4.2 and I monitored the output of the test harness using MF Deploy.
Netduino Plus
22.2797,22.3126,22.3313,22.3129,22.3590,22.3689,22.3497,22.3049,22.3649,22.3836
Average 22.3 seconds roughly 450/sec
Netduino Plus 2
6.8312,6.8059,6.8003,6.8051,6.8319,6.7999,6.8104,6.8194,6.8233,6.8096
Average 6.8 seconds roughly 1470/sec
